Arduino Nano RP2040 Connect¶
Ostrzeżenie
Ta płytka nie jest już wspierana. Ostatnim wydaniem oprogramowania układowego OpenMV dla Arduino Nano RP2040 Connect jest wersja 4.7.0. Dla tego celu nie będą wydawane żadne dalsze aktualizacje oprogramowania układowego, poprawki błędów ani nowe funkcje. Poniższe informacje zachowano dla użytkowników korzystających z wersji 4.7.0 lub wcześniejszej.
Arduino Nano RP2040 Connect to płytka o wymiarach 45 × 18 mm w formacie Arduino Nano, zbudowana wokół układu Raspberry Pi RP2040 — dwurdzeniowego ARM Cortex‑M0+ taktowanego zegarem 133 MHz z 264 KB wewnętrznej pamięci SRAM. WiFi i BLE zapewnia moduł U‑blox NINA‑W102, a płytka jest wyposażona w 6‑osiowy IMU LSM6DSOX oraz mikrofon PDM MP34DT06. Oprogramowanie układowe OpenMV obsługuje je wszystkie z poziomu MicroPython.
Pełną dokumentację techniczną, zdjęcia i wymiary znajdziesz na stronie produktu Arduino Nano RP2040 Connect.
Najważniejsze cechy¶
Raspberry Pi RP2040 dwurdzeniowy ARM Cortex‑M0+ taktowany zegarem 133 MHz z 264 KB wewnętrznej pamięci SRAM.
16 MB zewnętrznej pamięci flash QSPI.
Moduł U‑blox NINA‑W102 zapewniający Wi‑Fi 2,4 GHz b/g/n oraz Bluetooth 4.2 (BR/EDR + LE).
6‑osiowy IMU LSM6DSOX oraz mikrofon PDM MP34DT06.
Złącze Micro USB do zasilania, programowania i obsługi REPL przez CDC.
22 piny I/O użytkownika na standardowych złączach Nano —
TX/RX,D2–D13(cyfrowe),A0–A7(analogowe).
Rozkład wyprowadzeń¶
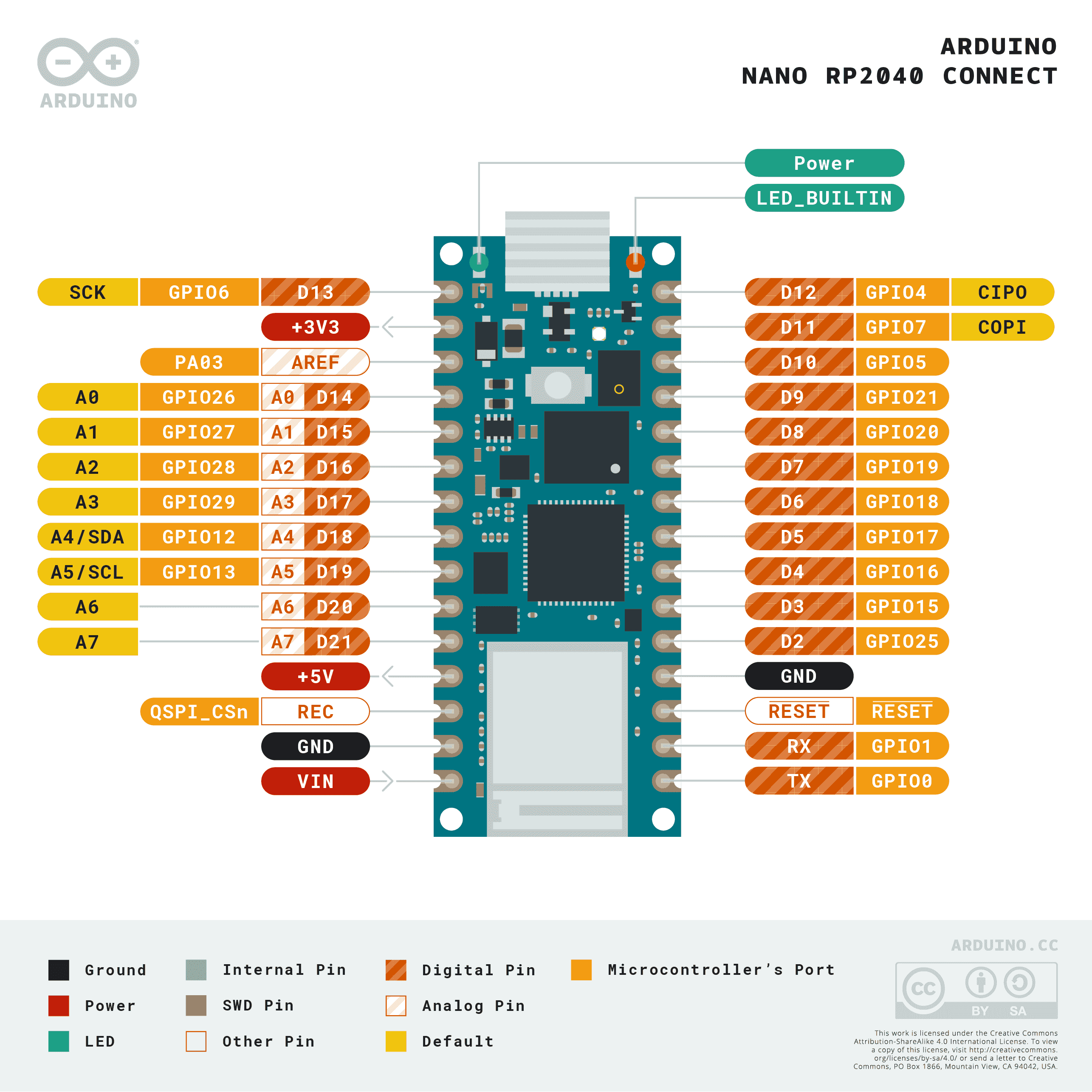
Opis wyprowadzeń¶
Nazwa pinu |
Odniesienie |
Funkcja |
|---|---|---|
TX |
3,3 V |
UART0 TX / SPI0 RX / I2C0 SDA / PWM0 A |
RX |
3,3 V |
UART0 RX / SPI0 CS / I2C0 SCL / PWM0 B |
D2 |
3,3 V |
