Arduino Nano RP2040 Connect¶
Avvertimento
Questa scheda non è più supportata. L’ultima release del firmware OpenMV per Arduino Nano RP2040 Connect è la 4.7.0. Non verranno rilasciati ulteriori aggiornamenti del firmware, correzioni di bug o nuove funzionalità per questo target. Le informazioni riportate di seguito sono conservate per gli utenti che eseguono la versione 4.7.0 o precedente.
Arduino Nano RP2040 Connect è una scheda di 45 × 18 mm in formato Arduino Nano costruita attorno al Raspberry Pi RP2040 — un dual ARM Cortex‑M0+ che funziona a 133 MHz con 264 KB di SRAM interna. WiFi e BLE provengono da un modulo U‑blox NINA‑W102, e la scheda è dotata di una IMU a 6 assi LSM6DSOX e di un microfono PDM MP34DT06. Il firmware OpenMV pilota tutti questi componenti da MicroPython.
Per il datasheet completo, le foto e le dimensioni, vedere la pagina del prodotto Arduino Nano RP2040 Connect.
In evidenza¶
Raspberry Pi RP2040 dual ARM Cortex‑M0+ a 133 MHz con 264 KB di SRAM interna.
16 MB di flash QSPI esterna.
Modulo U‑blox NINA‑W102 che fornisce Wi‑Fi 2.4 GHz b/g/n e Bluetooth 4.2 (BR/EDR + LE).
IMU a 6 assi LSM6DSOX e microfono PDM MP34DT06.
Connettore Micro USB per alimentazione, programmazione e una REPL CDC.
22 pin di I/O utente sui connettori standard del Nano —
TX/RX,D2–D13(digitali),A0–A7(analogici).
Pinout¶
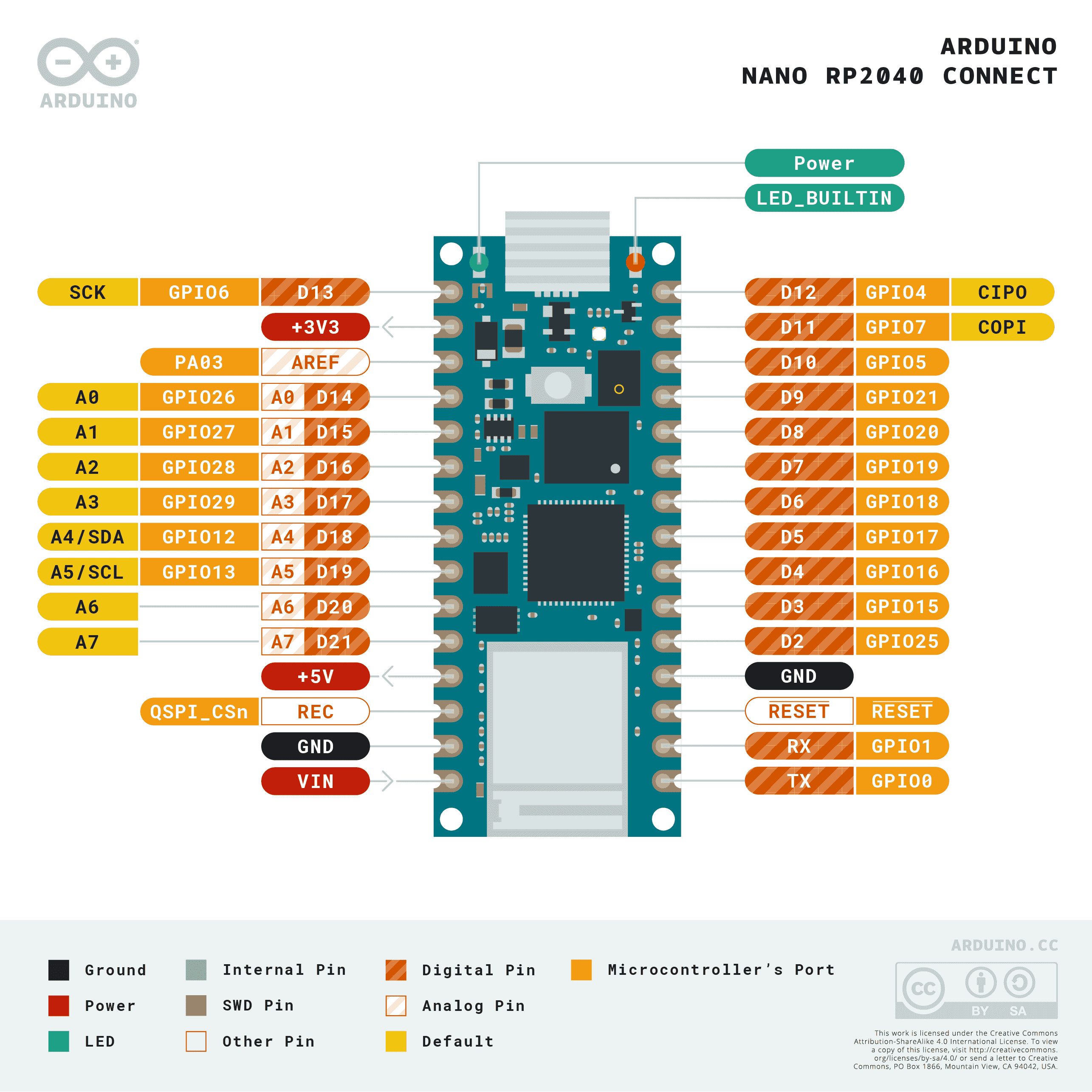
Riferimento dei pin¶
Nome del pin |
Riferimento |
Funzione |
|---|---|---|
TX |
3.3 V |
UART0 TX / SPI0 RX / I2C0 SDA / PWM0 A |
RX |
3.3 V |
UART0 RX / SPI0 CS / I2C0 SCL / PWM0 B |
D2 |
3.3 V |
SPI1 CS / UART1 RX / I2C0 SCL / PWM4 B |
