OpenMV N6¶
La OpenMV N6 se basa en el STMicroelectronics STM32N657 (Cortex‑M55 @ 800 MHz) con una NPU integrada de 1 GHz capaz de 600 GOPS INT8. La placa combina la NPU con el sensor de obturador global PAG7936 de 1 MP montado en un soporte extraíble, Ethernet gigabit, USB‑C de alta velocidad, Wi‑Fi y Bluetooth 5.1, y ejecuta inferencia YOLOv8/YOLOv11 a 30 FPS junto con la transmisión de vídeo en directo.
Para ver la hoja de datos completa, fotos y dimensiones, consulta la página del producto OpenMV N6.
Aspectos destacados¶
STM32N657 Cortex‑M55 a 800 MHz (1280 DMIPS) con SIMD ARM Helium de 128 bits — rendimiento vectorial de 6,4 gigaops.
NPU de 1 GHz, 600 GOPS INT8 — ejecuta detección YOLOv8/YOLOv11 a 30 FPS.
ISP para RAW Bayer de hasta 5MP, GPU 2D para escalado y rotación 3D, codificación H.264 a 1080p y códec JPEG por hardware.
64 MB de SDRAM externa (16 bits @ 200 MHz DDR, 800 MB/s) más 4,2 MB de SRAM interna y 32 MB de flash octal (200 MHz DDR, 400 MB/s).
Sensor de obturador global a color PAG7936 de 1 MP.
IMU integrada (acelerómetro + giroscopio) y micrófono para fusión de audio y movimiento.
USB‑C de alta velocidad (480 Mb/s, límite de corriente de 1,5 A), Ethernet gigabit (compatible con PoE mediante shield), Wi‑Fi a/b/g/n + Bluetooth 5.1 (antena de chip u opción U.FL).
Conector microSD — SD hasta 2 GB, SDHC hasta 32 GB, SDXC hasta 2 TB.
Cargador LiPo (carga rápida de 500 mA), ADC de voltaje de batería, RTC con 8 KB de RAM de respaldo y un pin dedicado para batería de respaldo.
18 pines de E/S, todos con salida de 3,3 V / tolerantes a 3,3 V, 20 mA por pin, con capacidad de interrupción.
LED RGB de usuario, botón de usuario y un LED de estado independiente para carga / USB / alimentación VIN.
Advertencia
Los pines de E/S de la N6 no son tolerantes a 5 V. No conectes el dispositivo directamente a un MCU de 5 V como el Arduino Mega. Alimenta la N6 únicamente a través de VIN.
