Arduino Nano 33 BLE Sense¶
Ostrzeżenie
Ta płytka nie jest już wspierana. Ostatnim wydaniem oprogramowania układowego OpenMV dla Arduino Nano 33 BLE Sense jest 4.7.0. Dla tego celu nie będą wydawane żadne dalsze aktualizacje oprogramowania układowego, poprawki błędów ani nowe funkcje. Poniższe informacje zachowano dla użytkowników korzystających z wersji 4.7.0 lub wcześniejszej.
Arduino Nano 33 BLE Sense to płytka o wymiarach 45 × 18 mm w formacie Arduino-Nano, zbudowana wokół układu Nordic Semiconductor nRF52840 — pojedynczego rdzenia ARM Cortex-M4 z FPU taktowanego zegarem 64 MHz, z 256 KB wewnętrznej pamięci SRAM i 1 MB wewnętrznej pamięci flash. BLE pochodzi z radia zintegrowanego w układzie, a płytka jest wyposażona w 9-osiowy IMU, barometr LPS22HB, sensor temperatury / wilgotności HTS221 / HS3003, sensor światła otoczenia / koloru / zbliżeniowy / gestów APDS9960 oraz mikrofon PDM MP34DT05. Oprogramowanie układowe OpenMV obsługuje je wszystkie z poziomu MicroPython.
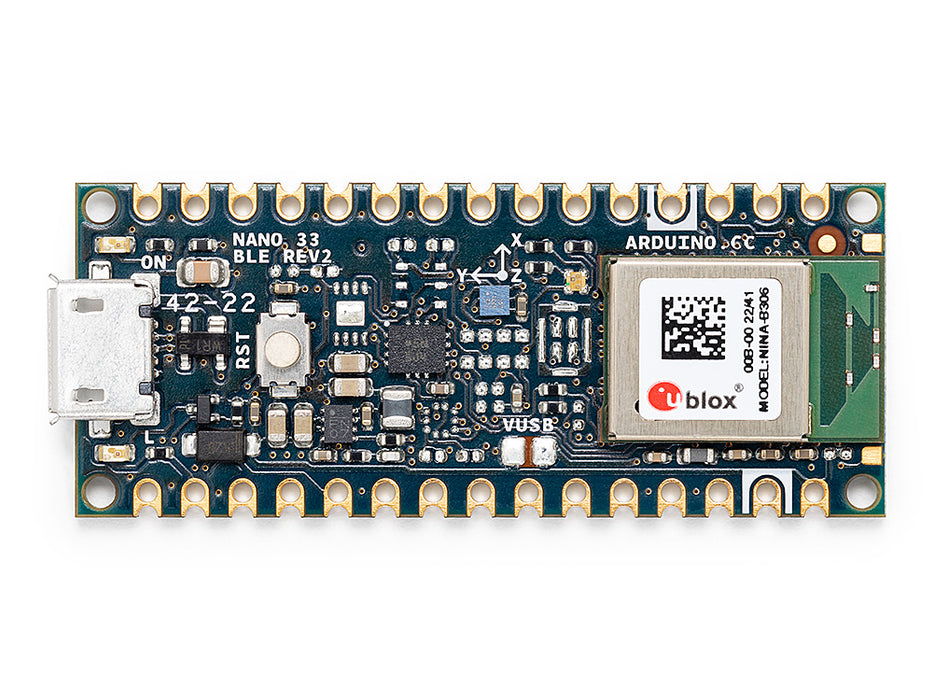
Pełną kartę katalogową, zdjęcia i wymiary znajdziesz na stronie produktu Arduino Nano 33 BLE Rev2.
Najważniejsze cechy¶
Nordic nRF52840 Cortex-M4 z FPU o taktowaniu 64 MHz, z 256 KB wewnętrznej pamięci SRAM i 1 MB wewnętrznej pamięci flash.
Bluetooth LE 5.0 dzięki radiu zintegrowanemu w układzie i Nordic SoftDevice s140.
