OpenMV Cam H7¶
OpenMV Cam H7 är ett Cortex‑M7-kort för maskinseende byggt kring STMicroelectronics STM32H743 på 480 MHz med 1 MB internt SRAM, 2 MB internt flashminne och en JPEG-hårdvarukodek. Kortet levereras i två sensorrevisioner — H7 med OV7725 och H7 R2 med ON Semi MT9M114 — men den fasta programvaran, stiftkartan och Python-API:et är identiska.

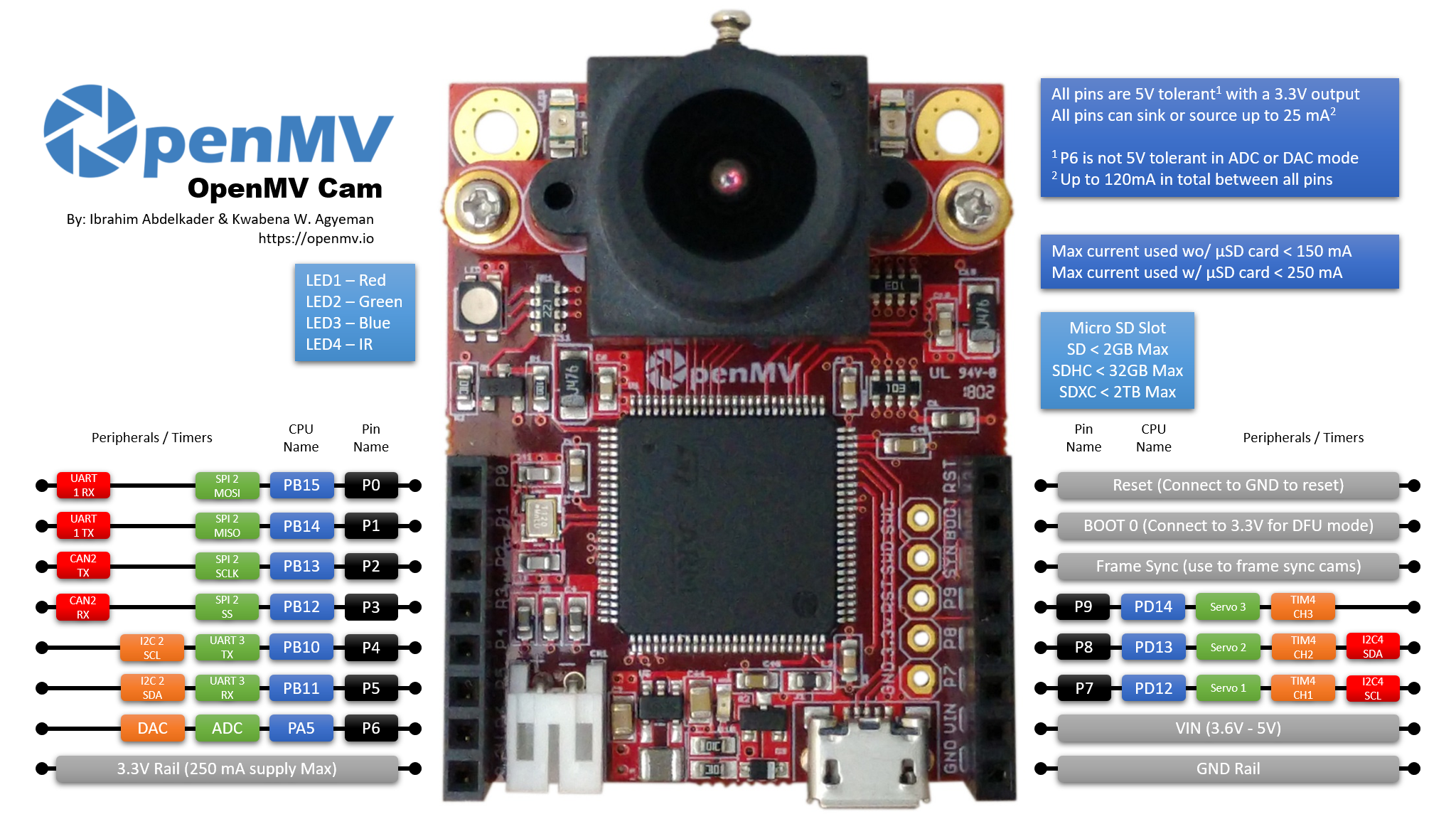
För fullständigt datablad, foton och mått, se produktsidan för OpenMV Cam H7.
