映射与字典¶
MicroPython 的字典和映射使用了称为开放寻址(open addressing)和线性探测(linear probing)的技术。本章详细介绍这两种方法。
开放寻址¶
开放寻址 用于解决冲突。冲突是非常常见的情况,当两个项恰好哈希到同一个槽位或位置时就会发生。例如,给定如下的哈希设置:
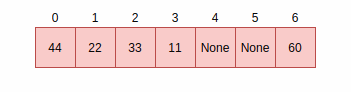
如果有一个请求要用 70 填充槽位 0,由于槽位 0 不为空,开放寻址会在字典中查找下一个可用的槽位来处理此请求。这种对替代位置的顺序搜索称为探测。有多种序列探测算法,但 MicroPython 使用的是下一节将介绍的线性探测。
线性探测¶
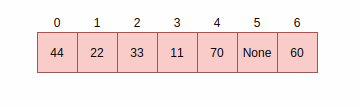
线性探测是在字典中查找可用地址或槽位的方法之一。在 MicroPython 中,它与开放寻址配合使用。与其他探测算法不同,为了处理上述请求,线性探测假定每次探测之间的间隔固定为 1。因此,该请求将通过把项放入下一个空闲槽位来处理,在我们的示例中即槽位 4:
搜索字典中的某一项时,也使用同样的方法,即开放寻址和线性探测。假设我们要搜索数据项 33。计算出的哈希值将为 2。查看槽位 2 会发现 33。此时,我们返回 True。搜索 70 则截然不同,因为在插入时发生了冲突。因此计算出的哈希值为 0,而该槽位当前保存的是 44。我们不会简单地返回 False,而是从位置 1 开始进行顺序搜索,直到找到项 70 或遇到一个空闲槽位为止。这就是在哈希中执行查找的一般方式:
// not yet found, keep searching in this table
pos = (pos + 1) % set->alloc;
if (pos == start_pos) {
// search got back to starting position, so index is not in table
if (lookup_kind & MP_MAP_LOOKUP_ADD_IF_NOT_FOUND) {
if (avail_slot != NULL) {
// there was an available slot, so use that
set->used++;
*avail_slot = index;
return index;
} else {
// not enough room in table, rehash it
mp_set_rehash(set);
// restart the search for the new element
start_pos = pos = hash % set->alloc;
}
}
} else {
return MP_OBJ_NULL;
}