Distribución de pines¶
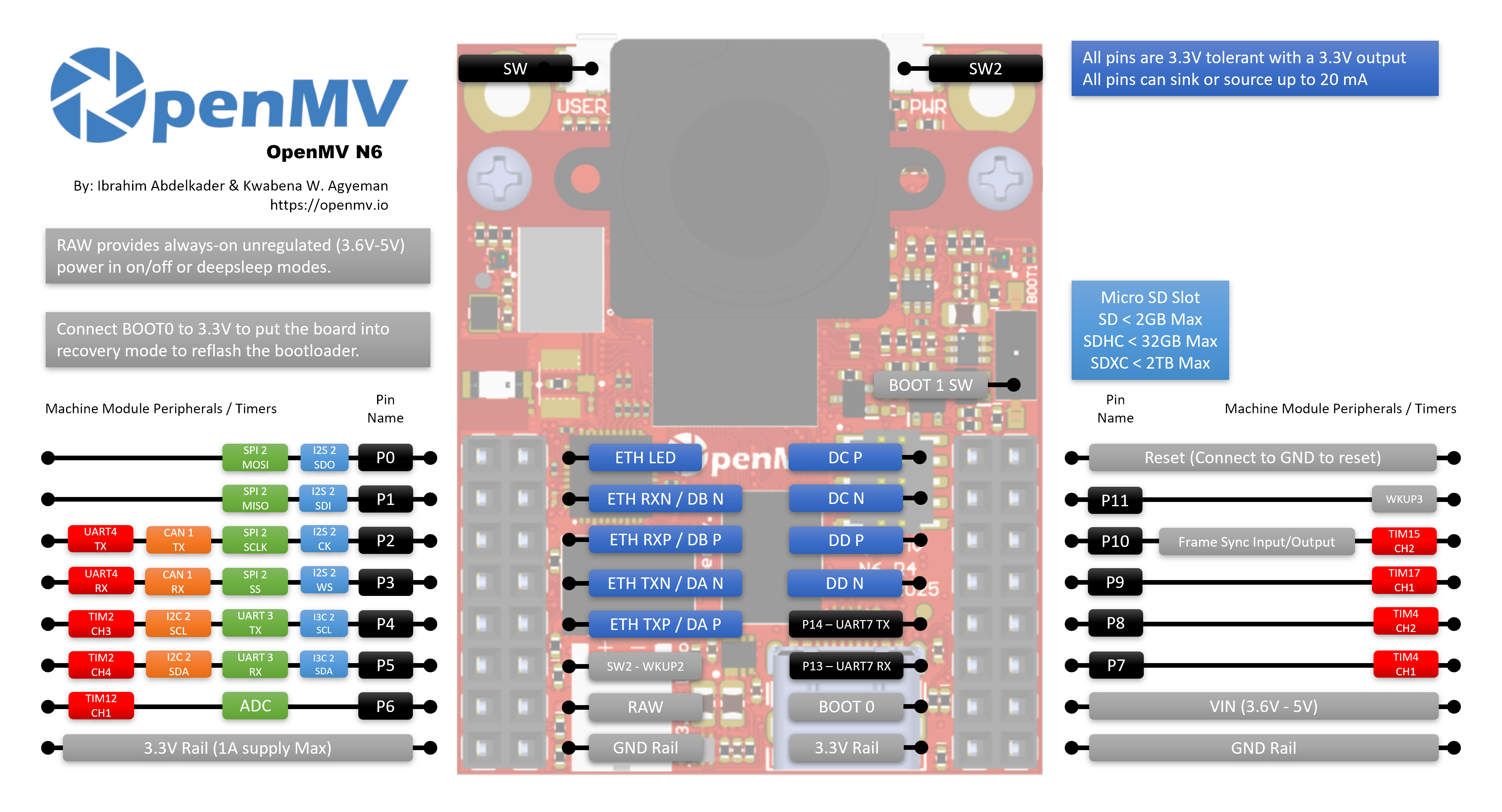
Referencia de pines¶
Nombre del pin |
Función |
|---|---|
P0 |
SPI2 MOSI / I2S2 SDO |
P1 |
SPI2 MISO / I2S2 SDI |
P2 |
SPI2 SCLK / UART4 TX / CAN1 TX / I2S2 CK |
P3 |
SPI2 SS / UART4 RX / CAN1 RX / I2S2 WS |
P4 |
I2C2 SCL / UART3 TX / TIM2 CH3 / I3C2 SCL |
P5 |
I2C2 SDA / UART3 RX / TIM2 CH4 / I3C2 SDA |
P6 |
TIM12 CH1 (sin ADC en este pin — consulta |
P6_ADC |
entrada ADC dedicada de 12 bits (conectada internamente a P6) |
P7 |
TIM4 CH1 |
P8 |
TIM4 CH2 |
P9 |
TIM17 CH1 |
P10 |
TIM15 CH2 / E/S de sincronización de fotogramas |
P11 |
despertar (activo en bajo, WKUP3) |
P12 |
RESET — conecta a GND para reiniciar la placa (no es un GPIO) |
P13 |
UART7 RX |
P14 |
UART7 TX |
P15 |
SPI4 CS |
P16 |
SPI4 SCK |
P17 |
SPI4 MISO |
P18 |
SPI4 MOSI |
SW |
botón de usuario (activo en bajo) |
ONOFF (SW2) |
botón de despertar de sueño profundo (activo en bajo, WKUP2) |
ST |
bajo con alimentación VIN, alto con alimentación USB |
CHG |
activo en bajo; bajo mientras se carga una batería LiPo conectada |
PG |
activo en bajo; bajo cuando hay alimentación VIN o USB presente |
BAT_ADC |
canal ADC interno que mide el voltaje de la batería LiPo conectada |
LED_RED |
canal rojo del LED RGB (activo en bajo) |
LED_GREEN |
canal verde del LED RGB (activo en bajo) |
LED_BLUE |
canal azul del LED RGB (activo en bajo) |
Nota
La línea de sincronización de fotogramas P10 es un bus compartido. Está cableada al MCU, al pin de disparo / exposición del sensor de la cámara y a la cabecera de usuario, todo a la vez. La dirección la define la aplicación — el MCU, el sensor o una señal externa pueden controlarla según cómo esté configurado el sensor (algunos sensores pueden usar el mismo pin como entrada de disparo o salida de exposición). Asegúrate de que solo haya un controlador activo a la vez.
