OpenMV Cam H7¶
L’OpenMV Cam H7 est une carte de vision industrielle Cortex‑M7 construite autour du STMicroelectronics STM32H743 cadencé à 480 MHz, avec 1 Mo de SRAM interne, 2 Mo de mémoire flash interne et un codec JPEG matériel. La carte est livrée en deux révisions de capteur — la H7 avec l”OV7725 et la H7 R2 avec le ON Semi MT9M114 — mais le micrologiciel, le brochage et l’API Python sont identiques.

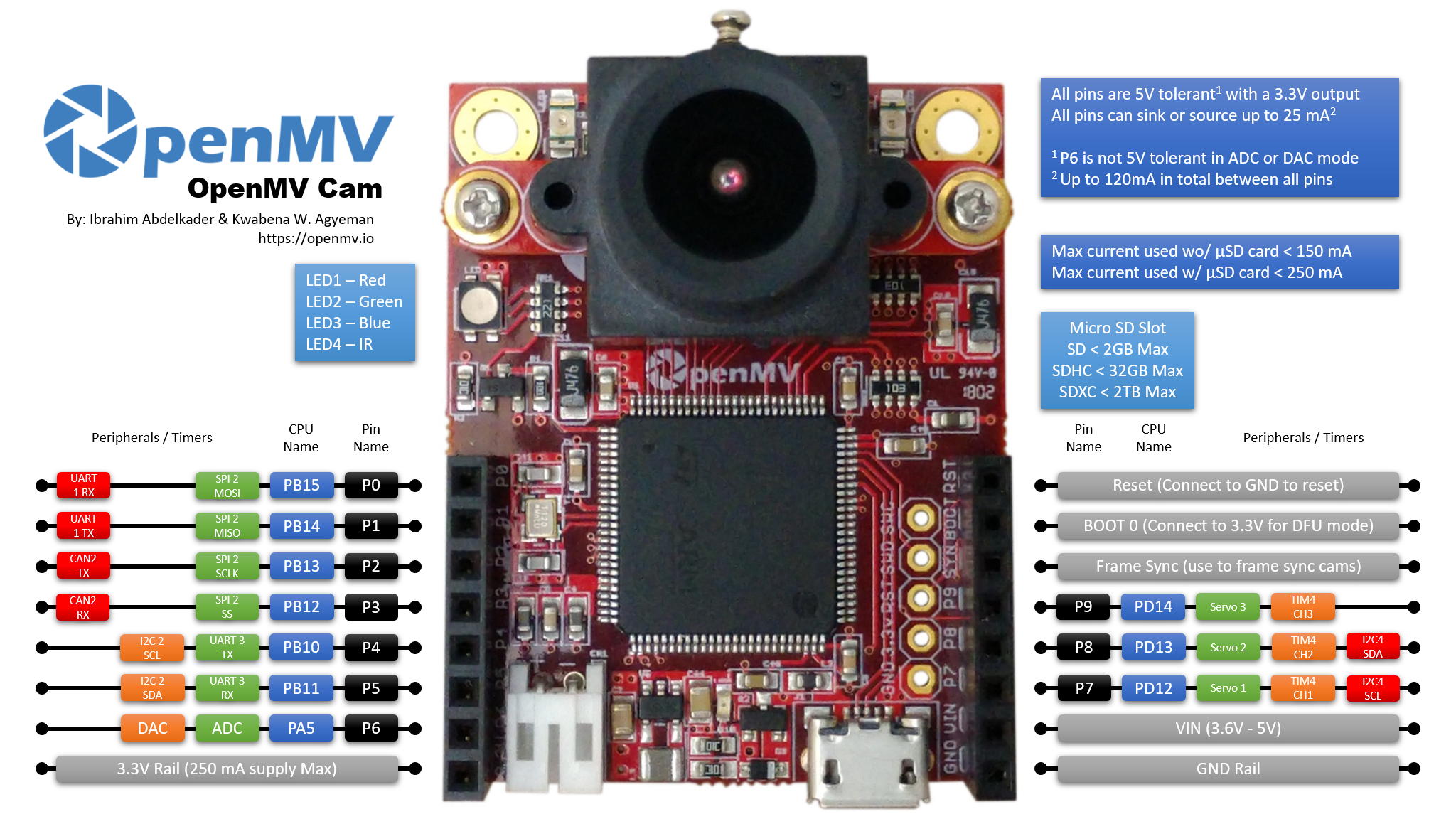
Pour la fiche technique complète, les photos et les dimensions, consultez la page produit de l’OpenMV Cam H7.
