OpenMV Cam RT1062¶
De OpenMV Cam RT1062 is een energiezuinig machine vision-bord gebouwd rond de NXP i.MX RT1062 (Cortex‑M7 @ 600 MHz). Het bord combineert USB‑C high‑speed netwerken, Wi‑Fi/Bluetooth en 10/100 Ethernet met een OV5640 5MP-sensor op een verwisselbare drager. De camera trekt in diepe slaap slechts ~30 µA uit een LiPo-batterij, waardoor hij uitstekend geschikt is voor projecten op batterijvoeding.
Voor de volledige datasheet, foto’s en afmetingen, zie de productpagina van de OpenMV Cam RT1062.
Hoogtepunten¶
NXP i.MX RT1062 Cortex‑M7 op 600 MHz.
32 MB extern SDRAM (16‑bit @ 160 MHz, 320 MB/s) plus 1 MB intern SRAM en 16 MB QSPI flashgeheugen (133 MHz 4‑bit SDR, 66 MB/s lezen); 4 KB EEPROM op R6+.
OV5640 5MP rolling‑shutter sensor.
Ingebouwde IMU (12‑bit 3‑assige versnellingsmeter, ±2/4/8 g).
High‑speed USB‑C (480 Mb/s, 1,5 A stroomlimiet), 10/100 Mb/s Ethernet (PoE‑geschikt via shield), Wi‑Fi a/b/g/n + Bluetooth 5.1 (chipantenne of U.FL-optie).
microSD-aansluiting — SD tot 2 GB, SDHC tot 32 GB, SDXC tot 2 TB.
LiPo-lader (500 mA op R6+, 100 mA op R4/R5), RTC met pads voor back‑upbatterij. Diepe slaap trekt ~30 µA op batterij.
14 I/O-pinnen, allemaal 3,3 V uitgang / 3,3 V tolerant, 4 mA per pin, interrupt‑geschikt.
RGB-LED voor gebruiker, SW-knop voor gebruiker, hardware-aan/uitknop (diepe slaap / wake state machine), en een aparte status-LED voor opladen / USB / VIN-voeding.
Waarschuwing