Nota
ONOFF y P11 están referenciados al riel RAW siempre activo (no al riel conmutado de 3,3 V), por lo que siguen funcionando mientras el resto de la placa está en modo de sueño profundo / bajo consumo. Ambas entradas son activas en bajo.
Estos pines pasan por convertidores de nivel para poder operar en el riel RAW. Si necesitas imprescindiblemente un comportamiento GPIO directo de 3,3 V en ONOFF o P11 (por ejemplo, para controlarlos desde un MCU de 3,3 V sin pasar por el convertidor), la placa expone almohadillas de pull‑up y de puente de 0 ohmios que permiten omitir el convertidor. Se trata de una modificación de hardware avanzada — la mayoría de los usuarios deberían dejarla intacta.
Nota
Los pines P15–P18 se comparten con el PHY de Ethernet Gigabit, que está cableado y activo por defecto. Para usar estos pines como E/S de usuario debes resoldar la resistencia de 0 ohmios de la parte trasera de la placa a la posición GPIO. Esto solo deshabilita Ethernet gigabit — Ethernet de 10/100 Mb/s sigue funcionando en sus pines dedicados.
Pines de alimentación¶
3.3V — riel regulado de 3,3 V. Solo salida en la N6 — no inyectes alimentación externa en este pin. Hasta 1 A disponible para shields.
VIN — entrada de 5 V. Alimenta la placa y el cargador LiPo integrado.
RAW — entrada/salida, siempre activa (3,6 V – 5 V). Transporta la fuente que esté activa (VIN, USB o batería conectada) y también puede usarse como entrada. Debes alimentar RAW a través de un diodo en serie al inyectar alimentación en él — de lo contrario la corriente fluirá de vuelta hacia VIN/USB y dañará la fuente o la protección integrada.
GND — tierra común.
Nota
El chip de gestión de energía integrado selecciona automáticamente cuál de USB o VIN tiene el voltaje más alto para alimentar la placa y el cargador de batería. Si hay una LiPo conectada, se carga con el margen sobrante, y el controlador recurre a la batería para mantener la placa en funcionamiento si VIN/USB caen o se desconectan.
Nota
La parte trasera de la placa tiene almohadillas de soldadura para una batería de respaldo RTC externa de 3,3 V. Conectar una pila de botón a estas almohadillas mantiene en funcionamiento el RTC y los 8 KB de RAM de respaldo mientras el resto de la placa está sin alimentación.
Truco
Usa el estimador de duración de batería para modelar cuánto durará la N6 con una batería para un ciclo de trabajo activo / sueño profundo determinado.