Points forts¶
STMicroelectronics STM32H743 Cortex‑M7 à 480 MHz (1027 DMIPS).
Encodeur/décodeur JPEG matériel.
1 Mo de SRAM interne — pas de SDRAM externe.
2 Mo de mémoire flash interne (pas de mémoire flash QSPI externe).
Capteur OV7725 (ou MT9M114 sur la H7 R2).
USB pleine vitesse (12 Mb/s) — apparaît comme VCP + stockage de masse USB pour l’hôte.
Connecteur microSD — SD jusqu’à 2 Go, SDHC jusqu’à 32 Go, SDXC jusqu’à 2 To.
Connecteur de batterie LiPo (pas de chargeur intégré — fournissez une cellule chargée ou alimentez via VIN/USB).
10 broches d’E/S, tolérantes 5 V avec sortie 3,3 V, 25 mA par broche (120 mA au total sur le connecteur), capables d’interruption. P6 n’est pas tolérante 5 V lorsqu’elle est utilisée en mode ADC ou DAC.
LED RGB utilisateur et deux LED IR 850 nm haute puissance pour un éclairage actif en vision en faible luminosité.
Note
La H7 ne possède aucune puce de gestion d’alimentation intégrée : il n’y a pas de chargeur de batterie, pas d’ADC de tension de batterie, pas de LED de charge / d’état d’alimentation, et pas de bouton d’alimentation matériel. Connectez une batterie LiPo préchargée au connecteur JST de batterie ou alimentez la carte via USB / VIN.
Brochage¶
Référence des broches¶
Nom de la broche |
Fonction |
|---|---|
P0 |
UART1 RX / SPI2 MOSI |
P1 |
UART1 TX / SPI2 MISO |
P2 |
SPI2 SCK / FDCAN2 TX |
P3 |
SPI2 NSS (CS) / FDCAN2 RX |
P4 |
I2C2 SCL / UART3 TX / TIM2 CH3 |
P5 |
I2C2 SDA / UART3 RX / TIM2 CH4 |
P6 |
ADC / DAC / TIM2 CH1 |
P7 |
I2C4 SCL / TIM4 CH1 |
P8 |
I2C4 SDA / TIM4 CH2 |
P9 |
TIM4 CH3 |
RESET |
reliez à GND pour réinitialiser la carte |
SYN |
pastille de synchronisation de trame — câblée uniquement au capteur de la caméra |
BOOT0 |
reliez à 3,3 V à la mise sous tension pour le programme d’amorçage DFU / ROM |
LED_RED |
canal rouge de la LED RGB (actif à l’état bas) |
LED_GREEN |
canal vert de la LED RGB (actif à l’état bas) |
LED_BLUE |
canal bleu de la LED RGB (actif à l’état bas) |
LED_IR |
LED IR haute puissance (les deux canaux pilotés ensemble) |
Note
La pastille SYN du connecteur est reliée directement à la ligne de déclenchement / d’exposition du capteur de la caméra — elle n’est pas routée vers le MCU sur la H7. Pilotez-la ou lisez-la de manière externe ; vous ne pouvez pas la basculer depuis MicroPython.