9-osiowy IMU —
LSM9DS1w Rev 1,BMI270+BMM150w Rev 2. Wbudowany sterownikimuwykrywa oba przy starcie.Barometr
LPS22HB, sensor temperatury i wilgotnościHTS221/HS3003, sensor światła otoczenia / koloru / zbliżeniowy / gestówAPDS9960oraz mikrofon PDM MP34DT05.Złącze Micro USB do zasilania, programowania i obsługi REPL przez CDC.
22 pinów wejścia/wyjścia użytkownika na standardowych złączach Nano —
TX/RX,D2–D13(cyfrowe),A0–A7(analogowe).
Rozkład wyprowadzeń¶
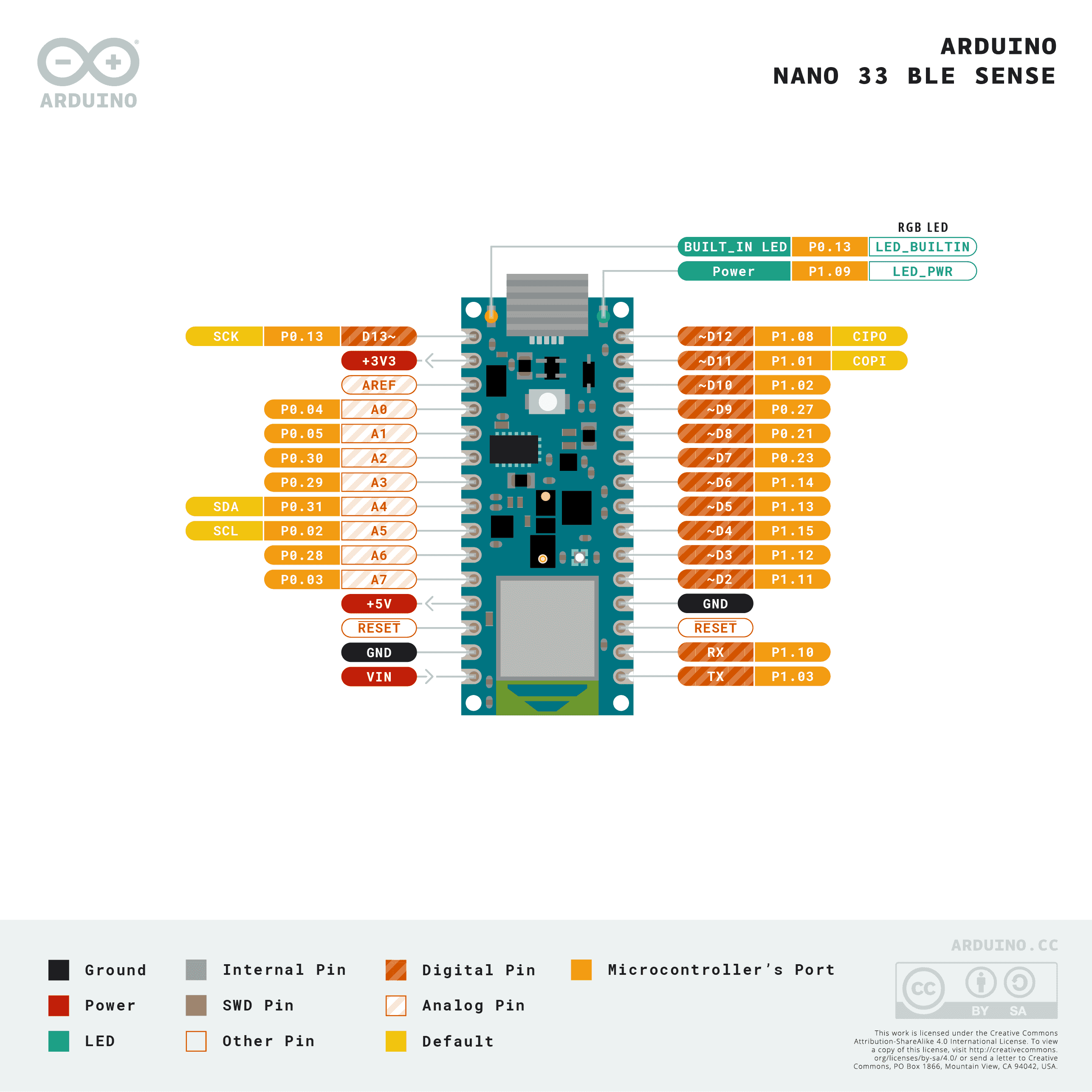
Opis wyprowadzeń¶
Nazwa pinu |
Odniesienie |
Funkcja |
|---|---|---|
TX |
3.3 V |
UART1 TX |
RX |
3.3 V |
UART1 RX |
D2 |
3.3 V |
PWM |
D3 |
3.3 V |
PWM |
D4 |
3.3 V |
PWM |
D5 |
3.3 V |
PWM |
D6 |
3.3 V |
PWM |
D7 |
3.3 V |
PWM |
D8 |
3.3 V |
PWM |
D9 |
3.3 V |
PWM |
D10 |
3.3 V |
PWM |
D11 |
3.3 V |
PWM / SPI0 MOSI |
D12 |
3.3 V |
PWM / SPI0 MISO |
D13 |
3.3 V |
PWM / SPI0 SCK |
A0 |
3.3 V |
ADC / PWM |
A1 |
3.3 V |
ADC / PWM |
A2 |
3.3 V |
ADC / PWM |
A3 |
3.3 V |
ADC / PWM |
A4 / I2C_SDA |
3.3 V |
ADC / PWM / I2C0 SDA |
A5 / I2C_SCL |
3.3 V |
ADC / PWM / I2C0 SCL |
A6 |
3.3 V |
ADC / PWM |
A7 |
3.3 V |
ADC / PWM |
RESET |
3.3 V |
naciśnij wbudowany przycisk RESET lub zewrzyj do GND, aby zresetować |
LED_BUILTIN |
— |
Pomarańczowa dioda LED użytkownika na |
LED_RED |
— |
Czerwony kanał diody RGB LED (aktywny stanem niskim) |
LED_GREEN |
— |
Zielony kanał diody RGB LED (aktywny stanem niskim) |
LED_BLUE |
— |
