Arduino Giga R1 WiFi¶
Az Arduino Giga R1 WiFi egy 101 × 53 mm-es, Mega-formátumú kártya, amelyet az STMicroelectronics STM32H747XI köré építettek — ez egy kétmagos SoC, amely egy 480 MHz-es Cortex‑M7 magot kombinál egy 240 MHz-es Cortex‑M4 maggal. Az OpenMV firmware teljes egészében az M7 magon fut. A Giga a szabványos Arduino Mega tüskesor-elrendezést egy 22 lábú Arducam kamera flex csatlakozóval, egy MIPI‑DSI csatlakozóval az Arduino Giga Display Shield számára, valamint egy 3,5 mm-es sztereó audio jackkel egészíti ki.
A teljes adatlapért, fényképekért és méretekért lásd az Arduino Giga R1 WiFi termékoldalt.
Kiemelt jellemzők¶
STMicroelectronics STM32H747XI kétmagos Cortex‑M7 (480 MHz) + Cortex‑M4 (240 MHz). Az OpenMV firmware csak az M7 magon fut; az M4 mag az openamp modulon keresztül érhető el a processzorok közötti kommunikációhoz.
8 MB külső SDRAM, valamint 2 MB belső flash memória és 16 MB külső QSPI flash memória.
Hardveres JPEG kódoló/dekódoló.
22 lábú, Arducam-kompatibilis kamera flex csatlakozó (
J6) — illesztőprogram-támogatás az OV5640 (5MP), OV7670, GC2145, HM01B0 és HM0360 érzékelőmodulokhoz.MIPI‑DSI kijelzőcsatlakozó (
J5) az Arduino Giga Display Shield számára (480×800 kapacitív érintőpanel), valamint egy LTDC RGB kijelzőmotor a fejlettebb hordozókártyákhoz.3,5 mm-es audio jack sztereó vonalkimenettel és mikrofonbemenettel.
Wi‑Fi b/g/n (2,4 GHz) + Bluetooth LE 5.1 a Murata 1DX (CYW4343W) modulon keresztül — a mellékelt antennához egy beépített U.FL csatlakozóval kapcsolódik.
USB‑C (full‑speed) tápellátáshoz / soros kommunikációhoz / programozáshoz.
Felhasználói I/O a Mega-stílusú tüskesorokon —