Broches d’alimentation¶
3.3V — rail régulé à 3,3 V. Jusqu’à 250 mA disponibles pour les shields (moins si la carte microSD est utilisée). Contrairement aux caméras plus récentes, cette broche est bidirectionnelle — voir l’avertissement ci-dessous.
VIN — entrée 3,6 – 5 V. Alimente la carte à travers le régulateur intégré.
GND — masse commune.
Un connecteur LiPo 3,7 V est également présent, mais la H7 ne dispose pas de chargeur de batterie — connectez une cellule préchargée, ou fournissez plutôt VIN / USB.
Note
Lorsque l’USB et le VIN/LiPo sont présents en même temps, l’entrée VIN/LiPo l’emporte — le commutateur d’alimentation intégré la privilégie par rapport à l’USB pour alimenter la carte.
Avertissement
Le connecteur de batterie et le VIN sont reliés ensemble sur la H7. Ne branchez pas une batterie LiPo et n’appliquez pas le VIN en même temps — les deux alimentations entreraient en conflit et pourraient endommager la batterie, la carte, ou les deux.
Avertissement
Vous pouvez alimenter la H7 en fournissant 3,3 V directement sur la broche 3.3V si vous ne voulez pas passer par le régulateur intégré. Dans ce cas, n’appliquez pas non plus le VIN ou l’alimentation USB en même temps — alimenter le régulateur à contre-courant pendant qu’une autre source est active peut endommager et détruire définitivement la caméra.
Astuce
Utilisez l”estimateur d’autonomie de batterie pour modéliser combien de temps la H7 fonctionnera sur batterie pour un cycle de service actif / veille profonde donné.
Broches de récupération et de débogage¶
RESET — reliez à GND pour réinitialiser la carte. La relâcher laisse le MCU démarrer normalement.
BOOT0 — reliez à 3,3 V pendant la mise sous tension de la carte pour entrer dans le programme d’amorçage ROM du STM32 (mode DFU). OpenMV IDE utilise ce mode pour reflasher le programme d’amorçage intégré.
La carte expose un connecteur de débogage SWD (RST / SWCLK / SWDIO) à côté du connecteur GPIO, compatible avec les adaptateurs ST‑LINK et SEGGER J‑Link.
Périphériques intégrés¶
LED¶
La H7 possède une seule LED RGB utilisateur ainsi qu’une paire de LED IR 850 nm haute puissance :
LED RGB utilisateur — pilotable par logiciel, exposée sous les noms
LED_RED,LED_GREENetLED_BLUEfrom machine import LED LED("LED_RED").on() LED("LED_GREEN").on() LED("LED_BLUE").on()
LED IR — les deux LED sont pilotées ensemble via la broche
LED_IR.LED_IRest câblée active à l’état haut au niveau matériel, alors que le micrologiciel traite toutes les autres LED intégrées comme actives à l’état bas, utilisez donclow()/high()plutôt queon()/off()(qui inverseraient le sens)from machine import LED ir = LED("LED_IR") ir.low() # turn IR illumination ON ir.high() # turn IR illumination OFF
Capteur de la caméra¶
L’OV7725 (ou le MT9M114 sur la H7 R2) est piloté via le module csi — capteurs de caméra
import csi
cam = csi.CSI()
cam.reset()
cam.pixformat(csi.RGB565)
cam.framesize(csi.QVGA)
cam.snapshot(time=2000) # let auto‑exposure settle
while True:
img = cam.snapshot()
Le capteur repose sur un module amovible — remplacez-le par n’importe quel autre module de caméra OpenMV (obturateur global, thermique, résolution supérieure, etc.) sans modifier le reste de la carte.
