OpenMV Cam RT1062¶
OpenMV Cam RT1062 è una scheda per visione artificiale a basso consumo costruita attorno all’NXP i.MX RT1062 (Cortex‑M7 @ 600 MHz). La scheda combina rete USB‑C high‑speed, Wi‑Fi/Bluetooth e Ethernet 10/100 con un sensore OV5640 da 5MP su un carrier rimovibile. In deep sleep la camera assorbe solo ~30 µA da una batteria LiPo, il che la rende particolarmente adatta a progetti alimentati a batteria.
Per il datasheet completo, le foto e le dimensioni consulta la pagina prodotto di OpenMV Cam RT1062.
Caratteristiche principali¶
NXP i.MX RT1062 Cortex‑M7 a 600 MHz.
32 MB di SDRAM esterna (16‑bit @ 160 MHz, 320 MB/s) più 1 MB di SRAM interna e 16 MB di flash QSPI (133 MHz 4‑bit SDR, 66 MB/s in lettura); 4 KB di EEPROM su R6+.
Sensore rolling‑shutter OV5640 da 5MP.
IMU integrata (accelerometro a 3 assi a 12‑bit, ±2/4/8 g).
USB‑C high‑speed (480 Mb/s, limite di corrente 1,5 A), Ethernet 10/100 Mb/s (compatibile PoE tramite shield), Wi‑Fi a/b/g/n + Bluetooth 5.1 (antenna su chip o opzione U.FL).
Socket microSD — SD fino a 2 GB, SDHC fino a 32 GB, SDXC fino a 2 TB.
Caricabatterie LiPo (500 mA su R6+, 100 mA su R4/R5), RTC con pad per batteria di backup. In deep sleep assorbe ~30 µA a batteria.
14 pin di I/O, tutti con uscita 3,3 V / tolleranti 3,3 V, 4 mA per pin, con capacità di interrupt.
LED RGB utente, pulsante SW utente, pulsante di accensione hardware (macchina a stati deep‑sleep / wake) e un LED di stato separato per ricarica / USB / alimentazione VIN.
Avvertimento
