Arduino Nano 33 BLE Sense¶
Figyelem
Ez a kártya már nem támogatott. Az Arduino Nano 33 BLE Sense utolsó OpenMV firmware-kiadása a 4.7.0. Ehhez a célplatformhoz nem jelennek meg további firmware-frissítések, hibajavítások vagy új funkciók. Az alábbi információkat a 4.7.0-s vagy korábbi verziót futtató felhasználók kedvéért őrizzük meg.
Az Arduino Nano 33 BLE Sense egy 45 × 18 mm-es, Arduino-Nano-formátumú kártya, amely a Nordic Semiconductor nRF52840 köré épül — ez egy egyetlen, 64 MHz-en futó, FPU-val ellátott ARM Cortex-M4, 256 KB belső SRAM-mal és 1 MB belső flash memóriával. A BLE a chipen belüli rádióból származik, és a kártya tartalmaz egy 9 tengelyű IMU-t, egy LPS22HB barométert, egy HTS221 / HS3003 hőmérséklet- / páratartalom-érzékelőt, egy APDS9960 környezeti fény / szín / közelség / gesztus érzékelőt, valamint egy MP34DT05 PDM mikrofont. Az OpenMV firmware mindezeket MicroPythonból vezérli.
A teljes adatlapot, fényképeket és méreteket lásd az Arduino Nano 33 BLE Rev2 termékoldalon.
Kiemelt jellemzők¶
Nordic nRF52840 Cortex-M4 FPU-val, 64 MHz-en, 256 KB belső SRAM és 1 MB belső flash memória.
Bluetooth LE 5.0 a chipen belüli rádión és a Nordic SoftDevice s140-en keresztül.
9 tengelyű IMU —
LSM9DS1a Rev 1 esetén,BMI270+BMM150a Rev 2 esetén. A beégetettimumeghajtó induláskor mindkettőt felderíti.LPS22HBbarométer,HTS221/HS3003hőmérséklet- és páratartalom-érzékelő,APDS9960környezeti fény / szín / közelség / gesztus érzékelő, valamint MP34DT05 PDM mikrofon.Micro USB csatlakozó a tápellátáshoz, a programozáshoz és egy CDC REPL-hez.