Höjdpunkter¶
STMicroelectronics STM32H743 Cortex‑M7 på 480 MHz (1027 DMIPS).
JPEG-kodare/avkodare i hårdvara.
1 MB internt SRAM — inget externt SDRAM.
2 MB internt flashminne (inget externt QSPI-flashminne).
OV7725-sensor (eller MT9M114 på H7 R2).
Full‑speed USB (12 Mb/s) — visas som VCP + USB-masslagring för värddatorn.
microSD-uttag — SD upp till 2 GB, SDHC upp till 32 GB, SDXC upp till 2 TB.
LiPo-batterikontakt (ingen inbyggd laddare — anslut en laddad cell eller driv från VIN/USB).
10 I/O-stift, 5 V-toleranta med 3,3 V-utgång, 25 mA per stift (120 mA totalt över stiftlisten), avbrottskapabla. P6 är inte 5 V-tolerant när det används i ADC- eller DAC-läge.
RGB-LED för användaren och två högeffekts-IR-LED på 850 nm för aktiv belysning vid seende i svagt ljus.
Anteckning
H7 har inget inbyggt strömhanteringschip: det finns ingen batteriladdare, ingen ADC för batterispänning, inga LED:ar för laddning / strömstatus och ingen hårdvaruströmknapp. Anslut ett förladdat LiPo-batteri till batteri-JST:et eller driv kortet från USB / VIN.
Stiftkarta¶
Stiftreferens¶
Stiftnamn |
Funktion |
|---|---|
P0 |
UART1 RX / SPI2 MOSI |
P1 |
UART1 TX / SPI2 MISO |
P2 |
SPI2 SCK / FDCAN2 TX |
P3 |
SPI2 NSS (CS) / FDCAN2 RX |
P4 |
I2C2 SCL / UART3 TX / TIM2 CH3 |
P5 |
I2C2 SDA / UART3 RX / TIM2 CH4 |
P6 |
ADC / DAC / TIM2 CH1 |
P7 |
I2C4 SCL / TIM4 CH1 |
P8 |
I2C4 SDA / TIM4 CH2 |
P9 |
TIM4 CH3 |
RESET |
dra till GND för att återställa kortet |
SYN |
bildrute‑synk-pad — kopplad endast till kamerasensorn |
BOOT0 |
dra till 3,3 V vid påslag för DFU / ROM-startladdare |
LED_RED |
RGB-LED:ens röda kanal (aktiv låg) |
LED_GREEN |
RGB-LED:ens gröna kanal (aktiv låg) |
LED_BLUE |
RGB-LED:ens blå kanal (aktiv låg) |
LED_IR |
högeffekts-IR-LED:ar (båda kanalerna drivs tillsammans) |
Anteckning
SYN-paden på stiftlisten är ansluten direkt till kamerasensorns trigger- / exponeringslinje — den dirigeras inte till MCU:n på H7. Driv eller läs den externt; du kan inte växla den från MicroPython.
Strömstift¶
3.3V — reglerad 3,3 V-skena. Upp till 250 mA tillgängligt för shields (mindre om microSD-kortet används). Till skillnad från de nyare kamerorna är detta stift dubbelriktat — se varningen nedan.
VIN — 3,6 – 5 V-ingång. Driver kortet genom den inbyggda regulatorn.
GND — gemensam jord.
En 3,7 V LiPo-kontakt finns också, men H7 har ingen batteriladdare — anslut en förladdad cell, eller mata VIN / USB i stället.
Anteckning
När både USB och VIN/LiPo finns närvarande vinner VIN/LiPo-ingången — den inbyggda strömväljaren väljer den framför USB för att driva kortet.
Varning
Batterikontakten och VIN är sammankopplade på H7. Anslut inte ett LiPo-batteri och mata VIN samtidigt — de två strömkällorna kommer att motverka varandra och kan skada batteriet, kortet, eller båda.
Varning
Du får driva H7 genom att mata 3,3 V direkt in i 3.3V-stiftet om du inte vill gå via den inbyggda regulatorn. I så fall, mata inte också VIN eller USB-ström samtidigt — att backmata regulatorn medan en annan strömkälla är aktiv kan permanent skada och förstöra kameran.
Tips
Använd batterilivslängdsuppskattaren för att modellera hur länge H7 kan köra på batteri för en given arbetscykel med aktivt / djupt sömnläge.