I pin di I/O dell’RT1062 non sono tolleranti 5 V. Non collegare il dispositivo direttamente a un MCU a 5 V come l’Arduino Mega. Alimenta la scheda solo tramite VIN.
Pinout¶
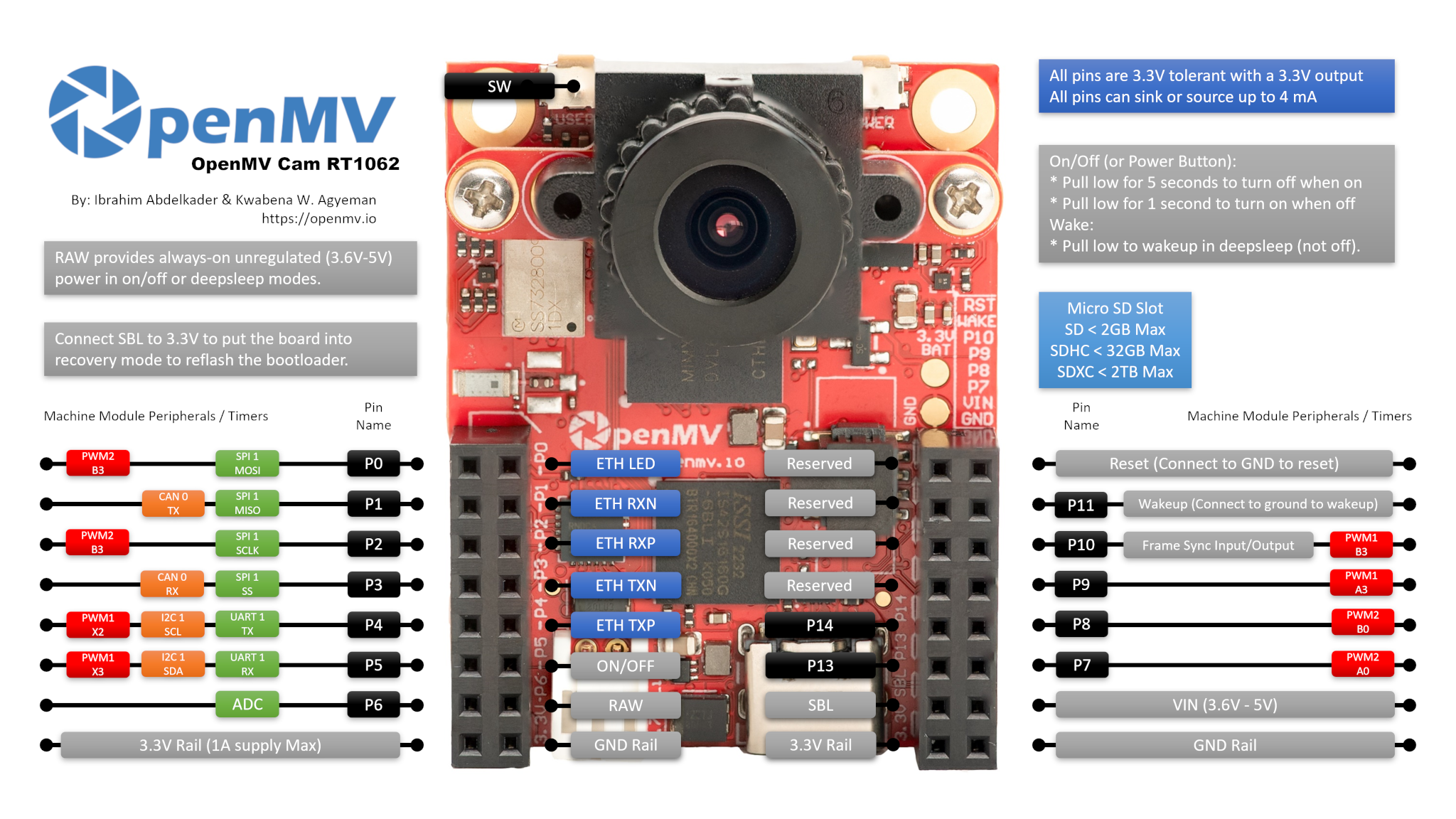
Riferimento dei pin¶
Nome del pin |
Funzione |
|---|---|
P0 |
SPI1 MOSI / PWM2 B3 |
P1 |
SPI1 MISO / CAN0 TX |
P2 |
SPI1 SCLK / PWM2 B3 |
P3 |
SPI1 SS / CAN0 RX |
P4 |
I2C1 SCL / UART1 TX / PWM1 X2 |
P5 |
I2C1 SDA / UART1 RX / PWM1 X3 |
P6 |
ADC |
P7 |
PWM2 A0 |
P8 |
PWM2 B0 |
P9 |
PWM1 A3 |
P10 |
PWM1 B3 / I/O frame sync |
P11 |
wakeup (attivo basso, collegare a GND per risvegliare) |
P12 |
RESET — collegare a GND per resettare la scheda (non è un GPIO) |
P13 |
I/O digitale |
P14 |
I/O digitale |
ON/OFF |
pad sull’header che replica il pulsante di accensione hardware (attivo basso) |
SW |
pulsante utente (attivo basso) |
ST |
basso con alimentazione VIN, alto con alimentazione USB |
CHG |
attivo basso; basso mentre una batteria LiPo collegata è in carica |
PG |
attivo basso; basso quando è presente alimentazione VIN o USB |
LED_RED |
canale rosso del LED RGB (attivo basso) |
LED_GREEN |
canale verde del LED RGB (attivo basso) |
LED_BLUE |
canale blu del LED RGB (attivo basso) |
Nota
La linea di frame‑sync P10 è un bus condiviso. È cablata contemporaneamente all’MCU, al pin di trigger / esposizione del sensore della camera e all’header utente. La direzione è definita dall’applicazione — l’MCU, il sensore o un segnale esterno possono pilotarla a seconda di come è configurato il sensore. Assicurati che sia attivo un solo driver alla volta.