SPI1 CS / UART1 RX / I2C0 SCL / PWM4 B |
D3 |
3,3 V |
SPI1 TX / UART0 RTS / I2C1 SCL / PWM7 B |
D4 |
3,3 V |
SPI0 RX / UART0 TX / I2C0 SDA / PWM0 A |
D5 |
3,3 V |
SPI0 CS / UART0 RX / I2C0 SCL / PWM0 B |
D6 |
3,3 V |
SPI0 SCK / UART0 CTS / I2C1 SDA / PWM1 A |
D7 |
3,3 V |
SPI0 TX / UART0 RTS / I2C1 SCL / PWM1 B |
D8 |
3,3 V |
SPI0 RX / UART1 TX / I2C0 SDA / PWM2 A |
D9 |
3,3 V |
SPI0 CS / UART1 RX / I2C0 SCL / PWM2 B |
D10 |
3,3 V |
SPI0 CS / UART1 RX / I2C0 SCL / PWM2 B |
D11 |
3,3 V |
SPI0 TX / UART1 RTS / I2C1 SCL / PWM3 B |
D12 |
3,3 V |
SPI0 RX / UART1 TX / I2C0 SDA / PWM2 A |
D13 |
3,3 V |
SPI0 SCK / UART1 CTS / I2C1 SDA / PWM3 A |
D14 / A0 |
3,3 V |
ADC / SPI1 SCK / UART1 CTS / I2C1 SDA / PWM5 A |
D15 / A1 |
3,3 V |
ADC / SPI1 TX / UART1 RTS / I2C1 SCL / PWM5 B |
D16 / A2 |
3,3 V |
ADC / SPI1 RX / UART0 TX / I2C0 SDA / PWM6 A |
D17 / A3 |
3,3 V |
ADC / SPI1 CS / UART0 RX / I2C0 SCL / PWM6 B |
D18 / A4 / SDA |
3,3 V |
ADC / I2C0 SDA / SPI1 RX / UART0 TX / PWM6 A |
D19 / A5 / SCL |
3,3 V |
ADC / I2C0 SCL / SPI1 CS / UART0 RX / PWM6 B |
D20 / A6 |
3,3 V |
ADC / GPIO |
D21 / A7 |
3,3 V |
ADC / GPIO |
RESET |
3,3 V |
naciśnij przycisk RESET na płytce lub zewrzyj do GND, aby zresetować |
REC |
3,3 V |
BOOTSEL — podciągnij do stanu wysokiego przy włączaniu zasilania, aby wejść do bootloadera ROM układu RP2040 |
LED_BUILTIN |
— |
Pomarańczowa dioda LED użytkownika na |
LED_RED |
— |
Czerwony kanał diody RGB |
LED_GREEN |
— |
Zielony kanał diody RGB |
LED_BLUE |
— |
Niebieski kanał diody RGB |
Ostrzeżenie
Piny I/O płytki Nano RP2040 Connect pracują wyłącznie przy 3,3 V — nie są tolerancyjne na 5 V. Podanie na nie 5 V uszkodzi układ RP2040.