De I/O-pinnen van de RT1062 zijn niet 5 V tolerant. Sluit het apparaat niet rechtstreeks aan op een 5 V-MCU zoals de Arduino Mega. Voed het bord uitsluitend via VIN.
Pinout¶
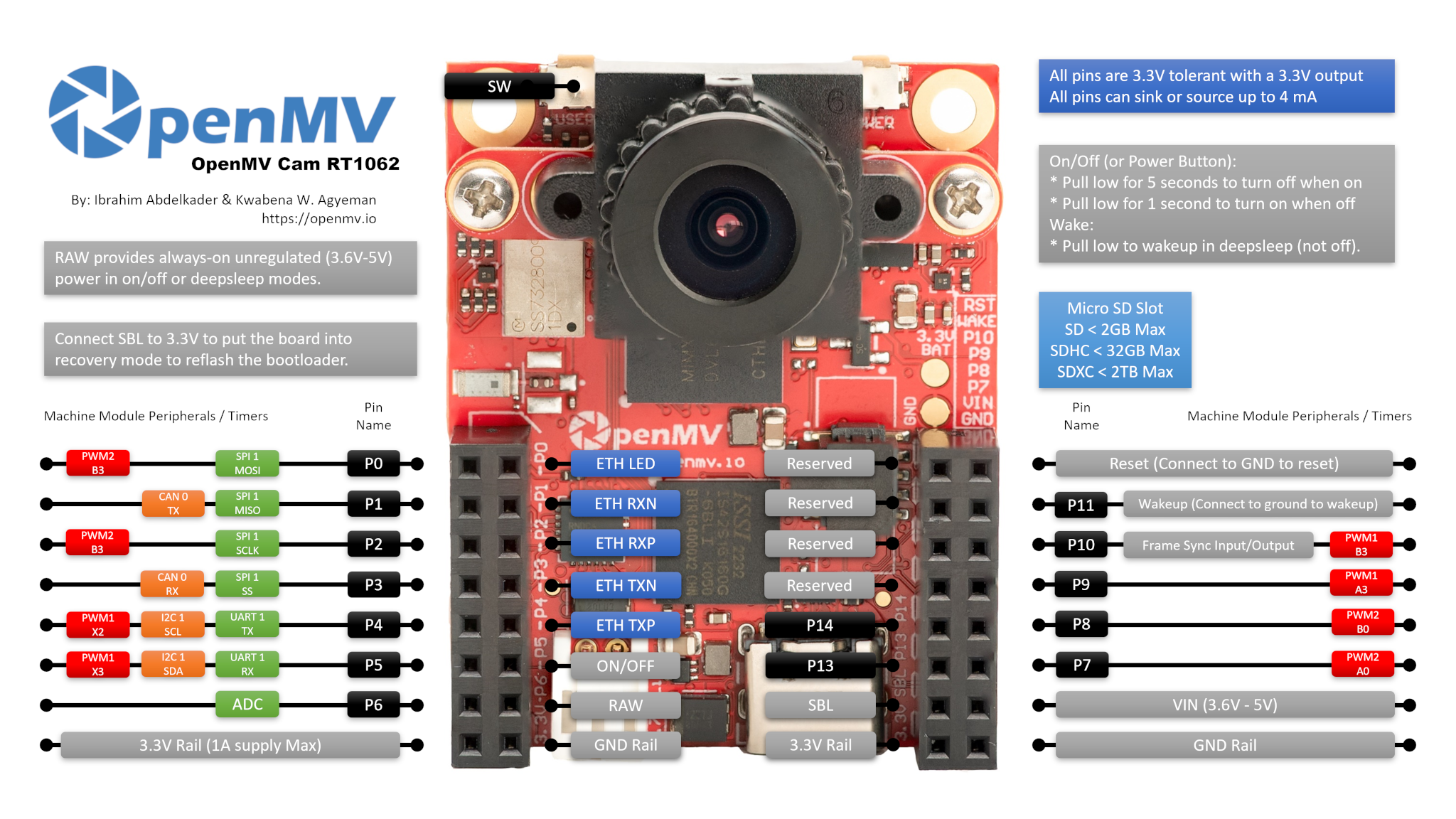
Pinreferentie¶
Pinnaam |
Functie |
|---|---|
P0 |
SPI1 MOSI / PWM2 B3 |
P1 |
SPI1 MISO / CAN0 TX |
P2 |
SPI1 SCLK / PWM2 B3 |
P3 |
SPI1 SS / CAN0 RX |
P4 |
I2C1 SCL / UART1 TX / PWM1 X2 |
P5 |
I2C1 SDA / UART1 RX / PWM1 X3 |
P6 |
ADC |
P7 |
PWM2 A0 |
P8 |
PWM2 B0 |
P9 |
PWM1 A3 |
P10 |
PWM1 B3 / frame sync I/O |
P11 |
wakeup (actief laag, verbind met GND om te wekken) |
P12 |
RESET — trek naar GND om het bord te resetten (geen GPIO) |
P13 |
digitale I/O |
P14 |
digitale I/O |
ON/OFF |
headerpad die de hardware-aan/uitknop nabootst (actief laag) |
SW |
gebruikersknop (actief laag) |
ST |
laag op VIN-voeding, hoog op USB-voeding |
CHG |
actief‑laag; laag terwijl een aangesloten LiPo-batterij oplaadt |
PG |
actief‑laag; laag wanneer VIN- of USB-voeding aanwezig is |
LED_RED |
rode kanaal van RGB-LED (actief laag) |
LED_GREEN |
groene kanaal van RGB-LED (actief laag) |
LED_BLUE |
blauwe kanaal van RGB-LED (actief laag) |
Notitie
De P10 frame‑sync-lijn is een gedeelde bus. Hij is tegelijk verbonden met de MCU, de trigger‑/belichtingspin van de camerasensor en de gebruikersheader. De richting is door de toepassing bepaald — de MCU, de sensor of een extern signaal kan hem aansturen, afhankelijk van hoe de sensor is geconfigureerd. Zorg ervoor dat er steeds maar één driver tegelijk actief is.