Niebieski kanał diody RGB LED (aktywny stanem niskim) |
Ostrzeżenie
Piny wejścia/wyjścia Nano 33 BLE Sense pracują wyłącznie z napięciem 3.3 V — nie są tolerancyjne na 5 V. Podanie na nie 5 V uszkodzi układ nRF52840.
Piny zasilania¶
VIN — wejście 4.5 – 21 V. Zasila płytkę przez wbudowany stabilizator. Jest również podawane przez diodę z szyny 5 V z USB, dzięki czemu USB i
VINmogą być obecne jednocześnie bez wzajemnego oddziaływania zwrotnego.+5V — domyślnie niepodłączone.
+3V3 — wyjście stabilizatora 3.3 V.
AREF — pin analogowego napięcia odniesienia. Na tej płytce nie jest podłączony do nRF52840 — ADC zawsze odnosi się do 3.3 V.
GND — wspólna masa.
Nano 33 BLE Sense można zasilać jedną z dwóch dróg:
Micro USB — dostarcza 5 V do wbudowanego stabilizatora.
Pin VIN — podaj ustabilizowane napięcie 4.5 – 21 V.
Informacja
Zworka lutownicza na spodzie płytki oznaczona VUSB łączy +5V z szyną 5 V z USB. Zewrzyj ją, aby pin nagłówka +5V faktycznie przenosił 5 V.
Informacja
Normalnie zwartą zworkę lutowniczą na wyjściu wbudowanego impulsowego stabilizatora 4.5–21 V można przeciąć, aby wyłączyć stabilizator, dzięki czemu płytkę można zasilać bezpośrednio z zewnętrznego źródła 3.3 V na pinie +3V3.
Piny do odzyskiwania i debugowania¶
RESET — zarówno odsłonięte pole lutownicze, jak i chwilowy przycisk RESET na górze płytki, połączone z linią resetu nRF52840. Zewrzyj do GND lub naciśnij przycisk, aby zresetować.