Nota
ON/OFF e P11 sono riferiti al rail RAW sempre attivo (non al rail 3,3 V commutato), quindi restano funzionanti mentre il resto della scheda è in modalità deep sleep / basso consumo. Entrambi gli ingressi sono attivi bassi.
Questi pin passano attraverso dei level shifter così da poter operare sul rail RAW. Se hai assolutamente bisogno di un comportamento GPIO diretto a 3,3 V su ON/OFF o P11 (ad esempio per pilotarli da un MCU a 3,3 V senza passare per lo shifter), la scheda espone pad jumper di pull‑up e da 0 ohm che permettono di bypassare lo shifter. Si tratta di una modifica hardware avanzata — la maggior parte degli utenti dovrebbe lasciarla così com’è.
Nota
P13 e P14 sono GPIO normali per impostazione predefinita, senza funzione speciale. I pad possono opzionalmente essere ri‑instradati ad altri segnali rifondendo i ponticelli di resistenze da 0 ohm sul retro della scheda:
P13 ↔ stato CHG / JTAG TRSTB
P14 ↔ stato ST / JTAG TDI
La maggior parte degli utenti non toccherà questi jumper — lasciali sul valore predefinito GPIO a meno che tu non abbia specificamente bisogno della lettura della gestione dell’alimentazione o di JTAG.
Pin di alimentazione¶
3.3V — rail regolato a 3,3 V. Solo uscita sull’RT1062 — non immettere alimentazione esterna in questo pin. Fino a 1 A disponibile per gli shield.
VIN — ingresso 5 V. Alimenta la scheda e il caricabatterie LiPo integrato.
RAW — ingresso/uscita, sempre attivo (3,6 V – 5 V). Trasporta qualunque sorgente sia attiva (VIN, USB o batteria collegata) e può anche essere usato come ingresso. Devi pilotare RAW attraverso un diodo in serie quando vi immetti alimentazione — altrimenti la corrente rifluirà verso VIN/USB danneggiando l’alimentatore o la protezione integrata.
GND — massa comune.
Nota
Il chip di gestione dell’alimentazione integrato seleziona automaticamente quale tra USB o VIN abbia la tensione più alta per alimentare la scheda e il caricabatterie. Se è collegata una LiPo, questa viene caricata sul margine residuo, e il controller passa alla batteria per mantenere la scheda in funzione se VIN/USB calano o vengono scollegati.
Nota
Il retro della scheda ha pad di saldatura per una batteria di backup RTC esterna a 3,3 V. Collegando una batteria a bottone a questi pad si mantiene l’RTC in funzione mentre il resto della scheda è privo di alimentazione.
Suggerimento
Usa lo stimatore di durata della batteria per modellare quanto a lungo l’RT1062 funzionerà a batteria per un dato duty cycle attivo / deep‑sleep.
Pin Ethernet¶
L’RT1062 espone le coppie MDI del PHY Ethernet 10/100 Mb/s su pad dedicati accanto all’header GPIO. I pin MDI non possono essere cablati direttamente a un RJ45 — tra il PHY e il cavo è richiesta la magnetica Ethernet (un trasformatore di isolamento, integrato in un magjack o presente sullo shield). Lo shield PoE di OpenMV la include; se realizzi un tuo connettore, usa un RJ45 con magnetica integrata o un trasformatore esterno.
ETH_LED — LED di link/attività. Attivo basso quando il link è attivo; lampeggia in presenza di traffico.
ETH_TXP / ETH_TXN — coppia di trasmissione.
ETH_RXP / ETH_RXN — coppia di ricezione.