Pines de Ethernet¶
La N6 expone los pares MDI del PHY de Ethernet en almohadillas dedicadas junto a la cabecera GPIO. Los pines MDI no se pueden cablear de forma segura directamente a un RJ45 — la magnética de Ethernet (un transformador de aislamiento, ya sea integrado en un magjack o en el shield) es obligatoria entre el PHY y el cable. El shield PoE de OpenMV la incluye; si fabricas tu propio conector, usa un RJ45 con magnética integrada o un transformador externo.
ETH_LED — LED de enlace/actividad. Activo en bajo cuando hay un enlace activo; parpadea con el tráfico.
DA P / DA N — par A (TX en 10/100, usado por todas las velocidades).
DB P / DB N — par B (RX en 10/100, usado por todas las velocidades).
DC P / DC N — par C, usado solo en gigabit.
DD P / DD N — par D, usado solo en gigabit.
10/100 Mb/s solo necesita los pares A y B. Gigabit necesita los cuatro pares A–D.
Pines de recuperación y depuración¶
RESET — conecta a GND para reiniciar la placa. Al soltarlo, el MCU arranca normalmente.
BOOT0 — conecta a 3,3 V mientras alimentas la placa para entrar en el modo de bootloader ROM. OpenMV IDE usa este modo para reflashear el bootloader integrado.
BOOT1 — interruptor que pone la placa en modo desarrollador para usarla con las herramientas de ST (un ST‑LINK conectado a la cabecera ARM SWD/JTAG de 10 pines). Déjalo deshabilitado para el funcionamiento normal con el firmware y las herramientas de OpenMV.
Se incluye una cabecera dedicada ARM SWD/JTAG de 10 pines, compatible con adaptadores ST‑LINK y SEGGER J‑Link.
Periféricos integrados¶
LEDs¶
La N6 tiene dos LEDs RGB:
LED RGB de usuario — controlable por software, expuesto como
LED_RED,LED_GREENyLED_BLUE:from machine import LED LED("LED_RED").on() LED("LED_GREEN").on() LED("LED_BLUE").on()
LED de alimentación — controlado directamente por el hardware de gestión de energía integrado, sin control por software. Úsalo para ver de un vistazo qué está haciendo la fuente.
Durante el funcionamiento:
Canal
Significado
Azul
VIN está alimentando la placa (apagado con USB)
Verde
alimentación USB o VIN presente
Rojo
cargando una batería LiPo conectada
En sueño profundo todos los canales están apagados excepto el rojo, que sigue encendido mientras se carga una LiPo.
Pines de estado de alimentación¶
Tres entradas de estado activas en bajo permiten que el firmware vea qué está haciendo el chip de gestión de energía integrado:
ST — bajo cuando la placa funciona con VIN, alto cuando funciona con alimentación USB.
CHG — bajo mientras se carga una batería LiPo conectada.
PG — bajo cuando hay alimentación VIN o USB presente.
from machine import Pin
on_vin = not Pin("ST", Pin.IN).value()
charging = not Pin("CHG", Pin.IN).value()
power_ok = not Pin("PG", Pin.IN).value()
Sensor de cámara¶
El PAG7936 se controla a través del módulo csi — sensores de cámara:
import csi
cam = csi.CSI()
cam.reset()
cam.pixformat(csi.RGB565)
cam.framesize(csi.HD) # 1280×800
cam.snapshot(time=2000) # let auto‑exposure settle
while True:
img = cam.snapshot()
El sensor está montado en un módulo extraíble — cámbialo por cualquiera de los otros módulos de cámara de OpenMV (obturador global, térmico, mayor resolución, etc.) sin modificar el resto de la placa.