D3 |
3.3 V |
SPI1 TX / UART0 RTS / I2C1 SCL / PWM7 B |
D4 |
3.3 V |
SPI0 RX / UART0 TX / I2C0 SDA / PWM0 A |
D5 |
3.3 V |
SPI0 CS / UART0 RX / I2C0 SCL / PWM0 B |
D6 |
3.3 V |
SPI0 SCK / UART0 CTS / I2C1 SDA / PWM1 A |
D7 |
3.3 V |
SPI0 TX / UART0 RTS / I2C1 SCL / PWM1 B |
D8 |
3.3 V |
SPI0 RX / UART1 TX / I2C0 SDA / PWM2 A |
D9 |
3.3 V |
SPI0 CS / UART1 RX / I2C0 SCL / PWM2 B |
D10 |
3.3 V |
SPI0 CS / UART1 RX / I2C0 SCL / PWM2 B |
D11 |
3.3 V |
SPI0 TX / UART1 RTS / I2C1 SCL / PWM3 B |
D12 |
3.3 V |
SPI0 RX / UART1 TX / I2C0 SDA / PWM2 A |
D13 |
3.3 V |
SPI0 SCK / UART1 CTS / I2C1 SDA / PWM3 A |
D14 / A0 |
3.3 V |
ADC / SPI1 SCK / UART1 CTS / I2C1 SDA / PWM5 A |
D15 / A1 |
3.3 V |
ADC / SPI1 TX / UART1 RTS / I2C1 SCL / PWM5 B |
D16 / A2 |
3.3 V |
ADC / SPI1 RX / UART0 TX / I2C0 SDA / PWM6 A |
D17 / A3 |
3.3 V |
ADC / SPI1 CS / UART0 RX / I2C0 SCL / PWM6 B |
D18 / A4 / SDA |
3.3 V |
ADC / I2C0 SDA / SPI1 RX / UART0 TX / PWM6 A |
D19 / A5 / SCL |
3.3 V |
ADC / I2C0 SCL / SPI1 CS / UART0 RX / PWM6 B |
D20 / A6 |
3.3 V |
ADC / GPIO |
D21 / A7 |
3.3 V |
ADC / GPIO |
RESET |
3.3 V |
premere il pulsante RESET integrato o portare a GND per effettuare il reset |
REC |
3.3 V |
BOOTSEL — portare a livello alto all’accensione per entrare nel bootloader ROM del RP2040 |
LED_BUILTIN |
— |
LED utente arancione su |
LED_RED |
— |
Canale rosso del LED RGB |
LED_GREEN |
— |
Canale verde del LED RGB |
LED_BLUE |
— |
Canale blu del LED RGB |
Avvertimento
I pin di I/O del Nano RP2040 Connect sono solo 3.3 V — non tollerano i 5 V. Applicare 5 V su di essi danneggerà il RP2040.