Notitie
ON/OFF en P11 zijn gerefereerd aan de altijd‑aan RAW-rail (niet de geschakelde 3,3 V-rail), zodat ze functioneel blijven terwijl de rest van het bord in diepe slaap / energiezuinige modus is. Beide ingangen zijn actief laag.
Deze pinnen lopen via level shifters zodat ze op de RAW-rail kunnen meeliften. Als je echt 3,3 V‑directe GPIO-werking op ON/OFF of P11 nodig hebt (bijvoorbeeld om ze vanaf een 3,3 V-MCU aan te sturen zonder via de shifter te gaan), heeft het bord pull‑up- en 0‑ohm-jumperpads waarmee je de shifter kunt omzeilen. Dit is een geavanceerde hardware-aanpassing — de meeste gebruikers laten dit beter ongemoeid.
Notitie
P13 en P14 zijn standaard gewone GPIO zonder speciale functie. De pads kunnen optioneel naar andere signalen worden omgeleid door de 0‑ohm-weerstandssoldeerbruggen aan de achterkant van het bord opnieuw te solderen:
P13 ↔ CHG-status / JTAG TRSTB
P14 ↔ ST-status / JTAG TDI
De meeste gebruikers raken deze jumpers niet aan — laat ze op de GPIO-standaard staan, tenzij je specifiek terugmelding van het energiebeheer of JTAG nodig hebt.
Voedingspinnen¶
3.3V — gereguleerde 3,3 V-rail. Alleen uitgang op de RT1062 — voer geen externe voeding in deze pin. Tot 1 A beschikbaar voor shields.
VIN — 5 V-ingang. Voedt het bord en de ingebouwde LiPo-lader.
RAW — ingang/uitgang, altijd‑aan (3,6 V – 5 V). Voert de momenteel actieve bron (VIN, USB of aangesloten batterij), en kan ook als ingang worden gebruikt. Je moet RAW via een serie-diode aansturen wanneer je er voeding in voert — anders stroomt er stroom terug in VIN/USB en beschadigt dit de voeding of de ingebouwde bescherming.
GND — gemeenschappelijke massa.
Notitie
De ingebouwde energiebeheerchip kiest automatisch welke van USB of VIN de hogere spanning heeft om het bord en de batterijlader te voeden. Als er een LiPo is aangesloten, laadt deze op met de overgebleven marge, en de controller valt terug op de batterij om het bord draaiende te houden als VIN/USB inzakken of worden losgekoppeld.
Notitie
De achterkant van het bord heeft soldeerpads voor een externe 3,3 V RTC-back‑upbatterij. Door een knoopcel op deze pads aan te sluiten blijft de RTC lopen terwijl de rest van het bord geen voeding heeft.
Tip
Gebruik de batterijduur-schatter om te modelleren hoe lang de RT1062 op een batterij zal draaien voor een gegeven actief / diepe-slaap-werkverhouding.
Ethernet-pinnen¶
De RT1062 stelt de MDI-paren van de 10/100 Mb/s Ethernet-PHY beschikbaar op speciale pads naast de GPIO-header. De MDI-pinnen kunnen niet veilig rechtstreeks op een RJ45 worden aangesloten — Ethernet-magnetics (een isolatietransformator, ingebouwd in een magjack of op het shield) zijn vereist tussen de PHY en de kabel. Het OpenMV PoE-shield bevat ze; als je je eigen aansluiting maakt, gebruik dan een RJ45 met geïntegreerde magnetics of een externe transformator.
ETH_LED — link/activiteit-LED. Actief laag wanneer er een link is; knippert bij verkeer.
ETH_TXP / ETH_TXN — zendpaar.
ETH_RXP / ETH_RXN — ontvangstpaar.
Notitie
De header stelt ook vier pads beschikbaar met de zeefdruk Reserved. Deze zijn footprint‑compatibel met de gigabit Ethernet-paren op de OpenMV N6 (DC P/N en DD P/N), zodat hetzelfde Ethernet- / PoE-shield op beide borden kan worden aangesloten. De PHY van de RT1062 doet alleen 10/100 Mb/s, dus die vier pads hebben geen elektrische verbinding — laat ze onaangesloten.