22 felhasználói I/O láb a szabványos Nano fejléceken —
TX/RX,D2–D13(digitális),A0–A7(analóg).
Lábkiosztás¶
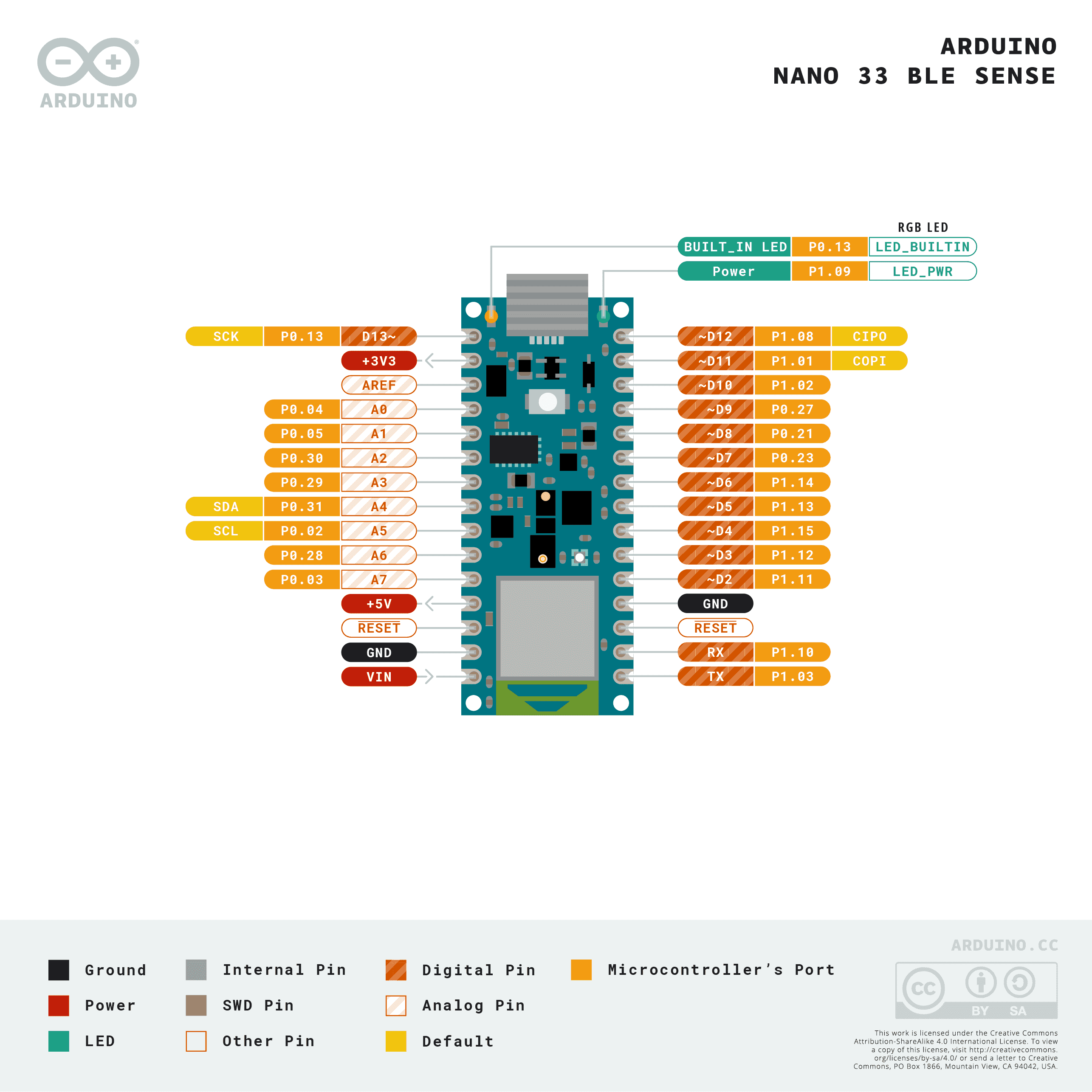
Lábkiosztási referencia¶
Láb neve |
Referencia |
Funkció |
|---|---|---|
TX |
3.3 V |
UART1 TX |
RX |
3.3 V |
UART1 RX |
D2 |
3.3 V |
PWM |
D3 |
3.3 V |
PWM |
D4 |
3.3 V |
PWM |
D5 |
3.3 V |
PWM |
D6 |
3.3 V |
PWM |
D7 |
3.3 V |
PWM |
D8 |
3.3 V |
PWM |
D9 |
3.3 V |
PWM |
D10 |
3.3 V |
PWM |
D11 |
3.3 V |
PWM / SPI0 MOSI |
D12 |
3.3 V |
PWM / SPI0 MISO |
D13 |
3.3 V |
PWM / SPI0 SCK |
A0 |
3.3 V |
ADC / PWM |
A1 |
3.3 V |
ADC / PWM |
A2 |
3.3 V |
ADC / PWM |
A3 |
3.3 V |
ADC / PWM |
A4 / I2C_SDA |
3.3 V |
ADC / PWM / I2C0 SDA |
A5 / I2C_SCL |
3.3 V |
ADC / PWM / I2C0 SCL |
A6 |
3.3 V |
ADC / PWM |
A7 |
3.3 V |
ADC / PWM |
RESET |
3.3 V |
nyomja meg a kártyán lévő RESET gombot, vagy húzza GND-re a visszaállításhoz |
LED_BUILTIN |
— |
Narancssárga felhasználói LED a |
LED_RED |
— |
RGB LED piros csatorna (aktív alacsony) |
LED_GREEN |
— |
RGB LED zöld csatorna (aktív alacsony) |
LED_BLUE |
— |
RGB LED kék csatorna (aktív alacsony) |
Figyelem
A Nano 33 BLE Sense I/O lábai csak 3.3 V-osak — nem 5 V-tűrők. Ha 5 V-ot vezet rájuk, az károsítja az nRF52840-et.
Tápellátási lábak¶
VIN — 4.5 – 21 V bemenet. A kártyát a fedélzeti feszültségszabályozón keresztül táplálja. Egy diódán keresztül az USB 5 V-os sínjéről is kap táplálást, így az USB és a
VINegyszerre is jelen lehet anélkül, hogy egymást visszatáplálnák.+5V — alapértelmezetten nincs bekötve.