Återställnings- och felsökningsstift¶
RESET — dra till GND för att återställa kortet. Att släppa det låter MCU:n starta upp normalt.
BOOT0 — dra till 3,3 V medan kortet matas för att gå in i STM32 ROM-startladdaren (DFU-läge). OpenMV IDE använder detta läge för att flasha om den inbyggda startladdaren.
Kortet exponerar en SWD-felsökningslist (RST / SWCLK / SWDIO) bredvid GPIO-listen, kompatibel med ST‑LINK- och SEGGER J‑Link-adaptrar.
Inbyggd kringutrustning¶
LED:ar¶
H7 har en enda RGB-LED för användaren plus ett par högeffekts-IR-LED:ar på 850 nm:
RGB-LED för användaren — mjukvarustyrbar, exponerad som
LED_RED,LED_GREENochLED_BLUEfrom machine import LED LED("LED_RED").on() LED("LED_GREEN").on() LED("LED_BLUE").on()
IR-LED:ar — båda LED:arna drivs tillsammans genom
LED_IR-stiftet.LED_IRär kopplad aktiv hög i hårdvaran medan den fasta programvaran behandlar alla andra inbyggda LED:ar som aktiva låga, så användlow()/high()snarare änon()/off()(som skulle invertera betydelsen):from machine import LED ir = LED("LED_IR") ir.low() # turn IR illumination ON ir.high() # turn IR illumination OFF
Kamerasensor¶
OV7725 (eller MT9M114 på H7 R2) drivs genom modulen csi — kamerasensorer
import csi
cam = csi.CSI()
cam.reset()
cam.pixformat(csi.RGB565)
cam.framesize(csi.QVGA)
cam.snapshot(time=2000) # let auto‑exposure settle
while True:
img = cam.snapshot()
Sensorn sitter på en avtagbar modul — byt ut den mot någon av de andra OpenMV-kameramodulerna (global slutare, termisk, högre upplösning osv.) utan att ändra resten av kortet.
microSD-kort¶
När ett kort är insatt monteras det automatiskt på /sdcard och kan användas genom det vanliga filsystemet:
import os
for entry in os.listdir("/sdcard"):
print(entry)
Bussreferens¶
GPIO¶
Använd machine.Pin för att läsa eller driva något av de tryckta stiften. Utgångar är 3,3 V CMOS, 5 V-toleranta på ingångssidan och kan sänka/källa upp till 25 mA per stift (120 mA totalt över hela stiftlisten).
from machine import Pin
out = Pin("P0", Pin.OUT)
out.on()
out.off()
out.value(1)
inp = Pin("P1", Pin.IN, Pin.PULL_UP)
print(inp.value())
Vilket ingångsstift som helst kan också utlösa ett avbrott vid flankövergångar:
def handler(pin):
print("triggered:", pin)
Pin("P1", Pin.IN, Pin.PULL_UP).irq(
handler, Pin.IRQ_FALLING | Pin.IRQ_RISING,
)
UART¶
Buss |
TX |
RX |
|---|---|---|
UART1 |
P1 |
P0 |
UART3 |
P4 |
P5 |
from machine import UART
uart = UART(3, baudrate=115200)
uart.write("hello")
uart.read(5)
I²C¶
Buss |
SCL |
SDA |
|---|---|---|
I2C2 |
P4 |
P5 |
I2C4 |
P7 |
P8 |
from machine import I2C
i2c = I2C(2, freq=400_000)
i2c.scan()
i2c.writeto(0x76, b"hi")
Samma hårdvara kan också användas i mållägge (slavläge) genom machine.I2CTarget för att exponera ett minnesområde för en annan I²C-styrenhet:
from machine import I2CTarget
buf = bytearray(32)
target = I2CTarget(2, addr=0x42, mem=buf)
SPI¶
Buss |
MOSI |
MISO |
SCK |
CS |
|---|---|---|---|---|
SPI2 |
P0 |
P1 |
P2 |
P3 |
from machine import SPI
from machine import Pin
spi = SPI(2, baudrate=10_000_000)
cs = Pin("P3", Pin.OUT, value=1) # CS is not driven by the SPI peripheral
cs.value(0)
spi.write(b"hello")
cs.value(1)
CAN (FDCAN)¶
Buss |
TX |
RX |
|---|---|---|
FDCAN2 |
P2 |
P3 |
from machine import CAN
can = CAN(2, 500_000)
can.set_filters(None)
can.send(0x123, b"\xDE\xAD\xBE\xEF")
print(can.recv())
ADC och DAC¶
P6 är det enda analoga stiftet för användaren. Det kan användas antingen som en 12‑bitars ADC-ingång eller en DAC-utgång.