Herstel- en debug-pinnen¶
RESET — trek naar GND om het bord te resetten. Door hem los te laten kan de MCU normaal opstarten.
SBL — trek naar 3,3 V tijdens het voeden van het bord om de ROM-bootloader-modus (Serial Boot Loader) te activeren. OpenMV IDE gebruikt deze modus om de ingebouwde bootloader opnieuw te flashen.
Er is een speciale ARM 10‑pins SWD/JTAG-header gemonteerd, compatibel met ST‑LINK- en SEGGER J‑Link-adapters.
Notitie
De RT1062 stelt via deze connector standaard alleen SWD-debug beschikbaar. Volledige JTAG is niet kant‑en‑klaar beschikbaar.
Ingebouwde randapparaten¶
LED’s¶
De RT1062 heeft twee RGB-LED’s:
RGB-LED voor gebruiker — softwarematig regelbaar, beschikbaar als
LED_RED,LED_GREENenLED_BLUEfrom machine import LED LED("LED_RED").on() LED("LED_GREEN").on() LED("LED_BLUE").on()
Voedings-LED — rechtstreeks aangestuurd door de ingebouwde energiebeheerhardware, geen softwarematige besturing. Gebruik hem om in één oogopslag te zien wat de voeding doet.
Tijdens het draaien:
Kanaal
Betekenis
Blauw
VIN voedt het bord (uit bij USB)
Groen
USB- of VIN-voeding aanwezig
Rood
een aangesloten LiPo-batterij wordt opgeladen
In diepe slaap zijn alle kanalen uit behalve Rood, die nog brandt terwijl een LiPo oplaadt.
Voedingsstatuspinnen¶
Drie actief‑lage statusingangen van de ingebouwde energiebeheerchip:
PG — laag wanneer VIN- of USB-voeding aanwezig is. Altijd verbonden.
ST — laag wanneer het bord op VIN draait, hoog wanneer het op USB-voeding draait. Standaard niet verbonden.
CHG — laag terwijl een aangesloten LiPo-batterij oplaadt. Standaard niet verbonden.
from machine import Pin
power_ok = not Pin("PG", Pin.IN).value()
Camerasensor¶
De OV5640 wordt aangestuurd via de csi — camerasensoren-module:
import csi
cam = csi.CSI()
cam.reset()
cam.pixformat(csi.RGB565)
cam.framesize(csi.QVGA)
cam.snapshot(time=2000) # let auto‑exposure settle
while True:
img = cam.snapshot()
De OV5640 heeft een ingebouwde JPEG-compressor. Stel csi.CSI.pixformat in op csi.JPEG en de sensor levert gecomprimeerde frames rechtstreeks aan de cam over de camerabus, waardoor opnamen met hoge resolutie praktisch worden: csi.HD (1280×720), csi.FHD (1920×1080) en de volledige 5MP csi.WQXGA2 (2592×1944) streamen allemaal als JPEG. Stel de compressie af met csi.CSI.quality (0-100, hoger = grotere frames, meer detail):
{kind=link}
cam.pixformat(csi.JPEG)
cam.framesize(csi.WQXGA2)
cam.quality(90)
De sensor zit op een verwisselbare module — verwissel hem voor een van de andere OpenMV-cameramodules (global shutter, thermisch, hogere resolutie, enz.) zonder de rest van het bord te wijzigen.