Piny zasilania¶
VIN — wejście 4 – 20 V. Zasila płytkę poprzez wbudowany przetwornik impulsowy. Jest również podawane przez diodę z szyny USB 5 V, więc USB i
VINmogą być obecne jednocześnie bez wzajemnego wstecznego zasilania.+5V — domyślnie niepodłączone.
+3V3 — wyjście stabilizatora 3,3 V.
AREF — pin analogowego napięcia odniesienia. Na tej płytce nie jest połączony z RP2040 — ADC zawsze odnosi się do 3,3 V.
GND — wspólna masa.
Płytkę Nano RP2040 Connect można zasilać jedną z dwóch ścieżek:
Micro USB — dostarcza 5 V do wbudowanego stabilizatora.
Pin VIN — podaj stabilizowane zasilanie 4 – 20 V.
Informacja
Zworka lutownicza na spodzie płytki łączy +5V z szyną USB 5 V. Zamknij ją, aby pin złącza +5V faktycznie przewodził 5 V.
Informacja
Normalnie zamkniętą zworkę lutowniczą na wyjściu wbudowanego przetwornika impulsowego 4–20 V można przeciąć, aby wyłączyć stabilizator, dzięki czemu płytkę można zasilać bezpośrednio z zewnętrznego źródła 3,3 V na +3V3.
Piny do odzyskiwania i debugowania¶
RESET — zarówno wyprowadzony pad, jak i chwilowy przycisk RESET na górze płytki, połączony z linią NRST układu RP2040. Zewrzyj do GND lub naciśnij przycisk, aby zresetować.
REC — wyprowadzony pad. Przytrzymanie
RECw stanie wysokim przy włączaniu zasilania (lub podczas naciskania RESET) wprowadza RP2040 do bootloadera ROM; płytka ponownie wykrywa się jako napęd pamięci masowej USB o nazwieRPI-RP2i akceptuje obraz oprogramowania układowego.uf2.
Płytka Nano RP2040 Connect używa standardowego mechanizmu podwójnego naciśnięcia reset Arduino, aby wejść do bootloadera Arduino. Naciśnij szybko dwukrotnie przycisk RESET — płytka ponownie wykrywa się przez USB jako urządzenie UF2, a OpenMV IDE może wgrać nowy obraz oprogramowania układowego.
Sygnały SWD układu RP2040 są wyprowadzone na powlekane pady z tyłu płytki, tuż pod modułem NINA. Wszystkie sygnały debugowania mają napięcie odniesienia 3,3 V.
Wbudowane urządzenia peryferyjne¶
Diody LED¶
Płytka Nano RP2040 Connect ma diodę RGB użytkownika — sterowaną przez opisane na nadruku kanały LED_RED, LED_GREEN i LED_BLUE — oraz osobną pomarańczową diodę LED_BUILTIN na D13. Wszystkie cztery można sterować programowo poprzez machine.LED
from machine import LED
LED("LED_RED").on()
LED("LED_GREEN").on()
LED("LED_BLUE").on()
LED("LED_BUILTIN").on()
Osobna zielona dioda zasilania na płytce świeci się, gdy tylko szyna +3,3 V jest aktywna, i nie jest sterowana przez użytkownika.