Carte microSD¶
Lorsqu’une carte est insérée, elle est montée automatiquement sur /sdcard et est utilisable via le système de fichiers habituel
import os
for entry in os.listdir("/sdcard"):
print(entry)
Référence des bus¶
GPIO¶
Utilisez machine.Pin pour lire ou piloter n’importe quelle broche sérigraphiée. Les sorties sont en CMOS 3,3 V, tolérantes 5 V côté entrée, et peuvent absorber/fournir jusqu’à 25 mA par broche (120 mA au total sur l’ensemble du connecteur).
from machine import Pin
out = Pin("P0", Pin.OUT)
out.on()
out.off()
out.value(1)
inp = Pin("P1", Pin.IN, Pin.PULL_UP)
print(inp.value())
Toute broche d’entrée peut également déclencher une interruption sur les transitions de front
def handler(pin):
print("triggered:", pin)
Pin("P1", Pin.IN, Pin.PULL_UP).irq(
handler, Pin.IRQ_FALLING | Pin.IRQ_RISING,
)
UART¶
Bus |
TX |
RX |
|---|---|---|
UART1 |
P1 |
P0 |
UART3 |
P4 |
P5 |
from machine import UART
uart = UART(3, baudrate=115200)
uart.write("hello")
uart.read(5)
I²C¶
Bus |
SCL |
SDA |
|---|---|---|
I2C2 |
P4 |
P5 |
I2C4 |
P7 |
P8 |
from machine import I2C
i2c = I2C(2, freq=400_000)
i2c.scan()
i2c.writeto(0x76, b"hi")
Le même matériel peut aussi être utilisé en mode cible (esclave) via machine.I2CTarget pour exposer une région mémoire à un autre contrôleur I²C
from machine import I2CTarget
buf = bytearray(32)
target = I2CTarget(2, addr=0x42, mem=buf)
SPI¶
Bus |
MOSI |
MISO |
SCK |
CS |
|---|---|---|---|---|
SPI2 |
P0 |
P1 |
P2 |
P3 |
from machine import SPI
from machine import Pin
spi = SPI(2, baudrate=10_000_000)
cs = Pin("P3", Pin.OUT, value=1) # CS is not driven by the SPI peripheral
cs.value(0)
spi.write(b"hello")
cs.value(1)
CAN (FDCAN)¶
Bus |
TX |
RX |
|---|---|---|
FDCAN2 |
P2 |
P3 |
from machine import CAN
can = CAN(2, 500_000)
can.set_filters(None)
can.send(0x123, b"\xDE\xAD\xBE\xEF")
print(can.recv())
ADC et DAC¶
P6 est la seule broche analogique utilisateur. Elle peut être utilisée soit comme entrée ADC 12 bits, soit comme sortie DAC.
ADC — pleine échelle à 3,3 V sur la broche
from machine import ADC import time adc = ADC("P6") while True: voltage = adc.read_u16() * 3.3 / 65535 print(voltage) time.sleep_ms(100)
DAC — via
pyb.DAC. La valeur sur 8 bits couvre 0–3,3 Vfrom pyb import DAC dac = DAC("P6") voltage = 1.65 dac.write(int(voltage / 3.3 * 255))
En mode ADC ou DAC, P6 est tolérante 3,3 V uniquement — ne lui appliquez pas 5 V.
PWM¶
Broche |
Minuteur / canal |
|---|---|
P4 |
TIM2 CH3 |
P5 |
TIM2 CH4 |
P6 |
TIM2 CH1 |
P7 |
TIM4 CH1 |
P8 |
TIM4 CH2 |
P9 |
TIM4 CH3 |
Note
TIM1 est réservé par le micrologiciel pour générer l’horloge pixel du capteur de la caméra, de sorte que les canaux TIM1 physiquement présents sur P0/P1/P2 ne peuvent pas être utilisés pour du PWM utilisateur sans casser la caméra.
TIM4 est partagé avec pyb.Servo — instancier un servo reconfigure l’ensemble du minuteur pour un fonctionnement à 50 Hz, ne mélangez donc pas machine.PWM sur P7/P8/P9 avec pyb.Servo dans le même script.