Machine learning¶
ml — Machine Learning draait gekwantiseerde TFLite-modellen op de Cortex‑M7 met CMSIS‑NN-kernels — snel genoeg voor compacte detectors met enkele frames per seconde. Modellen op het alleen‑lezen /rom-bestandssysteem laden rechtstreeks vanuit flashgeheugen zonder naar RAM te kopiëren. Hier is een 128×128 BlazeFace-detector die het gedetecteerde gezicht en zijn zes oriëntatiepunten op elk frame overlayt:
import csi
import time
import ml
from ml.postprocessing.mediapipe import BlazeFace
# Initialize the sensor.
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.VGA)
csi0.window((400, 400))
# Load built-in face detection model
model = ml.Model("/rom/blazeface_front_128.tflite", postprocess=BlazeFace(threshold=0.4))
print(model)
clock = time.clock()
while True:
clock.tick()
img = csi0.snapshot()
# faces is a list of ((x, y, w, h), score, keypoints) tuples
for r, score, keypoints in model.predict([img]):
ml.utils.draw_predictions(img, [r], ("face",), ((0, 0, 255),), format=None)
# keypoints is a ndarray of shape (6, 2)
# 0 - right eye (x, y)
# 1 - left eye (x, y)
# 2 - nose (x, y)
# 3 - mouth (x, y)
# 4 - right ear (x, y)
# 5 - left ear (x, y)
ml.utils.draw_keypoints(img, keypoints, color=(255, 0, 0))
print(clock.fps(), "fps")
IMU¶
De RT1062-firmware koppelt de ingebouwde versnellingsmeter niet aan de imu — imu-sensor-module. Communiceer er in plaats daarvan rechtstreeks mee over de interne I²C-bus — de chip bevindt zich op adres 0x15 en bevat drie signed 12‑bit versnellingskanalen plus een 8‑bit temperatuurbyte, beginnend bij register 0x03
import machine
import time
ADDR = 0x15
DATA_REG = 0x03
LSB_PER_G = 1024.0 # ±2 g range
def s12(hi, lo):
v = ((hi << 8) | lo) >> 4
return v - 0x1000 if v & 0x800 else v
bus = machine.I2C(2)
print("Devices on I²C2:", bus.scan())
while True:
d = bus.readfrom_mem(ADDR, DATA_REG, 7)
x = s12(d[0], d[1]) / LSB_PER_G
y = s12(d[2], d[3]) / LSB_PER_G
z = s12(d[4], d[5]) / LSB_PER_G
temp_c = d[6] * 0.586 + 25.0
print("x=%+.2fg y=%+.2fg z=%+.2fg T=%.1f°C" % (x, y, z, temp_c))
time.sleep_ms(100)
EEPROM¶
R6-borden en later bevatten een generieke 4 KB I²C-EEPROM op dezelfde interne bus als de versnellingsmeter. (Eerdere revisies hebben er geen — het aanroepen van deze snippets op R4/R5 zal een time‑out geven door een ontbrekende I²C-ack.) Gebruik de standaard machine.I2C readfrom_mem / writeto_mem API met een 16‑bit geheugenadres:
import machine
import time
EEPROM_ADDR = 0x50 # default address
PAGE_SIZE = 32 # bytes per page (both read and write)
EEPROM_SIZE = 4096
bus = machine.I2C(2)
# Dump the entire 4 KB one page at a time
data = bytearray()
for offset in range(0, EEPROM_SIZE, PAGE_SIZE):
data += bus.readfrom_mem(EEPROM_ADDR, offset, PAGE_SIZE, addrsize=16)
print(len(data), "bytes")
# Write a small payload back at offset 0 (fits in one page)
bus.writeto_mem(EEPROM_ADDR, 0, b"hello, world", addrsize=16)
time.sleep_ms(10) # ~5 ms write cycle after each page
# Read it back
print(bus.readfrom_mem(EEPROM_ADDR, 0, 12, addrsize=16))
Zowel lees- als schrijfacties moeten binnen een pagina van 32 bytes blijven. Splits elke grotere overdracht op in één aanroep per pagina, en voeg de schrijfcyclusvertraging van ~5 ms toe tussen opeenvolgende schrijfacties.