El PAG7936 admite el modo disparado — la integración de píxeles se alinea exactamente con cada llamada a csi.CSI.snapshot en lugar del reloj de fotogramas de funcionamiento libre, lo cual resulta útil para sincronizar la captura con un evento externo u otro sensor. Habilítalo mediante csi.CSI.ioctl con csi.IOCTL_SET_TRIGGERED_MODE. La velocidad de fotogramas cae a aproximadamente la mitad del modo de funcionamiento libre porque la lectura ya no se solapa con la integración del siguiente fotograma:
cam.ioctl(csi.IOCTL_SET_TRIGGERED_MODE, True)
NPU¶
La NPU Neural‑ART de 1 GHz de la N6 (600 GOPS INT8) se expone a través del módulo ml — Aprendizaje automático. Los modelos almacenados en el sistema de archivos de solo lectura /rom se cargan directamente desde la flash sin copiarse a la RAM, por lo que incluso los detectores grandes caben cómodamente junto al búfer de fotogramas (frame buffer) en directo. Ejecuta un detector YOLOv8 en cada fotograma y dibuja las predicciones sobre la imagen en directo:
import csi
import time
import ml
from ml.postprocessing.ultralytics import YoloV8
# Initialize the sensor.
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.VGA)
# Load YOLO V8 model from ROM FS.
model = ml.Model("/rom/yolov8n_192.tflite", postprocess=YoloV8(threshold=0.4))
print(model)
# Visualization parameters.
n = len(model.labels)
model_class_colors = [
(int(255 * i // n), int(255 * (n - i - 1) // n), 255)
for i in range(n)
]
clock = time.clock()
while True:
clock.tick()
img = csi0.snapshot()
# boxes is a list of list per class of ((x, y, w, h), score) tuples
boxes = model.predict([img])
# Draw bounding boxes around the detected objects
for i, class_detections in enumerate(boxes):
rects = [r for r, score in class_detections]
labels = [model.labels[i] for j in range(len(rects))]
colors = [model_class_colors[i] for j in range(len(rects))]
ml.utils.draw_predictions(img, rects, labels, colors, format=None)
print(clock.fps(), "fps")
Micrófono¶
El micrófono integrado se captura a través de audio — Módulo de audio. Cada búfer llega como un bytearray PCM de 16 bits con signo, lo que facilita enormemente alimentarlo a ulab/numpy para un DSP rápido. Un detector de sonoridad sencillo — imprime cada vez que el volumen RMS supera un umbral:
import audio
from ulab import numpy as np
def loudness(pcmbuf):
samples = np.array(np.frombuffer(pcmbuf, dtype=np.int16), dtype=np.float)
rms = np.sqrt(np.mean(samples ** 2))
if rms > 10000:
print("Loud!", int(rms))
audio.init(channels=1, frequency=16000, gain_db=24)
audio.start_streaming(loudness)
while True:
pass
IMU¶
El acelerómetro + giroscopio integrado bajo el módulo de cámara se expone a través de imu — sensor imu:
import imu
import time
while True:
print(imu.acceleration_mg()) # (x, y, z) in milli‑g
print(imu.angular_rate_mdps()) # (x, y, z) in milli‑deg/s
time.sleep_ms(100)
Wi‑Fi¶
El CYW43439 integrado se expone mediante network — configuración de red como una interfaz de estación. Tras conectarse, ipconfig("addr4") devuelve el par (ip, netmask):
import network, time
wlan = network.WLAN(network.STA_IF)
wlan.active(True)
wlan.connect("ssid", "password")
while not wlan.isconnected():
time.sleep(1)
print("Wi‑Fi IP:", wlan.ipconfig("addr4")[0])
Bluetooth¶
El mismo CYW43439 también expone Bluetooth 5.1. Usa aioble — BLE asíncrono para BLE compatible con asyncio — por ejemplo, anunciarse como periférico y esperar a que un central se conecte:
import asyncio
import aioble
async def run():
while True:
conn = await aioble.advertise(250_000, name="OpenMV-N6")
print("Connected:", conn.device)
await conn.disconnected()
asyncio.run(run())
Ethernet¶
Cuando se conecta un RJ45 (con magnética) a las almohadillas MDI, el PHY gigabit aparece como una interfaz LAN. El DHCP se ejecuta automáticamente una vez que el enlace se activa:
import network, time
lan = network.LAN()
lan.active(True)
while not lan.isconnected():
time.sleep(1)
print("Ethernet IP:", lan.ipconfig("addr4")[0])
Tarjeta microSD¶
Cuando se inserta una tarjeta, se monta automáticamente en /sdcard y se puede usar a través del sistema de archivos habitual:
import os
for entry in os.listdir("/sdcard"):
print(entry)
Referencia de buses¶
GPIO¶
Usa machine.Pin para leer o controlar cualquiera de los pines serigrafiados. Las salidas son CMOS de 3,3 V y pueden absorber/suministrar hasta 20 mA por pin.