Nota
L’header espone anche quattro pad serigrafati Reserved. Questi sono compatibili come footprint con le coppie Ethernet gigabit dell”OpenMV N6 (DC P/N e DD P/N), così lo stesso shield Ethernet / PoE può essere collegato a entrambe le schede. Il PHY dell’RT1062 supporta solo 10/100 Mb/s, quindi quei quattro pad non hanno alcuna connessione elettrica — lasciali scollegati.
Pin di recovery e debug¶
RESET — collegare a GND per resettare la scheda. Rilasciandolo l’MCU si avvia normalmente.
SBL — collegare a 3,3 V durante l’alimentazione della scheda per entrare in modalità ROM bootloader (Serial Boot Loader). OpenMV IDE usa questa modalità per riprogrammare il bootloader integrato.
È presente un header dedicato ARM 10‑pin SWD/JTAG, compatibile con gli adattatori ST‑LINK e SEGGER J‑Link.
Nota
L’RT1062 espone per impostazione predefinita solo il debug SWD attraverso questo connettore. JTAG completo non è disponibile out of the box.
Periferiche integrate¶
LED¶
L’RT1062 ha due LED RGB:
LED RGB utente — controllabile via software, esposto come
LED_RED,LED_GREENeLED_BLUEfrom machine import LED LED("LED_RED").on() LED("LED_GREEN").on() LED("LED_BLUE").on()
LED di alimentazione — pilotato direttamente dall’hardware di gestione dell’alimentazione integrato, senza controllo software. Usalo per capire a colpo d’occhio cosa sta facendo l’alimentazione.
Durante il funzionamento:
Canale
Significato
Blu
VIN sta alimentando la scheda (spento con USB)
Verde
alimentazione USB o VIN presente
Rosso
ricarica di una batteria LiPo collegata
In deep sleep tutti i canali sono spenti tranne il Rosso, che resta acceso mentre una LiPo è in carica.
Pin di stato dell’alimentazione¶
Tre ingressi di stato attivi bassi provenienti dal chip di gestione dell’alimentazione integrato:
PG — basso quando è presente alimentazione VIN o USB. Sempre collegato.
ST — basso quando la scheda funziona a VIN, alto quando funziona ad alimentazione USB. Non collegato per impostazione predefinita.
CHG — basso mentre una batteria LiPo collegata è in carica. Non collegato per impostazione predefinita.
from machine import Pin
power_ok = not Pin("PG", Pin.IN).value()
Sensore della camera¶
L’OV5640 è pilotato tramite il modulo csi — sensori camera
import csi
cam = csi.CSI()
cam.reset()
cam.pixformat(csi.RGB565)
cam.framesize(csi.QVGA)
cam.snapshot(time=2000) # let auto‑exposure settle
while True:
img = cam.snapshot()
L’OV5640 ha un compressore JPEG integrato. Imposta csi.CSI.pixformat su csi.JPEG e il sensore consegna frame compressi direttamente alla cam sul bus della camera, il che rende pratiche le acquisizioni ad alta risoluzione: csi.HD (1280×720), csi.FHD (1920×1080) e i 5MP completi csi.WQXGA2 (2592×1944) vengono trasmessi tutti in JPEG. Regola la compressione con csi.CSI.quality (0‑100, più alto = frame più grandi, più dettaglio):
{kind=link}
cam.pixformat(csi.JPEG)
cam.framesize(csi.WQXGA2)
cam.quality(90)
Il sensore si trova su un modulo rimovibile — sostituiscilo con uno qualsiasi degli altri moduli camera di OpenMV (global shutter, termico, risoluzione maggiore, ecc.) senza cambiare il resto della scheda.