+3V3 — a 3.3 V-os feszültségszabályozó kimenete.
AREF — analóg referencia láb. Ezen a kártyán nincs bekötve az nRF52840-be — az ADC mindig a 3.3 V-hoz van referálva.
GND — közös föld.
A Nano 33 BLE Sense bármelyik úton táplálható:
Micro USB — 5 V-ot biztosít a fedélzeti feszültségszabályozónak.
VIN láb — egy szabályozott 4.5 – 21 V-os tápforrás vezethető rá.
Megjegyzés
A kártya alján egy VUSB feliratú forrasztható áthidalás köti össze a +5V-ot az USB 5 V-os sínjével. Zárja le, hogy a +5V fejlécláb valóban 5 V-ot vezessen.
Megjegyzés
A fedélzeti 4.5–21 V-os kapcsolóüzemű feszültségszabályozó kimenetén egy alaphelyzetben zárt forrasztható áthidalás elvágható a szabályozó letiltásához, így a kártya közvetlenül egy külső 3.3 V-os tápforrásról is táplálható a +3V3 lábon.
Helyreállítási és hibakeresési lábak¶
RESET — egy kivezetett forrasztási felület és egy pillanatkapcsoló RESET gomb is van a kártya tetején, amelyek az nRF52840 reset vonalához kapcsolódnak. Húzza GND-re, vagy nyomja meg a gombot a visszaállításhoz.
A Nano 33 BLE Sense az Arduino szabványos dupla koppintásos visszaállítását használja az Arduino rendszerbetöltőjének eléréséhez. Nyomja meg gyorsan kétszer a RESET gombot — a kártya rendszerbetöltő módba lép, és az OpenMV IDE új firmware-képet írhat rá.
Az nRF52840 SWD jelei a kártya hátoldalán lévő bevont forrasztási felületeken vannak kivezetve. Minden hibakeresési jel 3.3 V-hoz referált.
Fedélzeti perifériák¶
LED-ek¶
A Nano 33 BLE Sense rendelkezik egy felhasználói RGB LED-del — amelyet a szitanyomott LED_RED, LED_GREEN és LED_BLUE csatornákon keresztül vezérelnek —, valamint egy különálló narancssárga LED_BUILTIN-nal a D13 lábon. Mind a négy szoftveresen vezérelhető a machine.LED segítségével:
from machine import LED
LED("LED_RED").on()
LED("LED_GREEN").on()
LED("LED_BLUE").on()
LED("LED_BUILTIN").on()
A kártyán egy különálló zöld tápellátás LED világít, amikor a +3.3 V-os sín aktív, és ez nem vezérelhető a felhasználó által.
Kamera-érzékelő¶
A Nano 33 BLE Sense OpenMV firmware-je támogatja az OmniVision OV7670 párhuzamos CMOS érzékelőt. A kártyán nincs fedélzeti képérzékelő — kösse be egy OV7670 modult az alább felsorolt szitanyomott fejléclábakhoz, és vezérelje a csi — kameraérzékelők modulon keresztül:
import csi
cam = csi.CSI()
cam.reset()
cam.pixformat(csi.RGB565)
cam.framesize(csi.QVGA)
cam.snapshot(time=2000) # let auto‑exposure settle
while True:
img = cam.snapshot()
Megjegyzés
Az OV7670 14 lábat igényel. A firmware ezeket a következőképpen köti be:
Érzékelő jele |
Nano 33 BLE Sense láb |
|---|---|
D0 |
|
D1 |
|
D2 |
|
D3 |
|
D4 |
|
D5 |
|
D6 |
|
D7 |
|
HSYNC |
|
VSYNC |
|
PXCLK |
|
MXCLK |
|
POWER |
|
RESET |
|
SCL |
|
SDA |
|
Az OV7670 I²C vezérlőbusza ugyanaz a külső I²C 0, amely az A5/A4 lábakon van kivezetve. Az érzékelő a 0x21 7 bites címen helyezkedik el — a buszon lévő felhasználói eszközöknek el kell kerülniük ezt a címet, amikor a kamera be van kötve.