from machine import Pin
out = Pin("P0", Pin.OUT)
out.on()
out.off()
out.value(1)
inp = Pin("P1", Pin.IN, Pin.PULL_UP)
print(inp.value())
Cualquier pin de entrada también puede disparar una interrupción en las transiciones de flanco:
def handler(pin):
print("triggered:", pin)
Pin("P1", Pin.IN, Pin.PULL_UP).irq(
handler, Pin.IRQ_FALLING | Pin.IRQ_RISING,
)
UART¶
Bus |
TX |
RX |
|---|---|---|
UART3 |
P4 |
P5 |
UART4 |
P2 |
P3 |
UART7 |
P14 |
P13 |
from machine import UART
uart = UART(3, baudrate=115200)
uart.write("hello")
uart.read(5)
I²C¶
Bus |
SCL |
SDA |
|---|---|---|
I2C2 |
P4 |
P5 |
from machine import I2C
i2c = I2C(2, freq=400_000)
i2c.scan()
i2c.writeto(0x76, b"hi")
El mismo hardware también puede usarse en modo destino (esclavo) a través de machine.I2CTarget para exponer una región de memoria a otro controlador I²C:
from machine import I2CTarget
buf = bytearray(32)
target = I2CTarget(2, addr=0x42, mem=buf)
SPI¶
Bus |
MOSI |
MISO |
SCK |
CS |
|---|---|---|---|---|
SPI2 |
P0 |
P1 |
P2 |
P3 |
SPI4 |
P18 |
P17 |
P16 |
P15 |
from machine import SPI
from machine import Pin
spi = SPI(2, baudrate=10_000_000)
cs = Pin("P3", Pin.OUT, value=1) # CS is not driven by the SPI peripheral
cs.value(0)
spi.write(b"hello")
cs.value(1)
CAN¶
Bus |
TX |
RX |
|---|---|---|
CAN1 |
P2 |
P3 |
Nota
CAN aún no es compatible con esta placa en el firmware v5.0.0.
from machine import CAN
can = CAN(1, 500_000)
can.set_filters(None)
can.send(0x123, b"\xDE\xAD\xBE\xEF")
print(can.recv())
ADC¶
Ambos canales ADC pasan por un divisor de voltaje con búfer de amplificador operacional antes de llegar al MCU, por lo que read_u16() se mapea a un voltaje de entrada de fondo de escala diferente en cada pin.
Pin |
Fondo de escala |
Notas |
|---|---|---|
P6_ADC |
~3,3 V |
almohadilla de propósito general, conectada internamente a P6 |
BAT_ADC |
~5,0 V |
canal interno para la batería LiPo |
from machine import ADC
import time
adc = ADC("P6_ADC")
bat = ADC("BAT_ADC")
while True:
print("P6:", adc.read_u16() * 3.3 / 65535, "V")
print("BAT:", bat.read_u16() * 5.0 / 65535, "V")
time.sleep_ms(100)
PWM¶
Pin |
Temporizador / canal |
|---|---|
P4 |
TIM2 CH3 |
P5 |
TIM2 CH4 |
P6 |
TIM12 CH1 |
P7 |
TIM4 CH1 |
P8 |
TIM4 CH2 |
P9 |
TIM17 CH1 |
P10 |
TIM15 CH2 |
Controla cualquiera de ellos mediante machine.PWM:
from machine import Pin, PWM
pwm = PWM(Pin("P6"), freq=1_000, duty_u16=32768)
Buses por software (bit‑banged)¶
machine.SoftI2C y machine.SoftSPI funcionan en cualquier GPIO si necesitas un bus adicional.