Wi‑Fi¶
De ingebouwde module uit de CYW43-familie is via network — netwerkconfiguratie beschikbaar als station-interface. Na het verbinden retourneert ipconfig("addr4") het (ip, netmask)-paar:
import network, time
wlan = network.WLAN(network.STA_IF)
wlan.active(True)
wlan.connect("ssid", "password")
while not wlan.isconnected():
time.sleep(1)
print("Wi‑Fi IP:", wlan.ipconfig("addr4")[0])
Bluetooth¶
Dezelfde draadloze module stelt ook Bluetooth 5.1 beschikbaar. Gebruik aioble — Async BLE voor asyncio‑vriendelijke BLE — adverteer bijvoorbeeld als randapparaat en wacht tot een central verbinding maakt:
import asyncio
import aioble
async def run():
while True:
conn = await aioble.advertise(250_000, name="OpenMV-RT1062")
print("Connected:", conn.device)
await conn.disconnected()
asyncio.run(run())
Ethernet¶
Wanneer een RJ45 (met magnetics) op de MDI-pads is aangesloten, verschijnt de 10/100-PHY als een LAN-interface. DHCP draait automatisch zodra de link tot stand komt:
import network, time
lan = network.LAN()
lan.active(True)
while not lan.isconnected():
time.sleep(1)
print("Ethernet IP:", lan.ipconfig("addr4")[0])
microSD-kaart¶
Wanneer een kaart is geplaatst, wordt deze automatisch gemount op /sdcard en is bruikbaar via het normale bestandssysteem:
import os
for entry in os.listdir("/sdcard"):
print(entry)
Busreferentie¶
GPIO¶
Gebruik machine.Pin om een van de pinnen met zeefdruk uit te lezen of aan te sturen. Uitgangen zijn 3,3 V CMOS en kunnen tot 4 mA per pin sinken/sourcen.
from machine import Pin
out = Pin("P0", Pin.OUT)
out.on()
out.off()
out.value(1)
inp = Pin("P1", Pin.IN, Pin.PULL_UP)
print(inp.value())
Elke ingangspin kan ook een interrupt afvuren bij randovergangen:
def handler(pin):
print("triggered:", pin)
Pin("P1", Pin.IN, Pin.PULL_UP).irq(
handler, Pin.IRQ_FALLING | Pin.IRQ_RISING,
)
UART¶
Bus |
TX |
RX |
|---|---|---|
UART1 |
P4 |
P5 |
from machine import UART
uart = UART(1, baudrate=115200)
uart.write("hello")
uart.read(5)
I²C¶
Bus |
SCL |
SDA |
|---|---|---|
I2C1 |
P4 |
P5 |
from machine import I2C
i2c = I2C(1, freq=400_000)
i2c.scan()
i2c.writeto(0x76, b"hi")
Dezelfde hardware kan ook in target- (slave-)modus worden gebruikt via machine.I2CTarget om een geheugengebied beschikbaar te stellen aan een andere I²C-controller:
from machine import I2CTarget
buf = bytearray(32)
target = I2CTarget(1, addr=0x42, mem=buf)
SPI¶
Bus |
MOSI |
MISO |
SCK |
CS |
|---|---|---|---|---|
SPI1 |
P0 |
P1 |
P2 |
P3 |
from machine import SPI
from machine import Pin
spi = SPI(1, baudrate=10_000_000)
cs = Pin("P3", Pin.OUT, value=1) # CS is not driven by the SPI peripheral
cs.value(0)
spi.write(b"hello")
cs.value(1)
CAN¶
Bus |
TX |
RX |
|---|---|---|
CAN1 |
P1 |
P3 |
Notitie
CAN wordt in firmware v5.0.0 nog niet ondersteund op dit bord.
from machine import CAN
can = CAN(1, 500_000)
can.set_filters(None)
can.send(0x123, b"\xDE\xAD\xBE\xEF")
print(can.recv())
ADC¶
De enige ADC-pin voor de gebruiker is P6, die volledige schaal bereikt bij ~3,3 V:
from machine import ADC
import time
adc = ADC("P6")
while True:
voltage = adc.read_u16() * 3.3 / 65535
print(voltage)
time.sleep_ms(100)
PWM¶
Pin |
FlexPWM-kanaal |
|---|---|
P0 |
PWM2 B3 |
P2 |
PWM2 B3 |
P4 |
PWM1 X2 |
P5 |
PWM1 X3 |
P7 |
PWM2 A0 |
P8 |
PWM2 B0 |
P9 |
PWM1 A3 |
P10 |
PWM1 B3 |
Stuur er een van aan via machine.PWM
from machine import Pin, PWM
pwm = PWM(Pin("P9"), freq=1_000, duty_u16=32768)
Softwarematige bit‑banged bussen¶
machine.SoftI2C en machine.SoftSPI werken op elke GPIO als je een extra bus nodig hebt.