Pilotez n’importe lequel d’entre eux via machine.PWM
from machine import Pin, PWM
pwm = PWM(Pin("P7"), freq=1_000, duty_u16=32768)
Bus logiciels en bit-banging¶
machine.SoftI2C et machine.SoftSPI fonctionnent sur n’importe quel GPIO si vous avez besoin d’un bus supplémentaire.
Capteur thermique (externe)¶
Le micrologiciel inclut le pilote fir — pilote de capteur thermique (fir == infrarouge lointain) pour les imageurs thermiques câblés en externe :
MLX90621 — matrice IR 16 × 4
MLX90640 — matrice IR 32 × 24
MLX90641 — matrice IR 16 × 12
AMG8833 — matrice IR 8 × 8
Câblez le module sur le bus I²C de la carte et lisez les trames avec fir.init() + fir.snapshot()
import time
import image
import fir
fir.init() # auto‑detects the sensor
clock = time.clock()
while True:
clock.tick()
try:
img = fir.snapshot(x_scale=5, y_scale=5,
color_palette=image.PALETTE_IRONBOW,
hint=image.BICUBIC,
copy_to_fb=True)
except OSError:
continue
print(clock.fps())
Le pilote fir ne communique avec le capteur que via I²C 2 — câblez le module sur P4 (SCL) et P5 (SDA).
Temporisation¶
time¶
Le module time couvre les délais bloquants, les tics monotones et la mesure du temps écoulé
import time
time.sleep(1) # seconds
time.sleep_ms(500)
time.sleep_us(10)
start = time.ticks_ms()
# ...do work...
elapsed = time.ticks_diff(time.ticks_ms(), start)
Minuteurs virtuels¶
machine.Timer planifie des fonctions de rappel périodiques ou à déclenchement unique sans consommer d’emplacement de minuteur matériel. Passez -1 comme identifiant pour utiliser un minuteur virtuel (logiciel)
from machine import Timer
one_shot = Timer(-1)
one_shot.init(period=5_000, mode=Timer.ONE_SHOT,
callback=lambda t: print("once"))
periodic = Timer(-1)
periodic.init(period=2_000, mode=Timer.PERIODIC,
callback=lambda t: print("tick"))
Les valeurs de période sont en millisecondes. Appelez deinit() pour arrêter et libérer l’emplacement.
Horloge en temps réel¶
machine.RTC conserve l’heure de l’horloge murale d’une réinitialisation à l’autre
from machine import RTC
rtc = RTC()
rtc.datetime((2026, 4, 30, 4, 12, 0, 0, 0)) # Y, M, D, weekday, h, m, s, subsec
print(rtc.datetime())
Chien de garde¶
machine.WDT réinitialise la carte si l’application se bloque. Une fois démarré, il ne peut plus être arrêté ni reconfiguré — alimentez-le périodiquement dans votre boucle principale
from machine import WDT
wdt = WDT(timeout=5_000) # 5 second window
while True:
# ...do work...
wdt.feed()
Informations sur le démarrage et l’exécution¶
Fenêtre du programme d’amorçage USB¶
À chaque mise sous tension, la caméra exécute un court programme d’amorçage (quelques secondes) qui permet à OpenMV IDE de mettre à jour le micrologiciel sans que l’utilisateur ait à entrer en mode DFU. Une fois la fenêtre expirée, le programme d’amorçage passe la main à boot.py puis à main.py.
Un script en cours d’exécution peut ré-entrer dans le programme d’amorçage à la demande en appelant machine.bootloader()
import machine
machine.bootloader()
Système de fichiers et ordre de démarrage¶
Le micrologiciel de la H7 monte jusqu’à trois systèmes de fichiers au démarrage :
Mémoire flash interne — toujours montée sur
/flash. Contientmain.pyetREADME.txtpar défaut ; créée lors du tout premier démarrage.Carte microSD — si une carte est insérée, elle est montée sur
/sdcard.ROMFS — système de fichiers en lecture seule mappé en mémoire sur
/rom, utilisé pour embarquer de grands actifs de données (par exemple des modèles d’IA) qui bénéficient d’un accès sans copie. Monté automatiquement par MicroPython au démarrage, avant l’exécution de tout code Python utilisateur.