Sensor térmico (externo)¶
El firmware incluye el controlador fir — controlador de sensor térmico (fir == infrarrojo lejano) para sensores térmicos cableados externamente:
MLX90621 — matriz IR de 16 × 4
MLX90640 — matriz IR de 32 × 24
MLX90641 — matriz IR de 16 × 12
AMG8833 — matriz IR de 8 × 8
Cablea el módulo al bus I²C de la placa y lee fotogramas con fir.init() + fir.snapshot():
import time
import image
import fir
fir.init() # auto‑detects the sensor
clock = time.clock()
while True:
clock.tick()
try:
img = fir.snapshot(x_scale=5, y_scale=5,
color_palette=image.PALETTE_IRONBOW,
hint=image.BICUBIC,
copy_to_fb=True)
except OSError:
continue
print(clock.fps())
El controlador fir solo se comunica con el sensor a través de I²C 2 — cablea el módulo a P4 (SCL) y P5 (SDA).
Temporización¶
time¶
El módulo time cubre los retardos bloqueantes, los ticks monotónicos y la medición de tiempo transcurrido:
import time
time.sleep(1) # seconds
time.sleep_ms(500)
time.sleep_us(10)
start = time.ticks_ms()
# ...do work...
elapsed = time.ticks_diff(time.ticks_ms(), start)
Temporizadores virtuales¶
machine.Timer programa funciones de retorno (callbacks) periódicas o de un solo disparo sin consumir una ranura de temporizador por hardware. Pasa -1 como id para usar un temporizador virtual (por software):
from machine import Timer
one_shot = Timer(-1)
one_shot.init(period=5_000, mode=Timer.ONE_SHOT,
callback=lambda t: print("once"))
periodic = Timer(-1)
periodic.init(period=2_000, mode=Timer.PERIODIC,
callback=lambda t: print("tick"))
Los valores de periodo están en milisegundos. Llama a deinit() para detenerlo y liberar la ranura.
Reloj en tiempo real¶
machine.RTC mantiene la hora del reloj de pared a través de los reinicios y (con la batería de respaldo opcional de 3,3 V conectada a las almohadillas traseras, consulta Pines de alimentación) a través de una pérdida total de alimentación:
from machine import RTC
rtc = RTC()
rtc.datetime((2026, 4, 30, 4, 12, 0, 0, 0)) # Y, M, D, weekday, h, m, s, subsec
print(rtc.datetime())
El RTC también funciona durante el sueño profundo, por lo que puedes usarlo como fuente de despertar para machine.deepsleep().
Watchdog¶
machine.WDT reinicia la placa si la aplicación se cuelga. Una vez iniciado no se puede detener ni reconfigurar — aliméntalo periódicamente dentro de tu bucle principal:
from machine import WDT
wdt = WDT(timeout=5_000) # 5 second window
while True:
# ...do work...
wdt.feed()
Información de arranque y de ejecución¶
Ventana del bootloader USB¶
En cada encendido, la cámara ejecuta un breve bootloader (unos segundos) que permite a OpenMV IDE actualizar el firmware sin que el usuario tenga que entrar en modo DFU. Una vez que expira la ventana, el bootloader cede el control a boot.py y luego a main.py.
Un script en ejecución puede volver a entrar en el bootloader bajo demanda llamando a machine.bootloader():
import machine
machine.bootloader()
Sistema de archivos y orden de arranque¶
El firmware de la N6 monta hasta tres sistemas de archivos al arrancar:
Flash interna — siempre montada en
/flash. Contienemain.pyyREADME.txtpor defecto; se crea en el primer arranque.Tarjeta microSD — si hay una tarjeta insertada, se monta en
/sdcard.ROMFS — sistema de archivos de solo lectura mapeado en memoria en
/romusado para distribuir grandes recursos de datos (por ejemplo, modelos de IA) que se benefician del acceso sin copia. MicroPython lo monta automáticamente al inicio, antes de que se ejecute cualquier Python de usuario.