Thermische sensor (extern)¶
De firmware bevat de fir — thermische sensor-driver (fir == far infrared)-driver voor extern bedrade thermische beeldsensoren:
MLX90621 — 16 × 4 IR-array
MLX90640 — 32 × 24 IR-array
MLX90641 — 16 × 12 IR-array
AMG8833 — 8 × 8 IR-array
Sluit de module aan op de I²C-bus van het bord en lees frames met fir.init() + fir.snapshot()
import time
import image
import fir
fir.init() # auto‑detects the sensor
clock = time.clock()
while True:
clock.tick()
try:
img = fir.snapshot(x_scale=5, y_scale=5,
color_palette=image.PALETTE_IRONBOW,
hint=image.BICUBIC,
copy_to_fb=True)
except OSError:
continue
print(clock.fps())
De fir-driver communiceert alleen via I²C 4 met de sensor — sluit de module aan op P4 (SCL) en P5 (SDA).
Timing¶
time¶
De time-module dekt blokkerende vertragingen, monotone ticks en het meten van verstreken tijd:
import time
time.sleep(1) # seconds
time.sleep_ms(500)
time.sleep_us(10)
start = time.ticks_ms()
# ...do work...
elapsed = time.ticks_diff(time.ticks_ms(), start)
Virtuele timers¶
machine.Timer plant periodieke of eenmalige callbacks zonder een hardware-timerslot te gebruiken. Geef -1 op als de id om een virtuele (software-)timer te gebruiken:
from machine import Timer
one_shot = Timer(-1)
one_shot.init(period=5_000, mode=Timer.ONE_SHOT,
callback=lambda t: print("once"))
periodic = Timer(-1)
periodic.init(period=2_000, mode=Timer.PERIODIC,
callback=lambda t: print("tick"))
Periodewaarden zijn in milliseconden. Roep deinit() aan om te stoppen en het slot vrij te geven.
Real‑time klok¶
machine.RTC houdt de wandklok-tijd bij over resets heen en (met de optionele 3,3 V back‑upbatterij aangesloten op de achterste pads, zie Voedingspinnen) over volledig stroomverlies heen:
from machine import RTC
rtc = RTC()
rtc.datetime((2026, 4, 30, 4, 12, 0, 0, 0)) # Y, M, D, weekday, h, m, s, subsec
print(rtc.datetime())
De RTC blijft ook tijdens diepe slaap lopen, zodat je hem kunt gebruiken als wakeup-bron voor machine.deepsleep().
Watchdog¶
machine.WDT reset het bord als de toepassing vastloopt. Eenmaal gestart kan hij niet worden gestopt of opnieuw geconfigureerd — voed hem periodiek binnen je hoofdlus:
from machine import WDT
wdt = WDT(timeout=5_000) # 5 second window
while True:
# ...do work...
wdt.feed()
Boot- en runtime-informatie¶
USB-bootloader-venster¶
Bij elke inschakeling draait de camera een korte bootloader (enkele seconden) waarmee OpenMV IDE de firmware kan updaten zonder dat de gebruiker de DFU-modus hoeft te openen. Nadat het venster verloopt, draagt de bootloader over aan boot.py en vervolgens main.py.
Een draaiend script kan op verzoek opnieuw de bootloader binnengaan door machine.bootloader() aan te roepen:
import machine
machine.bootloader()
Bestandssysteem en bootvolgorde¶
De RT1062-firmware mount bij het opstarten maximaal drie bestandssystemen:
Intern flashgeheugen — altijd gemount op
/flash. Bevat standaardmain.pyenREADME.txt; aangemaakt bij de allereerste boot.microSD-kaart — als er een kaart is geplaatst, wordt deze gemount op
/sdcard.ROMFS — alleen‑lezen, geheugen‑gemapt bestandssysteem op
/rom, gebruikt om grote datagegevens te leveren (bijv. AI-modellen) die baat hebben bij zero‑copy-toegang. Wordt bij het opstarten automatisch door MicroPython gemount, vóór er enige gebruikers-Python draait.