IMU¶
A 9 tengelyű IMU a beégetett imu modulon keresztül érhető el, amely automatikusan felismeri, hogy a kártya az LSM9DS1-et (Rev 1) vagy a BMI270 + BMM150-et (Rev 2) tartalmazza, és egységes imu.IMU osztályt biztosít. Az érzékelők a belső I²C 1 buszon helyezkednek el (P14 / P15):
import time
from machine import I2C, Pin
from imu import IMU
bus = I2C(1, scl=Pin("P15"), sda=Pin("P14"))
sensor = IMU(bus)
while True:
print(sensor.accel()) # (x, y, z) in g
print(sensor.gyro()) # (x, y, z) in deg/s
print(sensor.magnet()) # (x, y, z) magnetometer
time.sleep_ms(100)
A koppintásérzékeléshez vagy a FIFO-hoz hasonló funkciók közvetlen eléréséhez importálja a megfelelő beégetett meghajtót (lsm9ds1, bmi270 vagy bmm150), és példányosítsa ugyanazon a buszon.
Környezeti érzékelők¶
A barométer (LPS22HB) és a hőmérséklet- / páratartalom-érzékelő (HTS221 a Rev 1 esetén, HS3003 a Rev 2 esetén) ugyanazon a belső I²C 1 buszon osztozik az IMU-val:
import time
from machine import I2C, Pin
from lps22h import LPS22H
from hts221 import HTS221
bus = I2C(1, scl=Pin("P15"), sda=Pin("P14"))
lps = LPS22H(bus)
try:
hts = HTS221(bus)
except OSError:
from hs3003 import HS3003
hts = HS3003(bus)
while True:
print("pressure: %.2f hPa" % lps.pressure())
print("temperature: %.2f C" % lps.temperature())
print("humidity: %.2f %%" % hts.humidity())
time.sleep_ms(500)
Fény / szín / közelség / gesztus¶
A Broadcom APDS9960 ugyanazon a belső I²C 1 buszon helyezkedik el, és környezeti fény, RGB szín, közelség és gesztus érzékelést biztosít:
import time
from machine import I2C, Pin
from apds9960 import uAPDS9960 as APDS9960
bus = I2C(1, scl=Pin("P15"), sda=Pin("P14"))
apds = APDS9960(bus)
apds.enableLightSensor()
while True:
print("ambient light:", apds.readAmbientLight())
time.sleep_ms(250)
Mikrofon¶
A fedélzeti MP34DT05 PDM mikrofon a audio — Audio modul segítségével rögzíthető. Minden puffer előjeles 16 bites PCM bytearray formájában érkezik, készen arra, hogy a ulab/numpy által DSP-re kerüljön:
import audio
from ulab import numpy as np
def loudness(pcmbuf):
samples = np.array(np.frombuffer(pcmbuf, dtype=np.int16), dtype=np.float)
rms = np.sqrt(np.mean(samples ** 2))
if rms > 10000:
print("Loud!", int(rms))
audio.init(channels=1, frequency=16000, gain_db=24)
audio.start_streaming(loudness)
while True:
pass
Bluetooth¶
Az nRF52840 Bluetooth LE 5.0 rádiója a Nordic SoftDevice s140-en fut, és a régi ubluepy modulon keresztül érhető el — a modern bluetooth / aioble — Aszinkron BLE API-k nincsenek engedélyezve ebben a buildben. Mind a periféria (GATT szerver, hirdetés), mind a központi (GAP megfigyelő / szkenner + csatlakozás) szerepkör elérhető.
Hirdetés perifériaként egyetlen Environmental Sensing szolgáltatással és egy értesíthető hőmérséklet-jellemzővel — az event_handler visszahívás csatlakozáskor, kapcsolatbontáskor és CCCD íráskor aktiválódik:
from ubluepy import Service, Characteristic, UUID, Peripheral, constants
from machine import LED
def event_handler(event_id, handle, data):
if event_id == constants.EVT_GAP_CONNECTED:
LED("LED_GREEN").on()
elif event_id == constants.EVT_GAP_DISCONNECTED:
LED("LED_GREEN").off()
periph.advertise(device_name="Nano 33", services=[svc])
svc = Service(UUID("181A")) # Environmental Sensing
char = Characteristic(UUID("2A6E"), # Temperature
props=Characteristic.PROP_NOTIFY | Characteristic.PROP_READ,
attrs=Characteristic.ATTR_CCCD)
svc.addCharacteristic(char)
periph = Peripheral()
periph.addService(svc)
periph.setConnectionHandler(event_handler)
periph.advertise(device_name="Nano 33", services=[svc])
Közeli hirdető eszközök keresése központi szerepkörben:
from ubluepy import Scanner
for entry in Scanner().scan(1_000): # 1 second window
print(entry.addr(), entry.rssi(), "dBm")
A teljes API-t lásd a ubluepy referenciában — UUID, Service, Characteristic, Peripheral, Scanner, ScanEntry, valamint a constants névtér.