Sensor kamery¶
Oprogramowanie układowe OpenMV na płytce Nano RP2040 Connect obsługuje równoległy sensor CMOS OmniVision OV7670. Płytka nie ma wbudowanego sensora obrazu — podłącz moduł OV7670 do opisanych na nadruku pinów złącza wymienionych poniżej i steruj nim poprzez moduł csi — sensory kamery
import csi
cam = csi.CSI()
cam.reset()
cam.pixformat(csi.RGB565)
cam.framesize(csi.QVGA)
cam.snapshot(time=2000) # let auto‑exposure settle
while True:
img = cam.snapshot()
Informacja
OV7670 zajmuje 14 pinów. Oprogramowanie układowe łączy je następująco:
Sygnał sensora |
Pin Nano RP2040 |
|---|---|
D0 |
|
D1 |
|
D2 |
|
D3 |
|
D4 |
|
D5 |
|
D6 |
|
D7 |
|
HSYNC |
|
VSYNC |
|
PXCLK |
|
MXCLK |
|
POWER |
|
RESET |
|
SCL |
|
SDA |
|
Magistrala sterująca I²C układu OV7670 jest współdzielona z wbudowanym IMU oraz ATECC608A na I²C 0. Sensor znajduje się pod 7‑bitowym adresem 0x21 — urządzenia użytkownika na magistrali 0 muszą również unikać tego adresu, gdy kamera jest podłączona.
IMU¶
Wbudowany 6‑osiowy akcelerometr + żyroskop LSM6DSOX znajduje się na I2C0. Domyślnie machine.I2C(0) portu rp2 używa innego zestawu pinów, więc przekaż jawnie opisane na nadruku pady SDA/SCL. Użyj wbudowanego sterownika lsm6dsox.LSM6DSOX
import time
from machine import I2C, Pin
from lsm6dsox import LSM6DSOX
bus = I2C(0, scl=Pin("SCL"), sda=Pin("SDA"))
imu = LSM6DSOX(bus)
while True:
print(imu.accel()) # (x, y, z) in g
print(imu.gyro()) # (x, y, z) in deg/s
time.sleep_ms(100)
Mikrofon¶
Wbudowany mikrofon PDM MP34DT06 jest przechwytywany przez audio — Moduł Audio z użyciem jednego z bloków PIO układu RP2040:
import audio
from ulab import numpy as np
def loudness(pcmbuf):
samples = np.array(np.frombuffer(pcmbuf, dtype=np.int16), dtype=np.float)
rms = np.sqrt(np.mean(samples ** 2))
if rms > 10000:
print("Loud!", int(rms))
audio.init(channels=1, frequency=16000, gain_db=24)
audio.start_streaming(loudness)
while True:
pass
Wi‑Fi¶
Wbudowany moduł NINA‑W102 jest udostępniany poprzez network — konfiguracja sieci jako interfejs stacji:
import network, time
wlan = network.WLAN(network.STA_IF)
wlan.active(True)
wlan.connect("ssid", "password")
while not wlan.isconnected():
time.sleep(1)
print("Wi‑Fi IP:", wlan.ipconfig("addr4")[0])
Bluetooth¶
Ten sam moduł NINA udostępnia również Bluetooth 4.2 LE. Użyj aioble — Asynchroniczne BLE do obsługi BLE w stylu asyncio — na przykład, aby rozgłaszać się jako urządzenie peryferyjne i czekać na połączenie urządzenia centralnego:
import asyncio
import aioble
async def run():
while True:
conn = await aioble.advertise(250_000, name="Nano-RP2040")
print("Connected:", conn.device)
await conn.disconnected()
asyncio.run(run())
Opis magistral¶
GPIO¶
Użyj machine.Pin, aby odczytywać lub sterować dowolnym z opisanych na nadruku pinów. Wyjścia to 3,3 V CMOS, łączny prąd zatapiający 50 mA na wszystkich GPIO.