Nano 33 BLE Sense używa standardowego dla Arduino podwójnego naciśnięcia resetu, aby wejść do bootloadera Arduino. Naciśnij szybko dwukrotnie przycisk RESET — płytka przejdzie w tryb bootloadera, a OpenMV IDE może wgrać nowy obraz oprogramowania układowego.
Sygnały SWD układu nRF52840 są wyprowadzone na pokrytych metalem polach z tyłu płytki. Wszystkie sygnały debugowania odnoszą się do 3.3 V.
Wbudowane urządzenia peryferyjne¶
Diody LED¶
Nano 33 BLE Sense ma diodę RGB LED użytkownika — sterowaną przez opisane na nadruku kanały LED_RED, LED_GREEN i LED_BLUE — oraz osobną pomarańczową diodę LED_BUILTIN na D13. Wszystkie cztery można sterować programowo przez machine.LED
from machine import LED
LED("LED_RED").on()
LED("LED_GREEN").on()
LED("LED_BLUE").on()
LED("LED_BUILTIN").on()
Osobna zielona dioda zasilania na płytce świeci zawsze, gdy szyna +3.3 V jest aktywna, i nie jest sterowalna przez użytkownika.
Sensor kamery¶
Oprogramowanie układowe OpenMV na Nano 33 BLE Sense obsługuje równoległy sensor CMOS OmniVision OV7670. Płytka nie ma wbudowanego sensora obrazu — podłącz moduł OV7670 do opisanych na nadruku pinów nagłówka wymienionych poniżej i steruj nim przez moduł csi — sensory kamery
import csi
cam = csi.CSI()
cam.reset()
cam.pixformat(csi.RGB565)
cam.framesize(csi.QVGA)
cam.snapshot(time=2000) # let auto‑exposure settle
while True:
img = cam.snapshot()
Informacja
OV7670 zajmuje 14 pinów. Oprogramowanie układowe podłącza je w następujący sposób:
Sygnał sensora |
Pin Nano 33 BLE Sense |
|---|---|
D0 |
|
D1 |
|
D2 |
|
D3 |
|
D4 |
|
D5 |
|
D6 |
|
D7 |
|
HSYNC |
|
VSYNC |
|
PXCLK |
|
MXCLK |
|
POWER |
|
RESET |
|
SCL |
|
SDA |
|
Magistrala sterująca I²C układu OV7670 to ta sama zewnętrzna magistrala I²C 0 wyprowadzona na A5/A4. Sensor znajduje się pod 7-bitowym adresem 0x21 — urządzenia użytkownika na tej magistrali muszą unikać tego adresu, gdy kamera jest podłączona.
IMU¶
9-osiowy IMU jest udostępniany przez wbudowany moduł imu, który automatycznie wykrywa, czy płytka ma LSM9DS1 (Rev 1), czy BMI270 + BMM150 (Rev 2), i prezentuje ujednoliconą klasę imu.IMU. Sensory znajdują się na wewnętrznej magistrali I²C 1 (P14 / P15):
import time
from machine import I2C, Pin
from imu import IMU
bus = I2C(1, scl=Pin("P15"), sda=Pin("P14"))
sensor = IMU(bus)
while True:
print(sensor.accel()) # (x, y, z) in g
print(sensor.gyro()) # (x, y, z) in deg/s
print(sensor.magnet()) # (x, y, z) magnetometer
time.sleep_ms(100)
Aby uzyskać bezpośredni dostęp do funkcji takich jak wykrywanie stuknięć czy FIFO, zaimportuj odpowiedni wbudowany sterownik (lsm9ds1, bmi270 lub bmm150) i utwórz jego instancję na tej samej magistrali.