Machine learning¶
ml — Machine Learning esegue modelli TFLite quantizzati sul Cortex‑M7 con kernel CMSIS‑NN — abbastanza veloce per detector compatti a pochi frame al secondo. I modelli sul filesystem di sola lettura /rom vengono caricati direttamente dalla flash senza copiarli in RAM. Ecco un detector BlazeFace 128×128 che sovrappone il volto rilevato e i suoi sei landmark su ogni frame:
import csi
import time
import ml
from ml.postprocessing.mediapipe import BlazeFace
# Initialize the sensor.
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.VGA)
csi0.window((400, 400))
# Load built-in face detection model
model = ml.Model("/rom/blazeface_front_128.tflite", postprocess=BlazeFace(threshold=0.4))
print(model)
clock = time.clock()
while True:
clock.tick()
img = csi0.snapshot()
# faces is a list of ((x, y, w, h), score, keypoints) tuples
for r, score, keypoints in model.predict([img]):
ml.utils.draw_predictions(img, [r], ("face",), ((0, 0, 255),), format=None)
# keypoints is a ndarray of shape (6, 2)
# 0 - right eye (x, y)
# 1 - left eye (x, y)
# 2 - nose (x, y)
# 3 - mouth (x, y)
# 4 - right ear (x, y)
# 5 - left ear (x, y)
ml.utils.draw_keypoints(img, keypoints, color=(255, 0, 0))
print(clock.fps(), "fps")
IMU¶
Il firmware dell’RT1062 non collega l’accelerometro integrato al modulo imu — sensore imu. Comunica con esso direttamente sul bus I²C interno — il chip risiede all’indirizzo 0x15 e contiene tre canali di accelerazione con segno a 12‑bit più un byte di temperatura a 8‑bit a partire dal registro 0x03
import machine
import time
ADDR = 0x15
DATA_REG = 0x03
LSB_PER_G = 1024.0 # ±2 g range
def s12(hi, lo):
v = ((hi << 8) | lo) >> 4
return v - 0x1000 if v & 0x800 else v
bus = machine.I2C(2)
print("Devices on I²C2:", bus.scan())
while True:
d = bus.readfrom_mem(ADDR, DATA_REG, 7)
x = s12(d[0], d[1]) / LSB_PER_G
y = s12(d[2], d[3]) / LSB_PER_G
z = s12(d[4], d[5]) / LSB_PER_G
temp_c = d[6] * 0.586 + 25.0
print("x=%+.2fg y=%+.2fg z=%+.2fg T=%.1f°C" % (x, y, z, temp_c))
time.sleep_ms(100)
EEPROM¶
Le schede R6 e successive includono una EEPROM I²C generica da 4 KB sullo stesso bus interno dell’accelerometro. (Le revisioni precedenti non ne hanno una — eseguire questi snippet su R4/R5 andrà in timeout per un ack I²C mancante.) Usa la classica API machine.I2C readfrom_mem / writeto_mem con un indirizzo di memoria a 16‑bit:
import machine
import time
EEPROM_ADDR = 0x50 # default address
PAGE_SIZE = 32 # bytes per page (both read and write)
EEPROM_SIZE = 4096
bus = machine.I2C(2)
# Dump the entire 4 KB one page at a time
data = bytearray()
for offset in range(0, EEPROM_SIZE, PAGE_SIZE):
data += bus.readfrom_mem(EEPROM_ADDR, offset, PAGE_SIZE, addrsize=16)
print(len(data), "bytes")
# Write a small payload back at offset 0 (fits in one page)
bus.writeto_mem(EEPROM_ADDR, 0, b"hello, world", addrsize=16)
time.sleep_ms(10) # ~5 ms write cycle after each page
# Read it back
print(bus.readfrom_mem(EEPROM_ADDR, 0, 12, addrsize=16))
Sia le letture che le scritture devono restare all’interno di una pagina da 32 byte. Suddividi qualsiasi trasferimento più grande in una chiamata per pagina e aggiungi il ritardo del ciclo di scrittura di ~5 ms tra scritture consecutive.