Pin di alimentazione¶
VIN — ingresso 4 – 20 V. Alimenta la scheda tramite il regolatore switching integrato. È inoltre alimentato tramite un diodo dalla linea 5 V dell’USB, quindi USB e
VINpossono essere presenti contemporaneamente senza retroalimentarsi a vicenda.+5V — non collegato per impostazione predefinita.
+3V3 — uscita del regolatore a 3.3 V.
AREF — pin di riferimento analogico. Su questa scheda non è collegato al RP2040 — l’ADC è sempre riferito a 3.3 V.
GND — massa comune.
Il Nano RP2040 Connect può essere alimentato attraverso entrambe le vie:
Micro USB — fornisce 5 V al regolatore integrato.
Pin VIN — applicare un’alimentazione regolata di 4 – 20 V.
Nota
Un jumper a saldare sul fondo della scheda collega +5V alla linea 5 V dell’USB. Chiuderlo per fare in modo che il pin del connettore +5V trasporti effettivamente i 5 V.
Nota
Un jumper a saldare normalmente chiuso sull’uscita del regolatore switching 4–20 V integrato può essere tagliato per disabilitare il regolatore, in modo che la scheda possa essere alimentata direttamente da un’alimentazione esterna a 3.3 V su +3V3.
Pin di recovery e debug¶
RESET — sia un pad esposto sia un pulsante RESET momentaneo nella parte superiore della scheda, collegati alla linea NRST del RP2040. Portare a GND o premere il pulsante per effettuare il reset.
REC — pad esposto. Tenere
RECa livello alto all’accensione (o mentre si preme RESET) mette il RP2040 nel suo bootloader ROM; la scheda si rienumera come unità di archiviazione di massa USB denominataRPI-RP2e accetta un’immagine firmware.uf2.
Il Nano RP2040 Connect utilizza il doppio tap di reset standard di Arduino per entrare nel bootloader di Arduino. Premere rapidamente il pulsante RESET due volte — la scheda si rienumera tramite USB come dispositivo UF2 e OpenMV IDE può flashare una nuova immagine firmware.
I segnali SWD del RP2040 sono esposti su pad metallizzati sul retro della scheda, appena sotto il modulo NINA. Tutti i segnali di debug sono riferiti a 3.3 V.
Periferiche integrate¶
LED¶
Il Nano RP2040 Connect dispone di un LED RGB utente — pilotato attraverso i canali serigrafati LED_RED, LED_GREEN e LED_BLUE — più un LED LED_BUILTIN arancione separato su D13. Tutti e quattro sono controllabili via software tramite machine.LED
from machine import LED
LED("LED_RED").on()
LED("LED_GREEN").on()
LED("LED_BLUE").on()
LED("LED_BUILTIN").on()
Un LED verde separato di alimentazione sulla scheda si accende ogni volta che la linea +3.3 V è attiva e non è controllabile dall’utente.
Sensore della camera¶
Il firmware OpenMV sul Nano RP2040 Connect supporta il sensore CMOS parallelo OmniVision OV7670. La scheda non ha un sensore di immagine integrato — collegare un modulo OV7670 ai pin serigrafati del connettore elencati di seguito e pilotarlo attraverso il modulo csi — sensori camera
import csi
cam = csi.CSI()
cam.reset()
cam.pixformat(csi.RGB565)
cam.framesize(csi.QVGA)
cam.snapshot(time=2000) # let auto‑exposure settle
while True:
img = cam.snapshot()
Nota
L’OV7670 richiede 14 pin. Il firmware li collega come segue:
Segnale del sensore |
Pin del Nano RP2040 |
|---|---|
D0 |
|
D1 |
|
D2 |
|
D3 |
|
D4 |
|
D5 |
|
D6 |
|
D7 |
|
HSYNC |
|
VSYNC |
|
PXCLK |
|
MXCLK |
|
POWER |
|
RESET |
|
SCL |
|
SDA |
|
Il bus di controllo I²C dell’OV7670 è condiviso con la IMU integrata e l’ATECC608A su I²C 0. Il sensore si trova all’indirizzo a 7 bit 0x21 — i dispositivi utente sul bus 0 devono anch’essi evitare questo indirizzo quando la camera è collegata.