Sensory środowiskowe¶
Barometr (LPS22HB) oraz sensor temperatury / wilgotności (HTS221 w Rev 1, HS3003 w Rev 2) współdzielą tę samą wewnętrzną magistralę I²C 1 co IMU:
import time
from machine import I2C, Pin
from lps22h import LPS22H
from hts221 import HTS221
bus = I2C(1, scl=Pin("P15"), sda=Pin("P14"))
lps = LPS22H(bus)
try:
hts = HTS221(bus)
except OSError:
from hs3003 import HS3003
hts = HS3003(bus)
while True:
print("pressure: %.2f hPa" % lps.pressure())
print("temperature: %.2f C" % lps.temperature())
print("humidity: %.2f %%" % hts.humidity())
time.sleep_ms(500)
Światło / kolor / zbliżenie / gesty¶
Układ Broadcom APDS9960 znajduje się na tej samej wewnętrznej magistrali I²C 1 i zapewnia pomiar światła otoczenia, koloru RGB, zbliżenia oraz wykrywanie gestów:
import time
from machine import I2C, Pin
from apds9960 import uAPDS9960 as APDS9960
bus = I2C(1, scl=Pin("P15"), sda=Pin("P14"))
apds = APDS9960(bus)
apds.enableLightSensor()
while True:
print("ambient light:", apds.readAmbientLight())
time.sleep_ms(250)
Mikrofon¶
Wbudowany mikrofon PDM MP34DT05 jest przechwytywany przez audio — Moduł Audio. Każdy bufor przychodzi jako 16-bitowy PCM ze znakiem w postaci bytearray, gotowy do przekazania do ulab/numpy w celu przetwarzania DSP:
import audio
from ulab import numpy as np
def loudness(pcmbuf):
samples = np.array(np.frombuffer(pcmbuf, dtype=np.int16), dtype=np.float)
rms = np.sqrt(np.mean(samples ** 2))
if rms > 10000:
print("Loud!", int(rms))
audio.init(channels=1, frequency=16000, gain_db=24)
audio.start_streaming(loudness)
while True:
pass
Bluetooth¶
Radio Bluetooth LE 5.0 układu nRF52840 działa na Nordic SoftDevice s140 i jest udostępniane przez starszy moduł ubluepy — nowoczesne API bluetooth / aioble — Asynchroniczne BLE nie są włączone w tej kompilacji. Dostępne są zarówno role peripheral (serwer GATT, rozgłaszanie), jak i central (obserwator / skaner GAP + łączenie).
Rozgłaszanie jako peripheral z pojedynczą usługą Environmental Sensing i powiadamialną charakterystyką temperatury — wywołanie zwrotne event_handler uruchamia się przy połączeniu, rozłączeniu i zapisach CCCD:
from ubluepy import Service, Characteristic, UUID, Peripheral, constants
from machine import LED
def event_handler(event_id, handle, data):
if event_id == constants.EVT_GAP_CONNECTED:
LED("LED_GREEN").on()
elif event_id == constants.EVT_GAP_DISCONNECTED:
LED("LED_GREEN").off()
periph.advertise(device_name="Nano 33", services=[svc])
svc = Service(UUID("181A")) # Environmental Sensing
char = Characteristic(UUID("2A6E"), # Temperature
props=Characteristic.PROP_NOTIFY | Characteristic.PROP_READ,
attrs=Characteristic.ATTR_CCCD)
svc.addCharacteristic(char)
periph = Peripheral()
periph.addService(svc)
periph.setConnectionHandler(event_handler)
periph.advertise(device_name="Nano 33", services=[svc])
Skanowanie w poszukiwaniu pobliskich rozgłaszających urządzeń w roli central:
from ubluepy import Scanner
for entry in Scanner().scan(1_000): # 1 second window
print(entry.addr(), entry.rssi(), "dBm")
Pełne API znajdziesz w dokumentacji ubluepy — UUID, Service, Characteristic, Peripheral, Scanner, ScanEntry oraz przestrzeń nazw constants.