from machine import Pin
out = Pin("D2", Pin.OUT)
out.on()
out.off()
out.value(1)
inp = Pin("D3", Pin.IN, Pin.PULL_UP)
print(inp.value())
Każdy pin wejściowy może również wyzwalać przerwanie przy zboczach sygnału:
def handler(pin):
print("triggered:", pin)
Pin("D3", Pin.IN, Pin.PULL_UP).irq(
handler, Pin.IRQ_FALLING | Pin.IRQ_RISING,
)
UART¶
Magistrala |
TX |
RX |
|---|---|---|
UART0 |
TX |
RX |
Użyj nazw z nadruku TX/RX z machine.UART
from machine import UART
uart = UART(0, baudrate=115200)
uart.write("hello")
uart.read(5)
Informacja
machine.UART(1) istnieje, ale jest zarezerwowany dla wbudowanego modułu NINA‑W102 (łącze BLE); nie używaj go bezpośrednio.
I²C¶
Magistrala |
SDA |
SCL |
|---|---|---|
I2C0 |
|
|
I2C1 |
|
|
Obie magistrale wymagają jawnego przekazania swoich pinów do machine.I2C
from machine import I2C, Pin
bus0 = I2C(0, scl=Pin("SCL"), sda=Pin("SDA"), freq=400_000)
bus0.scan()
bus1 = I2C(1, scl=Pin("A1"), sda=Pin("A0"), freq=400_000)
bus1.scan()
Informacja
Dwa wbudowane układy współdzielą magistralę 0 — urządzenia użytkownika na tej magistrali muszą unikać ich adresów:
0x6A— IMU LSM6DSOX0x60— ATECC608A‑MAHDA‑T
Użycie A0/A1 jako I²C zajmuje je na potrzeby magistrali, więc nie mogą jednocześnie być wejściami ADC.
Informacja
Pady SDA / SCL (magistrala 0) mają wbudowane rezystory podciągające do 3,3 V, więc dla urządzeń na tej magistrali nie są potrzebne zewnętrzne rezystory podciągające. A0 / A1 (magistrala 1) ich nie mają — dodaj zewnętrzne rezystory podciągające przy korzystaniu z magistrali 1.
Ten sam sprzęt można również wykorzystać w trybie celu (slave) poprzez machine.I2CTarget, aby udostępnić obszar pamięci innemu kontrolerowi I²C:
from machine import I2CTarget
buf = bytearray(32)
target = I2CTarget(0, addr=0x42, mem=buf)
SPI¶
Magistrala |
MOSI |
MISO |
SCK |
CS |
|---|---|---|---|---|
SPI0 |
D11 |
D12 |
D13 |
D10 |
Port rp2 nie konfiguruje wstępnie pinów SPI0 na tej płytce, więc przy tworzeniu magistrali przekaż jawnie opisane na nadruku pady:
from machine import SPI, Pin
spi = SPI(0, baudrate=10_000_000,
sck=Pin("D13"), mosi=Pin("D11"), miso=Pin("D12"))
cs = Pin("D10", Pin.OUT, value=1) # CS is not driven by the SPI peripheral
cs.value(0)
spi.write(b"hello")
cs.value(1)
Informacja
D13 pełni jednocześnie rolę pomarańczowej diody LED_BUILTIN — sterowanie SPI na tej magistrali będzie migać diodą w rytm zegara magistrali.
Informacja
machine.SPI(1) istnieje, ale jest zarezerwowany dla wbudowanego modułu NINA‑W102 (łącze SPI Wi-Fi/BLE); nie używaj go bezpośrednio.