IMU¶
L’accelerometro + giroscopio a 6 assi LSM6DSOX integrato si trova su I2C0. Il machine.I2C(0) della porta rp2 utilizza per impostazione predefinita un set di pin diverso, quindi passare esplicitamente i pad serigrafati SDA/SCL. Utilizzare il driver integrato lsm6dsox.LSM6DSOX
import time
from machine import I2C, Pin
from lsm6dsox import LSM6DSOX
bus = I2C(0, scl=Pin("SCL"), sda=Pin("SDA"))
imu = LSM6DSOX(bus)
while True:
print(imu.accel()) # (x, y, z) in g
print(imu.gyro()) # (x, y, z) in deg/s
time.sleep_ms(100)
Microfono¶
Il microfono PDM MP34DT06 integrato viene acquisito tramite audio — Modulo Audio utilizzando uno dei blocchi PIO del RP2040:
import audio
from ulab import numpy as np
def loudness(pcmbuf):
samples = np.array(np.frombuffer(pcmbuf, dtype=np.int16), dtype=np.float)
rms = np.sqrt(np.mean(samples ** 2))
if rms > 10000:
print("Loud!", int(rms))
audio.init(channels=1, frequency=16000, gain_db=24)
audio.start_streaming(loudness)
while True:
pass
Wi‑Fi¶
Il modulo NINA‑W102 integrato è esposto tramite network — configurazione di rete come interfaccia station:
import network, time
wlan = network.WLAN(network.STA_IF)
wlan.active(True)
wlan.connect("ssid", "password")
while not wlan.isconnected():
time.sleep(1)
print("Wi‑Fi IP:", wlan.ipconfig("addr4")[0])
Bluetooth¶
Lo stesso modulo NINA espone anche il Bluetooth 4.2 LE. Utilizzare aioble — BLE asincrono per il BLE compatibile con asyncio — ad esempio, fare advertising come periferica e attendere che un central si connetta:
import asyncio
import aioble
async def run():
while True:
conn = await aioble.advertise(250_000, name="Nano-RP2040")
print("Connected:", conn.device)
await conn.disconnected()
asyncio.run(run())
Riferimento dei bus¶
GPIO¶
Utilizzare machine.Pin per leggere o pilotare uno qualsiasi dei pin serigrafati. Le uscite sono CMOS a 3.3 V, con un assorbimento totale di 50 mA su tutti i GPIO.
from machine import Pin
out = Pin("D2", Pin.OUT)
out.on()
out.off()
out.value(1)
inp = Pin("D3", Pin.IN, Pin.PULL_UP)
print(inp.value())
Qualsiasi pin di ingresso può anche generare un interrupt sulle transizioni di fronte:
def handler(pin):
print("triggered:", pin)
Pin("D3", Pin.IN, Pin.PULL_UP).irq(
handler, Pin.IRQ_FALLING | Pin.IRQ_RISING,
)
UART¶
Bus |
TX |
RX |
|---|---|---|
UART0 |
TX |
RX |
Utilizzare i nomi serigrafati TX/RX con machine.UART
from machine import UART
uart = UART(0, baudrate=115200)
uart.write("hello")
uart.read(5)
Nota
machine.UART(1) esiste ma è riservato al modulo NINA‑W102 integrato (il collegamento BLE); non utilizzarlo direttamente.
I²C¶
Bus |
SDA |
SCL |
|---|---|---|
I2C0 |
|
|
I2C1 |
|
|
Entrambi i bus richiedono che i loro pin siano passati esplicitamente a machine.I2C
from machine import I2C, Pin
bus0 = I2C(0, scl=Pin("SCL"), sda=Pin("SDA"), freq=400_000)
bus0.scan()
bus1 = I2C(1, scl=Pin("A1"), sda=Pin("A0"), freq=400_000)
bus1.scan()
Nota
Due chip integrati condividono il bus 0 — i dispositivi utente su questo bus devono evitare i loro indirizzi:
0x6A— IMU LSM6DSOX0x60— ATECC608A‑MAHDA‑T
Utilizzare A0/A1 come I²C li impegna per il bus, quindi non possono fungere contemporaneamente da ingressi ADC.
Nota
I pad SDA / SCL (bus 0) hanno resistenze di pull‑up integrate verso 3.3 V, quindi non sono necessari pull‑up esterni per i dispositivi su quel bus. A0 / A1 (bus 1) non li hanno — aggiungere pull‑up esterni quando si utilizza il bus 1.