Opis magistral¶
GPIO¶
Użyj machine.Pin, aby odczytać lub sterować dowolnym z opisanych na nadruku pinów. Wyjścia to 3.3 V CMOS — 15 mA na pin, 25 mA łącznie dla wszystkich GPIO.
from machine import Pin
out = Pin("D2", Pin.OUT)
out.on()
out.off()
out.value(1)
inp = Pin("D3", Pin.IN, Pin.PULL_UP)
print(inp.value())
Każdy pin wejściowy może również wyzwalać przerwanie przy zmianie zbocza:
def handler(pin):
print("triggered:", pin)
Pin("D3", Pin.IN, Pin.PULL_UP).irq(
handler, Pin.IRQ_FALLING | Pin.IRQ_RISING,
)
UART¶
Magistrala |
TX |
RX |
|---|---|---|
UART1 |
TX |
RX |
Użyj nazw z nadruku TX/RX z machine.UART
from machine import UART
uart = UART(1, baudrate=115200)
uart.write("hello")
uart.read(5)
I²C¶
Magistrala |
SDA |
SCL |
|---|---|---|
I2C0 |
|
|
I2C1 |
|
|
Obie magistrale wymagają jawnego przekazania swoich pinów do machine.I2C
from machine import I2C, Pin
bus0 = I2C(0, scl=Pin("I2C_SCL"), sda=Pin("I2C_SDA"), freq=400_000)
bus0.scan()
bus1 = I2C(1, scl=Pin("P15"), sda=Pin("P14"), freq=400_000)
bus1.scan()
Informacja
Magistrala 1 to wewnętrzna magistrala sensorów na P14/P15 (niedostępna na nagłówkach użytkownika) — obsługuje IMU, barometr, sensor środowiskowy i APDS9960. Wbudowane sterowniki sensorów korzystają z niej bezpośrednio; kod użytkownika również może ją przeskanować, ale adresy są już zajęte przez wbudowane sensory.
SPI¶
Magistrala |
MOSI |
MISO |
SCK |
CS |
|---|---|---|---|---|
SPI0 |
D11 |
D12 |
D13 |
D10 |
Linia CS nie jest sterowana przez urządzenie peryferyjne SPI — skonfiguruj D10 jako wyjście i przełączaj ją ręcznie wokół transferu:
from machine import SPI, Pin
spi = SPI(0, baudrate=10_000_000)
cs = Pin("D10", Pin.OUT, value=1) # CS is not driven by the SPI peripheral
cs.value(0)
spi.write(b"hello")
cs.value(1)
Informacja
D13 pełni jednocześnie funkcję pomarańczowej diody LED_BUILTIN — sterowanie SPI na tej magistrali będzie migać diodą w rytm zegara magistrali.
ADC¶
Układ nRF52840 ma osiem 12-bitowych kanałów ADC (SAADC) wyprowadzonych na A0–A7, wszystkie odnoszące się do 3.3 V — read_u16 zwraca 0–65535 w zakresie 0–3.3 V na pinie. Pin AREF płytki nie jest podłączony, więc odniesienie zawsze wynosi 3.3 V:
from machine import ADC
import time
adc = ADC("A0")
while True:
voltage = adc.read_u16() * 3.3 / 65535
print(voltage)
time.sleep_ms(100)
PWM¶
Układ nRF52840 udostępnia cztery urządzenia peryferyjne PWM (PWM0–PWM3), z których każde steruje czterema kanałami, co daje łącznie 16 sprzętowych slotów PWM. W przeciwieństwie do portów o stałej funkcji urządzenia te są kierowane przez macierz GPIOTE — każdy GPIO może być wyjściem PWM, więc nie ma stałego przyporządkowania pin-do-slotu. Kosztem tej elastyczności są dwa ograniczenia wpisane w krzem:
Wszystkie cztery kanały w obrębie jednego modułu współdzielą jeden okres/częstotliwość.
Każdy kanał ma własny współczynnik wypełnienia i polaryzację.
Koncepcyjnie 16 slotów wygląda tak:
Moduł |
Kan. 0 |
Kan. 1 |
Kan. 2 |
Kan. 3 |
|---|---|---|---|---|
PWM0 |
wypełnienie |
wypełnienie |
wypełnienie |
wypełnienie |
PWM1 |
wypełnienie |
wypełnienie |
wypełnienie |
wypełnienie |
PWM2 |
wypełnienie |
wypełnienie |
wypełnienie |
wypełnienie |
PWM3 |
wypełnienie |
wypełnienie |
wypełnienie |
wypełnienie |
Każdy wiersz działa z jedną częstotliwością; cztery komórki w wierszu sterują niezależnie wybranym pinem z własnym współczynnikiem wypełnienia. Różne wiersze mogą działać z zupełnie różnymi częstotliwościami.