Buszreferencia¶
GPIO¶
Használja a machine.Pin osztályt bármely szitanyomott láb olvasásához vagy vezérléséhez. A kimenetek 3.3 V-os CMOS — lábanként 15 mA, az összes GPIO-n összesen 25 mA.
from machine import Pin
out = Pin("D2", Pin.OUT)
out.on()
out.off()
out.value(1)
inp = Pin("D3", Pin.IN, Pin.PULL_UP)
print(inp.value())
Bármely bemeneti láb megszakítást is kiválthat éltranzícióknál:
def handler(pin):
print("triggered:", pin)
Pin("D3", Pin.IN, Pin.PULL_UP).irq(
handler, Pin.IRQ_FALLING | Pin.IRQ_RISING,
)
UART¶
Busz |
TX |
RX |
|---|---|---|
UART1 |
TX |
RX |
Használja a TX/RX szitanyomott neveket a machine.UART osztállyal:
from machine import UART
uart = UART(1, baudrate=115200)
uart.write("hello")
uart.read(5)
I²C¶
Busz |
SDA |
SCL |
|---|---|---|
I2C0 |
|
|
I2C1 |
|
|
Mindkét busznál a lábakat kifejezetten át kell adni a machine.I2C osztálynak:
from machine import I2C, Pin
bus0 = I2C(0, scl=Pin("I2C_SCL"), sda=Pin("I2C_SDA"), freq=400_000)
bus0.scan()
bus1 = I2C(1, scl=Pin("P15"), sda=Pin("P14"), freq=400_000)
bus1.scan()
Megjegyzés
Az 1-es busz a belső érzékelőbusz a P14/P15 lábakon (nem a felhasználói fejléceken) — ez szolgálja ki az IMU-t, a barométert, a környezeti érzékelőt és az APDS9960-at. A beégetett érzékelő-meghajtók közvetlenül használják; a felhasználói kód is szkennelheti, de a címeket már a fedélzeti érzékelők foglalják.
SPI¶
Busz |
MOSI |
MISO |
SCK |
CS |
|---|---|---|---|---|
SPI0 |
D11 |
D12 |
D13 |
D10 |
A CS vonalat nem az SPI periféria vezérli — konfigurálja a D10-et kimenetként, és kapcsolgassa manuálisan az átvitel körül:
from machine import SPI, Pin
spi = SPI(0, baudrate=10_000_000)
cs = Pin("D10", Pin.OUT, value=1) # CS is not driven by the SPI peripheral
cs.value(0)
spi.write(b"hello")
cs.value(1)
Megjegyzés
A D13 egyben a narancssárga LED_BUILTIN is — az SPI vezérlése ezen a buszon a busz órajelének ütemében villogtatja a LED-et.
ADC¶
Az nRF52840 nyolc 12 bites ADC csatornával (SAADC) rendelkezik, amelyek az A0–A7 lábakon vannak kivezetve, mind 3.3 V-hoz referált — a read_u16 0–65535 értéket ad vissza a láb 0–3.3 V tartományában. A kártya AREF lába nincs bekötve, így a referencia mindig 3.3 V:
from machine import ADC
import time
adc = ADC("A0")
while True:
voltage = adc.read_u16() * 3.3 / 65535
print(voltage)
time.sleep_ms(100)
PWM¶
Az nRF52840 négy PWM perifériát (PWM0–PWM3) tesz elérhetővé, amelyek mindegyike négy csatornát vezérel, összesen 16 hardveres PWM helyet. A rögzített funkciójú portokkal ellentétben a perifériák a GPIOTE mátrixon keresztül irányítanak — bármely GPIO lehet PWM kimenet, így nincs láb-szeletszelet hozzárendelés. E rugalmasság ára két, a szilíciumba épített megkötés:
Egy modulon belüli mind a négy csatorna egyetlen periódust/frekvenciát oszt meg.