Na het mounten wordt de werkmap ingesteld op /sdcard wanneer de kaart aanwezig is, anders /flash. De interpreter draait vervolgens scripts vanuit die map:
boot.pywordt uitgevoerd bij elke soft reset (koude boot,Ctrl‑Dvanuit de REPL, of telkens wanneer het draaiende script terugkeert).main.pywordt alleen bij een koude boot uitgevoerd, direct naboot.py. Latere soft resets draaienboot.pyopnieuw maar vallen rechtstreeks terug op de REPL — ommain.pyopnieuw te draaien moet je het bord volledig resetten.
Het plaatsen van een boot.py of main.py op de SD-kaart overschrijft de kopie in flashgeheugen zonder deze aan te raken — beide bestanden worden opgezocht in de bootmap (/sdcard wanneer de kaart is gemount, anders /flash).
De standaard main.py die op een vers geflasht bord wordt geleverd, laat alleen het blauwe kanaal van de RGB-LED voor de gebruiker knipperen als een hartslag (twee korte pulsen, korte tussenpauze), zodat je kunt zien dat de firmware netjes is opgestart zonder dat er een host is aangesloten.
sys.path wordt uitgebreid met alle drie de bestandssystemen en hun lib/-submappen, zodat importeerbare modules kunnen staan in /flash/lib, /sdcard/lib of /rom/lib.
Om het systeem te dwingen een geplaatste SD-kaart te negeren (bijvoorbeeld om de flash-main.py te draaien zelfs als er een kaart aanwezig is), maak je een leeg bestand met de naam SKIPSD in de root van /flash.
Wanneer verbonden via USB, wordt het bootbestandssysteem (/sdcard als er een kaart aanwezig is, anders /flash) ook op de host geënumereerd als een USB-massaopslagstation, waarmee je boot.py, main.py en alle andere bestanden rechtstreeks kunt bewerken. Werp het station uit voordat je de camera reset zodat de host zijn gecachete schrijfacties wegschrijft.
Notitie
Omdat het OS het station als een passief blokapparaat behandelt, zullen bestanden die worden aangemaakt of gewijzigd door code die op de OpenMV Cam draait, pas verschijnen wanneer de host het station opnieuw mount. Als zowel het OS als de OpenMV Cam tegelijkertijd naar hetzelfde bestandssysteem schrijven, wint het OS en overschrijft het de wijzigingen van de camera. Gebruik de SD-kaart voor alle gegevens die het script terugschrijft, en mount opnieuw voordat je die bestanden vanaf de host leest.
Notitie
Het rode kanaal van de RGB-LED voor de gebruiker kan kort oplichten terwijl de host van of naar het USB-massaopslagstation leest of schrijft — dit is een firmware‑aangestuurde activiteitsindicator, geen fout.
Opslaggroottes¶
De RT1062 wordt geleverd met:
/flash— 4 MB FAT-bestandssysteem, lezen/schrijven./rom— 8 MB alleen‑lezen geheugen‑gemapt ROMFS, gebruikt om scripts en ML-modellen te leveren die baat hebben bij zero‑copy mmap-toegang./sdcard— volledige grootte van de geplaatste microSD-kaart (indien aanwezig), lezen/schrijven.
Hard‑fault-indicator¶
Als de RGB-LED voor de gebruiker snel door alle kleuren cyclet — snel genoeg dat het meestal lijkt op een fonkelende witte LED in plaats van afzonderlijke tinten — dan heeft de firmware een onherstelbare hard fault opgelopen. Flash de firmware opnieuw om te herstellen; als opnieuw flashen niet helpt, kan het bord fysiek beschadigd zijn.
Softwarebibliotheken¶
Zie de bibliotheekindex voor de volledige lijst met modules — inclusief welke uniek zijn voor de RT1062-build.