ADC — fullskala vid 3,3 V på stiftet:
from machine import ADC import time adc = ADC("P6") while True: voltage = adc.read_u16() * 3.3 / 65535 print(voltage) time.sleep_ms(100)
DAC — genom
pyb.DAC. Det 8‑bitars värdet täcker 0–3,3 V:from pyb import DAC dac = DAC("P6") voltage = 1.65 dac.write(int(voltage / 3.3 * 255))
I ADC- eller DAC-läge är P6 endast 3,3 V-tolerant — mata det inte med 5 V.
PWM¶
Stift |
Timer / kanal |
|---|---|
P4 |
TIM2 CH3 |
P5 |
TIM2 CH4 |
P6 |
TIM2 CH1 |
P7 |
TIM4 CH1 |
P8 |
TIM4 CH2 |
P9 |
TIM4 CH3 |
Anteckning
TIM1 är reserverad av den fasta programvaran för att generera kamerasensorns pixelklocka, så TIM1-kanalerna som fysiskt finns på P0/P1/P2 kan inte användas för användar-PWM utan att kameran slutar fungera.
TIM4 delas med pyb.Servo — att instansiera en servo omkonfigurerar hela timern för 50 Hz-drift, så blanda inte machine.PWM på P7/P8/P9 med pyb.Servo i samma skript.
Driv vilken som helst av dem via machine.PWM
from machine import Pin, PWM
pwm = PWM(Pin("P7"), freq=1_000, duty_u16=32768)
Mjukvaru-bit‑bangade bussar¶
machine.SoftI2C och machine.SoftSPI fungerar på vilken GPIO som helst om du behöver en extra buss.
Termisk sensor (extern)¶
Den fasta programvaran inkluderar drivrutinen fir — drivrutin för värmesensor (fir == far infrared) för externt kopplade termiska bildtagare:
MLX90621 — 16 × 4 IR-array
MLX90640 — 32 × 24 IR-array
MLX90641 — 16 × 12 IR-array
AMG8833 — 8 × 8 IR-array
Koppla modulen till kortets I²C-buss och läs bildrutor med fir.init() + fir.snapshot()
import time
import image
import fir
fir.init() # auto‑detects the sensor
clock = time.clock()
while True:
clock.tick()
try:
img = fir.snapshot(x_scale=5, y_scale=5,
color_palette=image.PALETTE_IRONBOW,
hint=image.BICUBIC,
copy_to_fb=True)
except OSError:
continue
print(clock.fps())
fir-drivrutinen kommunicerar med sensorn endast över I²C 2 — koppla modulen till P4 (SCL) och P5 (SDA).
Tidshantering¶
time¶
Modulen time täcker blockerande fördröjningar, monotona tick och mätning av förfluten tid:
import time
time.sleep(1) # seconds
time.sleep_ms(500)
time.sleep_us(10)
start = time.ticks_ms()
# ...do work...
elapsed = time.ticks_diff(time.ticks_ms(), start)
Virtuella timrar¶
machine.Timer schemalägger periodiska eller engångs-återanrop utan att förbruka en hårdvarutimerplats. Skicka -1 som id för att använda en virtuell (mjukvaru-) timer:
from machine import Timer
one_shot = Timer(-1)
one_shot.init(period=5_000, mode=Timer.ONE_SHOT,
callback=lambda t: print("once"))
periodic = Timer(-1)
periodic.init(period=2_000, mode=Timer.PERIODIC,
callback=lambda t: print("tick"))
Periodvärden anges i millisekunder. Anropa deinit() för att stoppa och frigöra platsen.