ADC¶
RP2040 ma cztery 12‑bitowe kanały ADC wyprowadzone na A0–A3, wszystkie z napięciem odniesienia 3,3 V — read_u16 zwraca 0–65535 w zakresie 0–3,3 V na pinie. Pin AREF płytki nie jest połączony, więc napięciem odniesienia jest zawsze 3,3 V:
from machine import ADC
import time
adc = ADC("A0")
while True:
voltage = adc.read_u16() * 3.3 / 65535
print(voltage)
time.sleep_ms(100)
PWM¶
Pin |
Wycinek / kanał |
|---|---|
TX |
PWM0 A |
RX |
PWM0 B |
D2 |
PWM4 B |
D3 |
PWM7 B |
D4 |
PWM0 A |
D5 |
PWM0 B |
D6 |
PWM1 A |
D7 |
PWM1 B |
D8 |
PWM2 A |
D9 |
PWM2 B |
D10 |
PWM2 B |
D11 |
PWM3 B |
D12 |
PWM2 A |
D13 |
PWM3 A |
D14 / A0 |
PWM5 A |
D15 / A1 |
PWM5 B |
D16 / A2 |
PWM6 A |
D17 / A3 |
PWM6 B |
D18 / A4 / SDA |
PWM6 A |
D19 / A5 / SCL |
PWM6 B |
Steruj dowolnym z nich poprzez machine.PWM
from machine import Pin, PWM
pwm = PWM(Pin("D3"), freq=1_000, duty_u16=32768)
Informacja
Kilka pinów współdzieli kanały wycinków PWM:
PWM0 A jest na
TXorazD4.PWM0 B jest na
RXorazD5.PWM2 A jest na
D8orazD12.PWM2 B jest na
D9orazD10.PWM6 A jest na
D16/A2orazD18/A4/SDA.PWM6 B jest na
D17/A3orazD19/A5/SCL.
Wybierz jednego odbiorcę na kanał wycinka. Kanały A i B w obrębie tego samego wycinka współdzielą okres (częstotliwość), ale każdy ma własny współczynnik wypełnienia.
Programowo emulowane magistrale (bit‑banging)¶
machine.SoftI2C i machine.SoftSPI działają na dowolnym GPIO, jeśli potrzebujesz dodatkowej magistrali.
Sensor termiczny (zewnętrzny)¶
Oprogramowanie układowe zawiera sterownik fir — sterownik sensora termicznego (fir == far infrared, daleka podczerwień) dla zewnętrznie podłączonego kamery termowizyjnej AMG8833 8×8. Podłącz moduł do magistrali I²C wymienionej poniżej, a następnie odczytuj ramki za pomocą fir.init() + fir.snapshot()
import time
import image
import fir
fir.init() # auto‑detects the sensor
clock = time.clock()
while True:
clock.tick()
try:
img = fir.snapshot(x_scale=5, y_scale=5,
color_palette=image.PALETTE_IRONBOW,
hint=image.BICUBIC,
copy_to_fb=True)
except OSError:
continue
print(clock.fps())
Sterownik fir komunikuje się z sensorem wyłącznie przez I²C 0 — podłącz moduł do opisanych na nadruku padów SCL / SDA. 7‑bitowy adres sensora (0x69) nie może być używany przez żadne inne urządzenie na tej magistrali.
Czasowanie¶
time¶
Moduł time obejmuje blokujące opóźnienia, monotoniczne takty oraz pomiar upływającego czasu:
import time
time.sleep(1) # seconds
time.sleep_ms(500)
time.sleep_us(10)
start = time.ticks_ms()
# ...do work...
elapsed = time.ticks_diff(time.ticks_ms(), start)
Wirtualne liczniki czasu¶
machine.Timer planuje okresowe lub jednorazowe wywołania zwrotne bez zajmowania sprzętowego slotu licznika czasu. Przekaż -1 jako id, aby użyć wirtualnego (programowego) licznika czasu:
from machine import Timer
one_shot = Timer(-1)
one_shot.init(period=5_000, mode=Timer.ONE_SHOT,
callback=lambda t: print("once"))
periodic = Timer(-1)
periodic.init(period=2_000, mode=Timer.PERIODIC,
callback=lambda t: print("tick"))
Wartości okresu podawane są w milisekundach. Wywołaj deinit(), aby zatrzymać i zwolnić slot.