Minden csatornának saját kitöltési tényezője és polaritása van.
Fogalmilag a 16 hely így néz ki:
Modul |
Ch 0 |
Ch 1 |
Ch 2 |
Ch 3 |
|---|---|---|---|---|
PWM0 |
kitöltés |
kitöltés |
kitöltés |
kitöltés |
PWM1 |
kitöltés |
kitöltés |
kitöltés |
kitöltés |
PWM2 |
kitöltés |
kitöltés |
kitöltés |
kitöltés |
PWM3 |
kitöltés |
kitöltés |
kitöltés |
kitöltés |
Minden sor egy frekvencián fut; egy sor négy cellája egy-egy önállóan kiválasztott lábat vezérel saját kitöltési tényezővel. A különböző sorok teljesen eltérő frekvenciákon futhatnak.
Vezéreljen bármely szitanyomott lábat (vagy a fedélzeti LED-eket) a machine.PWM segítségével:
from machine import Pin, PWM
pwm = PWM(Pin("D3"), freq=1_000, duty_u16=32768)
Figyelem
Az automatikus kiosztás híváKonként egy egész modult felemészt. Amikor device=/channel= kulcsszóargumentumok nélkül hoz létre egy PWM-et, a meghajtó megragadja az első szabad modult, és a lábat csak annak 0. csatornájához köti. A modul fennmaradó három csatornája tétlen marad, és csak kifejezett device=/channel= megadásával érhető el. Ez négyre korlátozza a segítség nélküli PWM(Pin(...)) hívásokat, mielőtt a meghajtó ValueError: all PWM devices in use hibát váltana ki — annak ellenére, hogy technikailag még tizenkét hely szabad.
Négynél több PWM használatához, vagy egy frekvencia szándékos megosztásához a lábak között, adja át a device (0–3) és channel (0–3) paramétert:
# Two PWMs on the same module → forced to share frequency,
# but each gets its own duty cycle.
pwm_a = PWM(Pin("D3"), device=0, channel=0,
freq=1_000, duty_u16=32768)
pwm_b = PWM(Pin("D5"), device=0, channel=1,
freq=1_000, duty_u16=16384)
# A third PWM on a separate module, free to pick any frequency.
pwm_c = PWM(Pin("D6"), device=1, channel=0,
freq=20_000, duty_u16=49152)
A kitöltési tényező a duty (0–100%), a duty_u16 (0–65535) vagy a duty_ns értéket fogadja el. Adjon hozzá invert=1-et a kimeneti polaritás megfordításához (hasznos az aktív alacsony RGB LED-hez).
Megjegyzés
Mivel a frekvencia modulonkénti tulajdonság, a pwm.freq(new_freq) meghívása egy modul bármelyik csatornáján újrafuttatja az nrfx_pwm_init-et az egész modulra, és megváltoztatja az ugyanazon osztozó összes többi csatorna által látott frekvenciát.
Megjegyzés
Az engedélyezett frekvenciák nagyjából 4 Hz-től 5.3 MHz-ig terjednek, a 16 MHz-es alapórajelből 1/2/4/8/16/32/64/128 előosztókkal és egy 15 bites periódusszámlálóval származtatva. A meghajtó automatikusan a legközelebbi osztót választja — a freq() a kért értéket jelenti, nem a pontosan elérhetőt.
Szoftveresen bitléptetett buszok¶
A machine.SoftI2C és a machine.SoftSPI bármely GPIO-n működik, ha egy további buszra van szüksége.
Hőérzékelő (külső)¶
A firmware tartalmazza a fir — hőérzékelő-meghajtó (fir == far infrared, távoli infravörös) meghajtót külsőleg bekötött hőkamerákhoz:
MLX90621 — 16 × 4 IR mátrix
MLX90640 — 32 × 24 IR mátrix
MLX90641 — 16 × 12 IR mátrix
AMG8833 — 8 × 8 IR mátrix
Kösse be a modult a kártya I²C buszára, és olvassa be a képkockákat a fir.init() + fir.snapshot() segítségével:
import time
import image
import fir
fir.init() # auto‑detects the sensor
clock = time.clock()
while True:
clock.tick()
try:
img = fir.snapshot(x_scale=5, y_scale=5,
color_palette=image.PALETTE_IRONBOW,
hint=image.BICUBIC,
copy_to_fb=True)
except OSError:
continue
print(clock.fps())
A fir meghajtó csak az I²C 0-n keresztül kommunikál az érzékelővel — kösse be a modult az I2C_SCL / I2C_SDA felületekhez (A5 / A4).