Wi‑Fi¶
Il modulo della famiglia CYW43 integrato è esposto tramite network — configurazione di rete come interfaccia station. Dopo la connessione, ipconfig("addr4") restituisce la coppia (ip, netmask)
import network, time
wlan = network.WLAN(network.STA_IF)
wlan.active(True)
wlan.connect("ssid", "password")
while not wlan.isconnected():
time.sleep(1)
print("Wi‑Fi IP:", wlan.ipconfig("addr4")[0])
Bluetooth¶
Lo stesso modulo wireless espone anche Bluetooth 5.1. Usa aioble — BLE asincrono per BLE compatibile con asyncio — ad esempio, fai advertising come periferica e attendi che un central si connetta:
import asyncio
import aioble
async def run():
while True:
conn = await aioble.advertise(250_000, name="OpenMV-RT1062")
print("Connected:", conn.device)
await conn.disconnected()
asyncio.run(run())
Ethernet¶
Quando un RJ45 (con magnetica) è collegato ai pad MDI, il PHY 10/100 appare come interfaccia LAN. Il DHCP viene eseguito automaticamente non appena il link è attivo:
import network, time
lan = network.LAN()
lan.active(True)
while not lan.isconnected():
time.sleep(1)
print("Ethernet IP:", lan.ipconfig("addr4")[0])
Scheda microSD¶
Quando una scheda è inserita viene montata automaticamente su /sdcard ed è utilizzabile attraverso il normale file system:
import os
for entry in os.listdir("/sdcard"):
print(entry)
Riferimento dei bus¶
GPIO¶
Usa machine.Pin per leggere o pilotare uno qualsiasi dei pin serigrafati. Le uscite sono CMOS a 3,3 V e possono assorbire/erogare fino a 4 mA per pin.
from machine import Pin
out = Pin("P0", Pin.OUT)
out.on()
out.off()
out.value(1)
inp = Pin("P1", Pin.IN, Pin.PULL_UP)
print(inp.value())
Qualsiasi pin di ingresso può anche generare un interrupt sulle transizioni di fronte:
def handler(pin):
print("triggered:", pin)
Pin("P1", Pin.IN, Pin.PULL_UP).irq(
handler, Pin.IRQ_FALLING | Pin.IRQ_RISING,
)
UART¶
Bus |
TX |
RX |
|---|---|---|
UART1 |
P4 |
P5 |
from machine import UART
uart = UART(1, baudrate=115200)
uart.write("hello")
uart.read(5)
I²C¶
Bus |
SCL |
SDA |
|---|---|---|
I2C1 |
P4 |
P5 |
from machine import I2C
i2c = I2C(1, freq=400_000)
i2c.scan()
i2c.writeto(0x76, b"hi")
Lo stesso hardware può essere usato anche in modalità target (slave) tramite machine.I2CTarget per esporre una regione di memoria a un altro controller I²C:
from machine import I2CTarget
buf = bytearray(32)
target = I2CTarget(1, addr=0x42, mem=buf)
SPI¶
Bus |
MOSI |
MISO |
SCK |
CS |
|---|---|---|---|---|
SPI1 |
P0 |
P1 |
P2 |
P3 |
from machine import SPI
from machine import Pin
spi = SPI(1, baudrate=10_000_000)
cs = Pin("P3", Pin.OUT, value=1) # CS is not driven by the SPI peripheral
cs.value(0)
spi.write(b"hello")
cs.value(1)
CAN¶
Bus |
TX |
RX |
|---|---|---|
CAN1 |
P1 |
P3 |
Nota
CAN non è ancora supportato su questa scheda nel firmware v5.0.0.