Lo stesso hardware può essere utilizzato anche in modalità target (slave) tramite machine.I2CTarget per esporre una regione di memoria a un altro controller I²C:
from machine import I2CTarget
buf = bytearray(32)
target = I2CTarget(0, addr=0x42, mem=buf)
SPI¶
Bus |
MOSI |
MISO |
SCK |
CS |
|---|---|---|---|---|
SPI0 |
D11 |
D12 |
D13 |
D10 |
La porta rp2 non preconfigura i pin di SPI0 su questa scheda, quindi passare esplicitamente i pad serigrafati durante la creazione del bus:
from machine import SPI, Pin
spi = SPI(0, baudrate=10_000_000,
sck=Pin("D13"), mosi=Pin("D11"), miso=Pin("D12"))
cs = Pin("D10", Pin.OUT, value=1) # CS is not driven by the SPI peripheral
cs.value(0)
spi.write(b"hello")
cs.value(1)
Nota
D13 funge anche da LED arancione LED_BUILTIN — pilotare l’SPI su questo bus farà lampeggiare il LED in sincronia con il clock del bus.
Nota
machine.SPI(1) esiste ma è riservato al modulo NINA‑W102 integrato (il collegamento SPI Wi‑Fi/BLE); non utilizzarlo direttamente.
ADC¶
Il RP2040 dispone di quattro canali ADC a 12 bit esposti su A0–A3, tutti riferiti a 3.3 V — read_u16 restituisce 0–65535 nell’intervallo 0–3.3 V al pin. Il pin AREF della scheda non è collegato, quindi il riferimento è sempre 3.3 V:
from machine import ADC
import time
adc = ADC("A0")
while True:
voltage = adc.read_u16() * 3.3 / 65535
print(voltage)
time.sleep_ms(100)
PWM¶
Pin |
Slice / canale |
|---|---|
TX |
PWM0 A |
RX |
PWM0 B |
D2 |
PWM4 B |
D3 |
PWM7 B |
D4 |
PWM0 A |
D5 |
PWM0 B |
D6 |
PWM1 A |
D7 |
PWM1 B |
D8 |
PWM2 A |
D9 |
PWM2 B |
D10 |
PWM2 B |
D11 |
PWM3 B |
D12 |
PWM2 A |
D13 |
PWM3 A |
D14 / A0 |
PWM5 A |
D15 / A1 |
PWM5 B |
D16 / A2 |
PWM6 A |
D17 / A3 |
PWM6 B |
D18 / A4 / SDA |
PWM6 A |
D19 / A5 / SCL |
PWM6 B |
Pilotare uno qualsiasi di essi tramite machine.PWM
from machine import Pin, PWM
pwm = PWM(Pin("D3"), freq=1_000, duty_u16=32768)
Nota
Diversi pin condividono i canali degli slice PWM:
PWM0 A è su
TXeD4.PWM0 B è su
RXeD5.PWM2 A è su
D8eD12.PWM2 B è su
D9eD10.PWM6 A è su
D16/A2eD18/A4/SDA.PWM6 B è su
D17/A3eD19/A5/SCL.
Scegliere un solo utilizzatore per canale di slice. I canali A e B all’interno dello stesso slice condividono il loro periodo (frequenza) ma ciascuno ha il proprio duty cycle.
Bus software bit‑banged¶
machine.SoftI2C e machine.SoftSPI funzionano su qualsiasi GPIO se serve un bus aggiuntivo.
Sensore termico (esterno)¶
Il firmware include il driver fir — driver del sensore termico (fir == far infrared) per un imager termico 8×8 AMG8833 collegato esternamente. Collegare il modulo al bus I²C elencato di seguito, quindi leggere i frame con fir.init() + fir.snapshot()
import time
import image
import fir
fir.init() # auto‑detects the sensor
clock = time.clock()
while True:
clock.tick()
try:
img = fir.snapshot(x_scale=5, y_scale=5,
color_palette=image.PALETTE_IRONBOW,
hint=image.BICUBIC,
copy_to_fb=True)
except OSError:
continue
print(clock.fps())
Il driver fir comunica con il sensore solo tramite I²C 0 — collegare il modulo ai pad serigrafati SCL / SDA. L’indirizzo a 7 bit del sensore (0x69) non deve essere utilizzato da nessun altro dispositivo su quel bus.