Realtidsklocka¶
machine.RTC håller väggklockstid över återställningar:
from machine import RTC
rtc = RTC()
rtc.datetime((2026, 4, 30, 4, 12, 0, 0, 0)) # Y, M, D, weekday, h, m, s, subsec
print(rtc.datetime())
Vakthund¶
machine.WDT återställer kortet om applikationen hänger sig. När den väl startats kan den inte stoppas eller omkonfigureras — mata den periodiskt inuti din huvudloop:
from machine import WDT
wdt = WDT(timeout=5_000) # 5 second window
while True:
# ...do work...
wdt.feed()
Start- och körtidsinformation¶
USB-startladdarfönster¶
Vid varje påslag kör kameran en kort startladdare (några sekunder) som låter OpenMV IDE uppdatera den fasta programvaran utan att användaren behöver gå in i DFU-läge. När fönstret löper ut lämnar startladdaren över till boot.py och sedan main.py.
Ett körande skript kan återinträda i startladdaren på begäran genom att anropa machine.bootloader()
import machine
machine.bootloader()
Filsystem och startordning¶
H7-firmwaren monterar upp till tre filsystem vid start:
Internt flashminne — alltid monterat på
/flash. Innehållermain.pyochREADME.txtsom standard; skapas vid allra första starten.microSD-kort — om ett kort är insatt monteras det på
/sdcard.ROMFS — skrivskyddat, minnesmappat filsystem på
/romsom används för att leverera stora datatillgångar (t.ex. AI-modeller) som gynnas av nollkopieringsåtkomst. Monteras automatiskt av MicroPython vid uppstart, innan någon användar-Python körs.
Efter monteringen sätts arbetskatalogen till /sdcard när kortet är närvarande, annars /flash. Tolken kör sedan skript från den katalogen:
boot.pykörs vid varje mjuk återställning (kallstart,Ctrl‑Dfrån REPL:en, eller närhelst det körande skriptet returnerar).main.pykörs endast vid kallstart, omedelbart efterboot.py. Efterföljande mjuka återställningar kör omboot.pymen hoppar direkt till REPL:en — för att köra ommain.pymåste du återställa kortet helt.
Att lägga en boot.py eller main.py på SD-kortet åsidosätter kopian i flashminnet utan att röra den — båda filerna slås upp i startkatalogen (/sdcard när kortet är monterat, annars /flash).
Standard-main.py som levereras på ett nyflashat kort blinkar bara den blå kanalen på RGB-LED:en för användaren som ett hjärtslag (två korta pulser, kort paus), så att du kan se att firmwaren startade rent utan någon värd ansluten.
sys.path utökas till att inkludera alla tre filsystemen och deras lib/-underkataloger, så importerbara moduler kan ligga i /flash/lib, /sdcard/lib eller /rom/lib.
För att tvinga systemet att ignorera ett insatt SD-kort (till exempel för att köra main.py i flashminnet även med ett kort närvarande), skapa en tom fil med namnet SKIPSD i roten av /flash.
När den är ansluten över USB räknas även startfilsystemet (/sdcard om ett kort är närvarande, annars /flash) upp som en USB-masslagringsenhet på värden, vilket låter dig redigera boot.py, main.py och andra filer direkt. Mata ut enheten innan du återställer kameran så att värden spolar sina cachade skrivningar.
Anteckning
Eftersom operativsystemet behandlar enheten som en passiv blockenhet kommer filer som skapas eller ändras av kod som körs på OpenMV Cam inte att visas förrän värden monterar om enheten. Om både operativsystemet och OpenMV Cam skriver till samma filsystem samtidigt vinner operativsystemet och skriver över ändringar som gjorts av kameran. Använd SD-kortet för all data som skriptet skriver tillbaka, och montera om innan du läser dessa filer från värden.
Anteckning
Den röda kanalen på RGB-LED:en för användaren kan kortvarigt lysa upp medan värden läser från eller skriver till USB-masslagringsenheten — detta är en firmware-driven aktivitetsindikator, inte ett fel.
Lagringsstorlekar¶
H7 levereras med:
/flash— 128 KB FAT-filsystem, läs/skriv./rom— 128 KB skrivskyddat minnesmappat ROMFS./sdcard— full storlek på det microSD-kort som är insatt (när det är närvarande), läs/skriv.
Hårdfelsindikator¶
Om RGB-LED:en för användaren snabbt växlar genom alla färger — så snabbt att det tenderar att se ut som en glittrande vit LED snarare än distinkta nyanser — har den fasta programvaran träffat ett oåterkalleligt hårdfel. Flasha om den fasta programvaran för att återhämta dig; om omflashning inte hjälper kan kortet vara fysiskt skadat.
Mjukvarubibliotek¶
Se biblioteksindexet för den fullständiga listan över moduler — inklusive vilka som är unika för H7-bygget.