from machine import CAN
can = CAN(1, 500_000)
can.set_filters(None)
can.send(0x123, b"\xDE\xAD\xBE\xEF")
print(can.recv())
ADC¶
L’unico pin ADC utente è P6, che è a fondo scala a ~3,3 V:
from machine import ADC
import time
adc = ADC("P6")
while True:
voltage = adc.read_u16() * 3.3 / 65535
print(voltage)
time.sleep_ms(100)
PWM¶
Pin |
Canale FlexPWM |
|---|---|
P0 |
PWM2 B3 |
P2 |
PWM2 B3 |
P4 |
PWM1 X2 |
P5 |
PWM1 X3 |
P7 |
PWM2 A0 |
P8 |
PWM2 B0 |
P9 |
PWM1 A3 |
P10 |
PWM1 B3 |
Pilotane uno qualsiasi tramite machine.PWM
from machine import Pin, PWM
pwm = PWM(Pin("P9"), freq=1_000, duty_u16=32768)
Bus bit‑banged software¶
machine.SoftI2C e machine.SoftSPI funzionano su qualsiasi GPIO se ti serve un bus aggiuntivo.
Sensore termico (esterno)¶
Il firmware include il driver fir — driver del sensore termico (fir == far infrared) per imager termici cablati esternamente:
MLX90621 — array IR 16 × 4
MLX90640 — array IR 32 × 24
MLX90641 — array IR 16 × 12
AMG8833 — array IR 8 × 8
Cabla il modulo al bus I²C della scheda e leggi i frame con fir.init() + fir.snapshot()
import time
import image
import fir
fir.init() # auto‑detects the sensor
clock = time.clock()
while True:
clock.tick()
try:
img = fir.snapshot(x_scale=5, y_scale=5,
color_palette=image.PALETTE_IRONBOW,
hint=image.BICUBIC,
copy_to_fb=True)
except OSError:
continue
print(clock.fps())
Il driver fir comunica con il sensore solo sull”I²C 4 — cabla il modulo a P4 (SCL) e P5 (SDA).
Temporizzazione¶
time¶
Il modulo time copre i ritardi bloccanti, i tick monotoni e la misurazione del tempo trascorso:
import time
time.sleep(1) # seconds
time.sleep_ms(500)
time.sleep_us(10)
start = time.ticks_ms()
# ...do work...
elapsed = time.ticks_diff(time.ticks_ms(), start)
Timer virtuali¶
machine.Timer pianifica callback periodici o one‑shot senza consumare uno slot di timer hardware. Passa -1 come id per usare un timer virtuale (software):
from machine import Timer
one_shot = Timer(-1)
one_shot.init(period=5_000, mode=Timer.ONE_SHOT,
callback=lambda t: print("once"))
periodic = Timer(-1)
periodic.init(period=2_000, mode=Timer.PERIODIC,
callback=lambda t: print("tick"))
I valori di periodo sono in millisecondi. Chiama deinit() per fermare e rilasciare lo slot.
Real‑time clock¶
machine.RTC mantiene l’ora di sistema attraverso i reset e (con la batteria di backup opzionale a 3,3 V cablata ai pad posteriori, vedi Pin di alimentazione) attraverso la perdita totale di alimentazione:
from machine import RTC
rtc = RTC()
rtc.datetime((2026, 4, 30, 4, 12, 0, 0, 0)) # Y, M, D, weekday, h, m, s, subsec
print(rtc.datetime())
L’RTC funziona anche durante il deep sleep, quindi puoi usarlo come sorgente di wakeup per machine.deepsleep().
Watchdog¶
machine.WDT resetta la scheda se l’applicazione si blocca. Una volta avviato non può essere fermato né riconfigurato — alimentalo periodicamente all’interno del tuo loop principale:
from machine import WDT
wdt = WDT(timeout=5_000) # 5 second window
while True:
# ...do work...
wdt.feed()
Informazioni di boot e runtime¶
Finestra del bootloader USB¶
A ogni accensione la camera esegue un breve bootloader (pochi secondi) che permette a OpenMV IDE di aggiornare il firmware senza che l’utente debba entrare in modalità DFU. Allo scadere della finestra il bootloader passa il controllo a boot.py e poi a main.py.