Zegar czasu rzeczywistego¶
machine.RTC utrzymuje czas zegarowy między resetami. RTC układu RP2040 jest powiązany z oscylatorem na chipie i nie przetrwa całkowitej utraty zasilania — ustawiaj czas przy każdym zimnym rozruchu, jeśli ma to znaczenie dla twojej aplikacji:
from machine import RTC
rtc = RTC()
rtc.datetime((2026, 4, 30, 4, 12, 0, 0, 0)) # Y, M, D, weekday, h, m, s, subsec
print(rtc.datetime())
Watchdog¶
machine.WDT resetuje płytkę, jeśli aplikacja się zawiesi. Po uruchomieniu nie można go zatrzymać ani przekonfigurować — karm go okresowo wewnątrz głównej pętli:
from machine import WDT
wdt = WDT(timeout=5_000) # 5 second window
while True:
# ...do work...
wdt.feed()
Informacje o rozruchu i działaniu¶
Aktualizacja oprogramowania układowego (UF2)¶
Płytka Nano RP2040 Connect używa standardowego mechanizmu podwójnego naciśnięcia reset Arduino, aby wejść do bootloadera Arduino. Naciśnij szybko dwukrotnie przycisk reset — płytka ponownie wykrywa się przez USB jako urządzenie UF2, a OpenMV IDE może wgrać nowy obraz oprogramowania układowego.
Działający skrypt może na żądanie ponownie wejść do bootloadera, wywołując machine.bootloader()
import machine
machine.bootloader()
System plików i kolejność rozruchu¶
Oprogramowanie układowe Nano RP2040 Connect montuje podczas rozruchu pojedynczy system plików:
Wewnętrzna pamięć flash — zawsze montowana w
/flashi używana jako katalog roboczy. Domyślnie zawieramain.pyiREADME.txt; tworzona przy samym pierwszym rozruchu.
Po zamontowaniu interpreter uruchamia następnie skrypty z /flash:
boot.pyjest wykonywany przy każdym miękkim resecie.main.pyjest wykonywany tylko przy zimnym rozruchu, bezpośrednio poboot.py.
Domyślny main.py dostarczany na świeżo zaprogramowanej płytce po prostu miga niebieskim kanałem diody RGB użytkownika jako sygnałem życia (dwa krótkie impulsy, krótka przerwa), dzięki czemu można rozpoznać, że oprogramowanie układowe uruchomiło się prawidłowo bez podłączonego hosta.
Po podłączeniu przez USB /flash wykrywa się na hoście jako napęd pamięci masowej USB, co pozwala bezpośrednio edytować boot.py, main.py i wszelkie inne pliki. Wysuń napęd przed zresetowaniem płytki, aby host opróżnił buforowane zapisy.
Informacja
Ponieważ system operacyjny traktuje napęd jako pasywne urządzenie blokowe, pliki utworzone lub zmodyfikowane przez kod działający na kamerze nie pojawią się, dopóki host ponownie nie zamontuje napędu. Jeśli zarówno system operacyjny, jak i kamera zapisują w tym samym systemie plików w tym samym czasie, system operacyjny wygra i nadpisze zmiany wprowadzone przez kamerę. Używaj karty SD do wszelkich danych zapisywanych przez skrypt i montuj ponownie przed odczytaniem tych plików z hosta.
Informacja
Czerwony kanał diody RGB użytkownika może na krótko zaświecić się, gdy host odczytuje dane z napędu pamięci masowej USB lub zapisuje na nim — jest to wskaźnik aktywności sterowany przez oprogramowanie układowe, a nie awaria.
Rozmiary pamięci masowej¶
Płytka Nano RP2040 Connect jest dostarczana z:
/flash— system plików FAT o pojemności 14 MB, do odczytu/zapisu.
Kompilacja Nano RP2040 nie zawiera ROMFS; dostarczaj moduły Python i modele ML bezpośrednio na /flash.
Biblioteki programowe¶
Pełną listę modułów znajdziesz w indeksie bibliotek — w tym informacje o tym, które z nich są unikalne dla kompilacji Nano RP2040 Connect.