Időzítés¶
time¶
A time modul lefedi a blokkoló késleltetéseket, a monoton ütemjeleket és az eltelt idő mérését:
import time
time.sleep(1) # seconds
time.sleep_ms(500)
time.sleep_us(10)
start = time.ticks_ms()
# ...do work...
elapsed = time.ticks_diff(time.ticks_ms(), start)
Virtuális időzítők¶
A machine.Timer periodikus vagy egyszeri visszahívásokat ütemez anélkül, hogy hardveres időzítő helyet foglalna le. Adjon át -1-et azonosítóként egy virtuális (szoftveres) időzítő használatához:
from machine import Timer
one_shot = Timer(-1)
one_shot.init(period=5_000, mode=Timer.ONE_SHOT,
callback=lambda t: print("once"))
periodic = Timer(-1)
periodic.init(period=2_000, mode=Timer.PERIODIC,
callback=lambda t: print("tick"))
A periódusértékek ezredmásodpercben vannak. Hívja meg a deinit() metódust a leállításhoz és a hely felszabadításához.
Valós idejű óra¶
A machine.RTC a visszaállítások között megőrzi a faliórát. Az nRF52840 RTC-je a chipen lévő oszcillátorhoz kötődik, és teljes áramkimaradást nem él túl — állítsa be az időt minden hidegindításkor, ha ez fontos az alkalmazása számára:
from machine import RTC
rtc = RTC()
rtc.datetime((2026, 4, 30, 4, 12, 0, 0, 0)) # Y, M, D, weekday, h, m, s, subsec
print(rtc.datetime())
Watchdog¶
A machine.WDT visszaállítja a kártyát, ha az alkalmazás lefagy. Az indítás után nem állítható le és nem konfigurálható újra — táplálja rendszeresen a fő ciklusán belül:
from machine import WDT
wdt = WDT(timeout=5_000) # 5 second window
while True:
# ...do work...
wdt.feed()
Indítási és futásidejű információk¶
Firmware-frissítés¶
A Nano 33 BLE Sense az Arduino szabványos dupla koppintásos visszaállítását használja az Arduino rendszerbetöltőjének eléréséhez. Nyomja meg gyorsan kétszer a RESET gombot — a kártya rendszerbetöltő módba lép, és az OpenMV IDE új firmware-képet írhat rá.
Egy futó szkript igény szerint újra beléphet a rendszerbetöltőbe a machine.bootloader() meghívásával:
import machine
machine.bootloader()
Fájlrendszer és indítási sorrend¶
A Nano 33 BLE Sense firmware indításkor egyetlen fájlrendszert csatol fel:
Belső flash — mindig a
/flashalá van csatolva, és munkakönyvtárként szolgál. Alapértelmezetten amain.py-t és aREADME.txt-t tartalmazza; a legelső indításkor jön létre.
A felcsatolás után az értelmező a szkripteket a /flash-ből futtatja:
A
boot.pyminden szoftveres visszaállításkor lefut.A
main.pycsak hidegindításkor fut le, közvetlenül aboot.pyután.
A frissen flashelt kártyán szállított alapértelmezett main.py csak a felhasználói RGB LED kék csatornáját villogtatja szívverésként (két rövid impulzus, rövid szünet), így anélkül is megállapíthatja, hogy a firmware tisztán elindult, hogy bármilyen gazdagép csatlakozna.
A /flash ezen a kártyán nincs USB tömegtárolóként megjelenítve.
Tárolóméretek¶
A Nano 33 BLE Sense a következőkkel érkezik:
/flash— 64 KB FAT fájlrendszer, írható/olvasható.
A Nano 33 BLE Sense build nem tartalmaz ROMFS-t; a Python modulokat közvetlenül a /flash-en szállítsa.
Szoftverkönyvtárak¶
A modulok teljes listáját lásd a könyvtárindexben — beleértve azt is, hogy melyek egyediek a Nano 33 BLE Sense buildben.