Uno script in esecuzione può rientrare nel bootloader su richiesta chiamando machine.bootloader()
import machine
machine.bootloader()
Filesystem e ordine di boot¶
Il firmware dell’RT1062 monta fino a tre filesystem all’avvio:
Flash interna — sempre montata su
/flash. Contienemain.pyeREADME.txtper impostazione predefinita; creata al primissimo boot.Scheda microSD — se una scheda è inserita viene montata su
/sdcard.ROMFS — filesystem di sola lettura, mappato in memoria, su
/romusato per distribuire grandi asset di dati (ad es. modelli AI) che beneficiano dell’accesso zero‑copy. Montato automaticamente da MicroPython all’avvio, prima che venga eseguito qualsiasi Python utente.
Dopo il montaggio, la directory di lavoro è impostata su /sdcard quando la scheda è presente, altrimenti su /flash. L’interprete esegue quindi gli script da quella directory:
boot.pyviene eseguito a ogni soft reset (cold boot,Ctrl‑Ddal REPL, o ogni volta che lo script in esecuzione termina).main.pyviene eseguito solo al cold boot, immediatamente dopoboot.py. I soft reset successivi rieseguonoboot.pyma passano direttamente al REPL — per rieseguiremain.pydevi resettare completamente la scheda.
Mettere un boot.py o main.py sulla scheda SD sovrascrive la copia in flash senza toccarla — entrambi i file vengono cercati nella directory di boot (/sdcard quando la scheda è montata, altrimenti /flash).
Il main.py predefinito fornito su una scheda appena flashata si limita a far lampeggiare il canale blu del LED RGB utente come heartbeat (due brevi impulsi, breve pausa), così puoi capire che il firmware si è avviato correttamente senza alcun host collegato.
sys.path viene esteso per includere tutti e tre i filesystem e le loro sottodirectory lib/, così i moduli importabili possono risiedere in /flash/lib, /sdcard/lib o /rom/lib.
Per forzare il sistema a ignorare una scheda SD inserita (ad esempio per eseguire il main.py in flash anche con una scheda presente), crea un file vuoto chiamato SKIPSD nella radice di /flash.
Quando è collegata via USB, il filesystem di boot (/sdcard se è presente una scheda, altrimenti /flash) viene anche enumerato come unità di archiviazione di massa USB sull’host, permettendoti di modificare boot.py, main.py e qualsiasi altro file direttamente. Espelli l’unità prima di resettare la camera così che l’host svuoti le sue scritture in cache.
Nota
Poiché il sistema operativo tratta l’unità come un dispositivo a blocchi passivo, i file creati o modificati dal codice in esecuzione sulla OpenMV Cam non compariranno finché l’host non rimonta l’unità. Se sia il sistema operativo sia la OpenMV Cam scrivono sullo stesso filesystem nello stesso momento, il sistema operativo prevarrà e sovrascriverà le modifiche fatte dalla camera. Usa la scheda SD per qualsiasi dato che lo script riscrive, e rimonta prima di leggere quei file dall’host.
Nota
Il canale rosso del LED RGB utente potrebbe accendersi brevemente mentre l’host legge da o scrive sull’unità di archiviazione di massa USB — è un indicatore di attività gestito dal firmware, non un guasto.
Dimensioni di archiviazione¶
L’RT1062 viene fornito con:
/flash— filesystem FAT da 4 MB, lettura/scrittura./rom— ROMFS di sola lettura mappata in memoria da 8 MB, usata per distribuire script e modelli ML che beneficiano dell’accesso mmap zero‑copy./sdcard— dimensione completa di qualsiasi scheda microSD inserita (quando presente), lettura/scrittura.
Indicatore di hard‑fault¶
Se il LED RGB utente sta ciclando rapidamente attraverso tutti i colori — abbastanza velocemente da sembrare un LED bianco scintillante anziché tinte distinte — il firmware ha incontrato un hard fault irrecuperabile. Riprogramma il firmware per ripristinare; se la riprogrammazione non aiuta, la scheda potrebbe essere fisicamente danneggiata.
Librerie software¶
Consulta l”indice della libreria per l’elenco completo dei moduli — inclusi quelli esclusivi della build RT1062.