Temporizzazione¶
time¶
Il modulo time copre i ritardi bloccanti, i tick monotoni e la misurazione del tempo trascorso:
import time
time.sleep(1) # seconds
time.sleep_ms(500)
time.sleep_us(10)
start = time.ticks_ms()
# ...do work...
elapsed = time.ticks_diff(time.ticks_ms(), start)
Timer virtuali¶
machine.Timer pianifica callback periodici o one‑shot senza occupare uno slot di timer hardware. Passare -1 come id per utilizzare un timer virtuale (software):
from machine import Timer
one_shot = Timer(-1)
one_shot.init(period=5_000, mode=Timer.ONE_SHOT,
callback=lambda t: print("once"))
periodic = Timer(-1)
periodic.init(period=2_000, mode=Timer.PERIODIC,
callback=lambda t: print("tick"))
I valori del periodo sono in millisecondi. Chiamare deinit() per fermare e rilasciare lo slot.
Orologio in tempo reale¶
machine.RTC mantiene l’orario reale attraverso i reset. L’RTC del RP2040 è collegato all’oscillatore on‑chip e non sopravvive a una perdita totale di alimentazione — impostare l’orario a ogni avvio a freddo se è importante per la tua applicazione:
from machine import RTC
rtc = RTC()
rtc.datetime((2026, 4, 30, 4, 12, 0, 0, 0)) # Y, M, D, weekday, h, m, s, subsec
print(rtc.datetime())
Watchdog¶
machine.WDT resetta la scheda se l’applicazione si blocca. Una volta avviato non può essere fermato o riconfigurato — alimentarlo periodicamente all’interno del tuo loop principale:
from machine import WDT
wdt = WDT(timeout=5_000) # 5 second window
while True:
# ...do work...
wdt.feed()
Informazioni di boot e runtime¶
Aggiornamento del firmware (UF2)¶
Il Nano RP2040 Connect utilizza il doppio tap di reset standard di Arduino per entrare nel bootloader di Arduino. Premere rapidamente il pulsante reset due volte — la scheda si rienumera tramite USB come dispositivo UF2 e OpenMV IDE può flashare una nuova immagine firmware.
Uno script in esecuzione può rientrare nel bootloader su richiesta chiamando machine.bootloader()
import machine
machine.bootloader()
Filesystem e ordine di boot¶
Il firmware del Nano RP2040 Connect monta un singolo filesystem all’avvio:
Flash interna — sempre montata su
/flashe utilizzata come directory di lavoro. Contiene per impostazione predefinitamain.pyeREADME.txt; creata al primo avvio in assoluto.
Dopo il montaggio, l’interprete esegue quindi gli script da /flash:
boot.pyviene eseguito a ogni soft reset.main.pyviene eseguito solo all’avvio a freddo, immediatamente dopoboot.py.
Il main.py predefinito fornito su una scheda appena flashata si limita a far lampeggiare il canale blu del LED RGB utente come heartbeat (due impulsi brevi, breve pausa), così puoi capire che il firmware si è avviato correttamente senza alcun host collegato.
Quando è connessa tramite USB, /flash viene enumerata come unità di archiviazione di massa USB sull’host, consentendoti di modificare direttamente boot.py, main.py e qualsiasi altro file. Espellere l’unità prima di resettare la scheda in modo che l’host svuoti le scritture memorizzate nella cache.
Nota
Poiché il sistema operativo tratta l’unità come un dispositivo a blocchi passivo, i file creati o modificati dal codice in esecuzione sulla camera non compariranno finché l’host non rimonta l’unità. Se sia il sistema operativo sia la camera scrivono sullo stesso filesystem contemporaneamente, il sistema operativo prevarrà e sovrascriverà le modifiche apportate dalla camera. Utilizzare la scheda SD per qualsiasi dato che lo script scrive, e rimontare prima di leggere quei file dall’host.
Nota
Il canale rosso del LED RGB utente può accendersi brevemente mentre l’host legge o scrive sull’unità di archiviazione di massa USB — questo è un indicatore di attività pilotato dal firmware, non un guasto.
Dimensioni di archiviazione¶
Il Nano RP2040 Connect viene fornito con:
/flash— filesystem FAT da 14 MB, in lettura/scrittura.
La build del Nano RP2040 non include un ROMFS; distribuire i moduli Python e i modelli ML direttamente su /flash.
Librerie software¶
Consultare l”indice delle librerie per l’elenco completo dei moduli — inclusi quelli esclusivi della build del Nano RP2040 Connect.