Steruj dowolnym opisanym na nadruku pinem (lub wbudowanymi diodami LED) przez machine.PWM
from machine import Pin, PWM
pwm = PWM(Pin("D3"), freq=1_000, duty_u16=32768)
Ostrzeżenie
Automatyczne przydzielanie zajmuje cały moduł na jedno wywołanie. Gdy tworzysz PWM bez argumentów device=/channel=, sterownik zajmuje pierwszy wolny moduł i wiąże twój pin tylko z jego kanałem 0. Pozostałe trzy kanały tego modułu pozostają bezczynne i są dostępne tylko przez jawne device=/channel=. To ogranicza liczbę nieoznaczonych wywołań PWM(Pin(...)) do czterech, zanim sterownik zgłosi ValueError: all PWM devices in use — mimo że technicznie dwanaście slotów jest nadal wolnych.
Aby użyć więcej niż czterech PWM lub celowo współdzielić częstotliwość między pinami, przekaż device (0–3) i channel (0–3):
# Two PWMs on the same module → forced to share frequency,
# but each gets its own duty cycle.
pwm_a = PWM(Pin("D3"), device=0, channel=0,
freq=1_000, duty_u16=32768)
pwm_b = PWM(Pin("D5"), device=0, channel=1,
freq=1_000, duty_u16=16384)
# A third PWM on a separate module, free to pick any frequency.
pwm_c = PWM(Pin("D6"), device=1, channel=0,
freq=20_000, duty_u16=49152)
Współczynnik wypełnienia przyjmuje duty (0–100%), duty_u16 (0–65535) lub duty_ns. Dodaj invert=1, aby odwrócić polaryzację wyjścia (przydatne dla aktywnej stanem niskim diody RGB LED).
Informacja
Ponieważ częstotliwość jest właściwością modułu, wywołanie pwm.freq(new_freq) na dowolnym kanale modułu ponownie uruchamia nrfx_pwm_init dla całego modułu i zmienia częstotliwość widzianą przez każdy inny kanał, który go współdzieli.
Informacja
Dozwolone częstotliwości obejmują w przybliżeniu zakres od 4 Hz do 5.3 MHz, wyprowadzone z zegara bazowego 16 MHz z preskalerami 1/2/4/8/16/32/64/128 i 15-bitowym licznikiem okresu. Sterownik automatycznie wybiera najbliższy dzielnik — freq() raportuje żądaną wartość, a nie dokładną osiągalną.
Programowo emulowane magistrale (bit-banging)¶
machine.SoftI2C i machine.SoftSPI działają na dowolnym GPIO, jeśli potrzebujesz dodatkowej magistrali.
Sensor termiczny (zewnętrzny)¶
Oprogramowanie układowe zawiera sterownik fir — sterownik sensora termicznego (fir == far infrared, daleka podczerwień) dla zewnętrznie podłączonych kamer termowizyjnych:
MLX90621 — matryca IR 16 × 4
MLX90640 — matryca IR 32 × 24
MLX90641 — matryca IR 16 × 12
AMG8833 — matryca IR 8 × 8
Podłącz moduł do magistrali I²C płytki i odczytuj ramki za pomocą fir.init() + fir.snapshot()
import time
import image
import fir
fir.init() # auto‑detects the sensor
clock = time.clock()
while True:
clock.tick()
try:
img = fir.snapshot(x_scale=5, y_scale=5,
color_palette=image.PALETTE_IRONBOW,
hint=image.BICUBIC,
copy_to_fb=True)
except OSError:
continue
print(clock.fps())
Sterownik fir komunikuje się z sensorem wyłącznie przez I²C 0 — podłącz moduł do pól I2C_SCL / I2C_SDA (A5 / A4).