Tras el montaje, el directorio de trabajo se establece en /sdcard cuando la tarjeta está presente, de lo contrario en /flash. El intérprete entonces ejecuta los scripts desde ese directorio:
boot.pyse ejecuta en cada reinicio suave (arranque en frío,Ctrl‑Ddesde el REPL, o cada vez que el script en ejecución retorna).main.pyse ejecuta solo en el arranque en frío, inmediatamente después deboot.py. Los reinicios suaves posteriores vuelven a ejecutarboot.pypero pasan directamente al REPL — para volver a ejecutarmain.pytienes que reiniciar completamente la placa.
Colocar un boot.py o main.py en la tarjeta SD anula la copia en flash sin tocarla — ambos archivos se buscan en el directorio de arranque (/sdcard cuando la tarjeta está montada, de lo contrario /flash).
El main.py por defecto que se incluye en una placa recién flasheada simplemente hace parpadear el canal azul del LED RGB de usuario a modo de latido (dos pulsos cortos, una pausa breve), de modo que puedes saber que el firmware arrancó correctamente sin ningún host conectado.
sys.path se extiende para incluir los tres sistemas de archivos y sus subdirectorios lib/, de modo que los módulos importables pueden residir en /flash/lib, /sdcard/lib o /rom/lib.
Para forzar al sistema a ignorar una tarjeta SD insertada (por ejemplo, para ejecutar el main.py de la flash incluso con una tarjeta presente), crea un archivo vacío llamado SKIPSD en la raíz de /flash.
Cuando está conectada por USB, el sistema de archivos de arranque (/sdcard si hay una tarjeta presente, de lo contrario /flash) también se enumera como una unidad de almacenamiento masivo USB en el host, lo que te permite editar boot.py, main.py y cualquier otro archivo directamente. Expulsa la unidad antes de reiniciar la cámara para que el host vacíe sus escrituras en caché.
Nota
Dado que el SO trata la unidad como un dispositivo de bloques pasivo, los archivos creados o modificados por el código que se ejecuta en la OpenMV Cam no aparecerán hasta que el host vuelva a montar la unidad. Si tanto el SO como la OpenMV Cam escriben en el mismo sistema de archivos al mismo tiempo, el SO ganará y sobrescribirá los cambios realizados por la cámara. Usa la tarjeta SD para cualquier dato que el script escriba de vuelta, y vuelve a montar antes de leer esos archivos desde el host.
Nota
El canal rojo del LED RGB de usuario puede encenderse brevemente mientras el host lee o escribe en la unidad de almacenamiento masivo USB — esto es un indicador de actividad gestionado por el firmware, no un fallo.
Tamaños de almacenamiento¶
La N6 viene con:
/flash— sistema de archivos FAT de 4 MB, lectura/escritura./rom— ROMFS de solo lectura mapeado en memoria de 24 MB, usado para distribuir scripts y modelos de ML que se benefician del acceso mmap sin copia./sdcard— el tamaño completo de la tarjeta microSD insertada (cuando está presente), lectura/escritura.
Indicador de fallo grave (hard fault)¶
Si el LED RGB de usuario está recorriendo rápidamente todos los colores — lo bastante rápido como para que tienda a parecer un LED blanco parpadeante en lugar de tonos distintos — el firmware ha encontrado un fallo grave irrecuperable. Reflashea el firmware para recuperarlo; si reflashear no ayuda, la placa podría estar dañada físicamente.
Bibliotecas de software¶
Consulta el índice de la biblioteca para ver la lista completa de módulos — incluidos los que son exclusivos de la versión para la N6.