Après le montage, le répertoire de travail est positionné sur /sdcard lorsque la carte est présente, sinon sur /flash. L’interpréteur exécute ensuite les scripts depuis ce répertoire :
boot.pyest exécuté à chaque réinitialisation logicielle (démarrage à froid,Ctrl‑Ddepuis le REPL, ou chaque fois que le script en cours se termine).main.pyest exécuté uniquement au démarrage à froid, immédiatement aprèsboot.py. Les réinitialisations logicielles ultérieures ré-exécutentboot.pymais passent directement au REPL — pour ré-exécutermain.pyvous devez réinitialiser complètement la carte.
Déposer un boot.py ou un main.py sur la carte SD remplace la copie en mémoire flash sans y toucher — les deux fichiers sont recherchés dans le répertoire de démarrage (/sdcard lorsque la carte est montée, sinon /flash).
Le main.py par défaut livré sur une carte fraîchement flashée se contente de faire clignoter le canal bleu de la LED RGB utilisateur comme battement de cœur (deux brèves impulsions, courte pause), ce qui vous permet de savoir que le micrologiciel a démarré correctement sans aucun hôte connecté.
sys.path est étendu pour inclure les trois systèmes de fichiers et leurs sous-répertoires lib/, de sorte que les modules importables peuvent résider dans /flash/lib, /sdcard/lib ou /rom/lib.
Pour forcer le système à ignorer une carte SD insérée (par exemple pour exécuter le main.py de la mémoire flash même en présence d’une carte), créez un fichier vide nommé SKIPSD à la racine de /flash.
Lorsqu’elle est connectée en USB, le système de fichiers de démarrage (/sdcard si une carte est présente, sinon /flash) s’énumère aussi comme un lecteur de stockage de masse USB sur l’hôte, vous permettant d’éditer boot.py, main.py et tout autre fichier directement. Éjectez le lecteur avant de réinitialiser la caméra afin que l’hôte vide ses écritures en cache.
Note
Comme le système d’exploitation traite le lecteur comme un périphérique de blocs passif, les fichiers créés ou modifiés par le code exécuté sur l’OpenMV Cam n’apparaîtront pas tant que l’hôte n’a pas remonté le lecteur. Si le système d’exploitation et l’OpenMV Cam écrivent dans le même système de fichiers en même temps, le système d’exploitation l’emporte et écrase les modifications faites par la caméra. Utilisez la carte SD pour toutes les données que le script réécrit, et remontez le lecteur avant de lire ces fichiers depuis l’hôte.
Note
Le canal rouge de la LED RGB utilisateur peut s’allumer brièvement pendant que l’hôte lit ou écrit sur le lecteur de stockage de masse USB — il s’agit d’un indicateur d’activité piloté par le micrologiciel, pas d’un défaut.
Tailles de stockage¶
La H7 est livrée avec :
/flash— système de fichiers FAT de 128 Ko, en lecture/écriture./rom— ROMFS de 128 Ko en lecture seule mappé en mémoire./sdcard— taille complète de la carte microSD insérée (lorsqu’elle est présente), en lecture/écriture.
Indicateur de panne grave (hard fault)¶
Si la LED RGB utilisateur défile rapidement à travers toutes les couleurs — assez vite pour qu’elle ait tendance à ressembler à une LED blanche scintillante plutôt qu’à des teintes distinctes — le micrologiciel a rencontré une panne grave irrécupérable. Reflashez le micrologiciel pour récupérer ; si reflasher n’aide pas, la carte peut être physiquement endommagée.
Bibliothèques logicielles¶
Consultez l”index des bibliothèques pour la liste complète des modules — y compris ceux qui sont propres à la version H7.