Pomiar czasu¶
time¶
Moduł time obejmuje blokujące opóźnienia, monotoniczne takty oraz pomiar upływającego czasu:
import time
time.sleep(1) # seconds
time.sleep_ms(500)
time.sleep_us(10)
start = time.ticks_ms()
# ...do work...
elapsed = time.ticks_diff(time.ticks_ms(), start)
Wirtualne liczniki czasu¶
machine.Timer planuje okresowe lub jednorazowe wywołania zwrotne bez zajmowania sprzętowego slotu licznika czasu. Przekaż -1 jako id, aby użyć wirtualnego (programowego) licznika czasu:
from machine import Timer
one_shot = Timer(-1)
one_shot.init(period=5_000, mode=Timer.ONE_SHOT,
callback=lambda t: print("once"))
periodic = Timer(-1)
periodic.init(period=2_000, mode=Timer.PERIODIC,
callback=lambda t: print("tick"))
Wartości okresu podawane są w milisekundach. Wywołaj deinit(), aby zatrzymać i zwolnić slot.
Zegar czasu rzeczywistego¶
machine.RTC utrzymuje czas zegarowy przez resety. RTC układu nRF52840 jest powiązany z oscylatorem na chipie i nie przetrwa całkowitego zaniku zasilania — ustawiaj czas przy każdym zimnym starcie, jeśli ma to znaczenie dla twojej aplikacji:
from machine import RTC
rtc = RTC()
rtc.datetime((2026, 4, 30, 4, 12, 0, 0, 0)) # Y, M, D, weekday, h, m, s, subsec
print(rtc.datetime())
Watchdog¶
machine.WDT resetuje płytkę, jeśli aplikacja zawiesi się. Po uruchomieniu nie można go zatrzymać ani przekonfigurować — karm go okresowo wewnątrz swojej głównej pętli:
from machine import WDT
wdt = WDT(timeout=5_000) # 5 second window
while True:
# ...do work...
wdt.feed()
Informacje o starcie i czasie wykonywania¶
Aktualizacja oprogramowania układowego¶
Nano 33 BLE Sense używa standardowego dla Arduino podwójnego naciśnięcia resetu, aby wejść do bootloadera Arduino. Naciśnij szybko dwukrotnie przycisk RESET — płytka przejdzie w tryb bootloadera, a OpenMV IDE może wgrać nowy obraz oprogramowania układowego.
Działający skrypt może na żądanie ponownie wejść do bootloadera, wywołując machine.bootloader()
import machine
machine.bootloader()
System plików i kolejność startu¶
Oprogramowanie układowe Nano 33 BLE Sense montuje przy starcie pojedynczy system plików:
Wewnętrzna pamięć flash — zawsze montowana w
/flashi używana jako katalog roboczy. Domyślnie zawieramain.pyiREADME.txt; tworzona przy pierwszym starcie.
Po zamontowaniu interpreter uruchamia następnie skrypty z /flash:
boot.pyjest wykonywany przy każdym miękkim resecie.main.pyjest wykonywany tylko przy zimnym starcie, bezpośrednio poboot.py.
Domyślny main.py dostarczany na świeżo wgranej płytce po prostu miga niebieskim kanałem diody RGB LED użytkownika jako sygnał obecności (dwa krótkie błyski, krótka przerwa), dzięki czemu można poznać, że oprogramowanie układowe wystartowało poprawnie, bez podłączonego hosta.
/flash nie jest na tej płytce udostępniany jako napęd pamięci masowej USB.
Rozmiary pamięci masowej¶
Nano 33 BLE Sense jest dostarczany z:
/flash— system plików FAT o pojemności 64 KB, do odczytu/zapisu.
Kompilacja Nano 33 BLE Sense nie zawiera ROMFS; dostarczaj moduły Python bezpośrednio na /flash.
Biblioteki programowe¶
Pełną listę modułów — w tym te unikalne dla kompilacji Nano 33 BLE Sense — znajdziesz w indeksie bibliotek.