D0–D75(digitális),A0–A11(analóg),DAC0/DAC1(DAC kimenetek),CAN_RX/CAN_TX(FDCAN2), valamint a belső soron lévőSDA1/SCL1I²C pár. A kártya elülső oldalán egy különálló 6 lábú SPI1 tüskesor vezeti ki aCIPO/COPI/SCKjeleket (D89/D90/D91).JTAG / SWD a felső oldali debug tüskesoron kivezetve a fejlett hibakereséshez.
Lábkiosztás¶
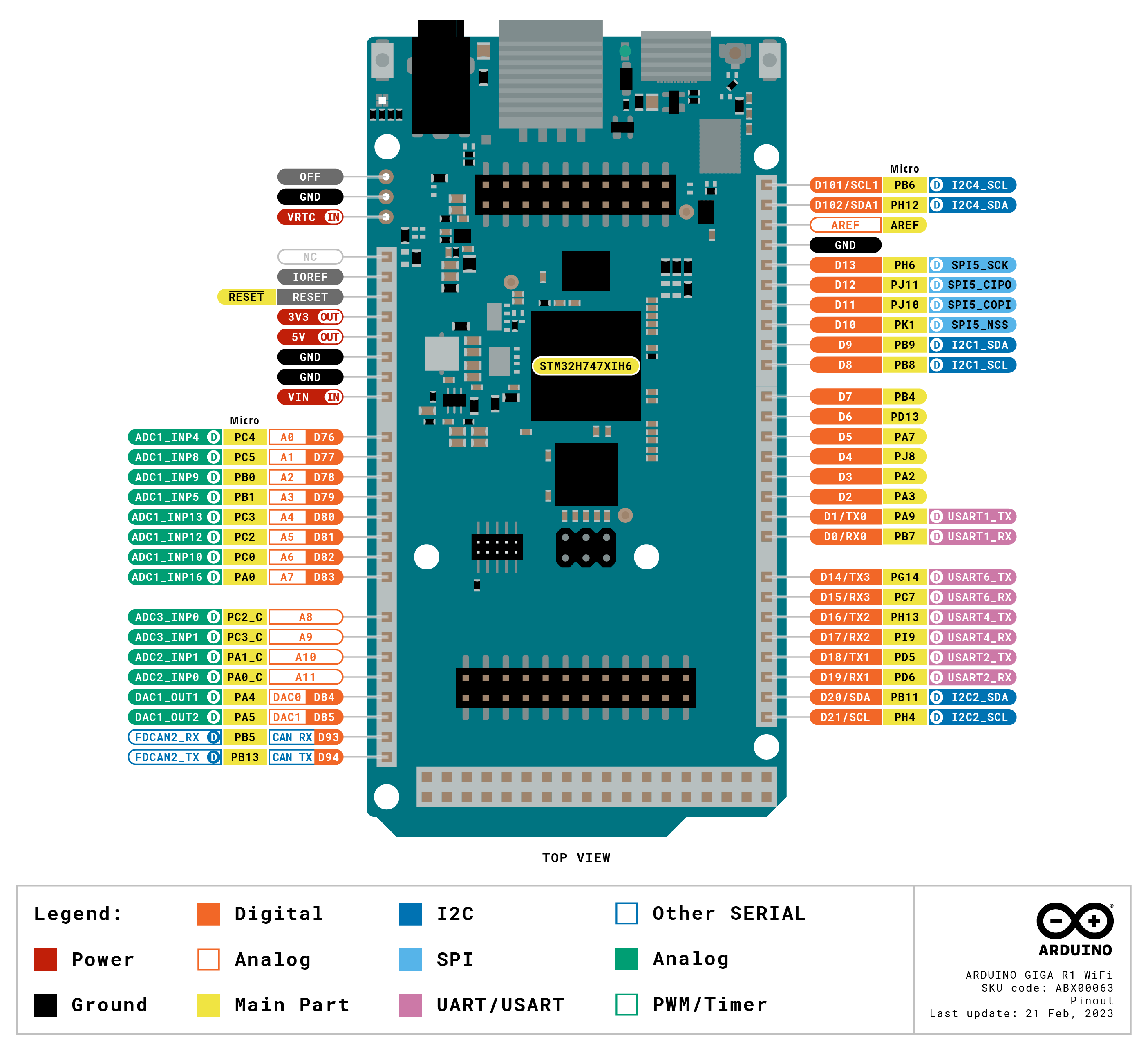
Láb referencia¶
Az Arduino Mega-stílusú tüskesorok 76 digitális lábat (D0–D75), 12 analóg lábat (A0–A11), két DAC kimenetet (DAC0/DAC1), egy másodlagos I²C párt (SDA1/SCL1) és egy FDCAN2 párt (CAN_RX/CAN_TX) tesznek elérhetővé. A kártya elülső oldalán egy különálló 6 lábú SPI1 tüskesor vezeti ki a CIPO/COPI/SCK jeleket (D89/D90/D91).
Láb neve |
Referencia |
Funkció |
|---|---|---|
D0 |
3.3 V |
USART1 RX (Serial1) / TIM4 CH2 |
D1 |
3.3 V |
USART1 TX (Serial1) / TIM1 CH2 |
D2 |
3.3 V |
TIM2 CH4 / TIM5 CH4 / USART2 RX |
D3 |
3.3 V |
TIM2 CH3 / TIM5 CH3 / USART2 TX |
D4 |
3.3 V |
TIM8 CH1 / UART8 TX |
D5 |
3.3 V |
TIM3 CH2 / SPI1 MOSI / SPI6 MOSI |
D6 |
3.3 V |
TIM4 CH2 |
D7 |
3.3 V |
TIM3 CH1 / SPI1 MISO / SPI3 MISO / SPI6 MISO |
D8 |
3.3 V |
TIM4 CH3 / I2C1 SCL / I2C4 SCL / UART4 RX |
D9 |
3.3 V |
TIM4 CH4 / I2C1 SDA / I2C4 SDA / UART4 TX |
D10 |
3.3 V |
TIM1 CH1 / TIM8 CH3N |
D11 |
3.3 V |
TIM8 CH2 / SPI5 MOSI |
D12 |
3.3 V |
TIM8 CH2N / SPI5 MISO |
D13 |
3.3 V |
TIM12 CH1 / SPI5 SCK |
D14 |
3.3 V |
USART6 TX (Serial2) / SPI6 MOSI |
D15 |
3.3 V |
USART6 RX (Serial2) / TIM3 CH2 / TIM8 CH2 |
D16 |
3.3 V |
UART4 TX (Serial3) / TIM8 CH1N |
D17 |
3.3 V |
UART4 RX (Serial3) |
D18 |
3.3 V |
USART2 TX (Serial4) |
D19 |
3.3 V |
USART2 RX (Serial4) / SPI3 MOSI |
D20 |
3.3 V |
I2C2 SDA / TIM2 CH4 / USART3 RX |
D21 |
3.3 V |
I2C2 SCL |
D22 |
3.3 V |
GPIO |
D23 |
3.3 V |
GPIO / SPI6 SCK |
D24 |
3.3 V |
GPIO / SPI6 MISO |
D25 |
3.3 V |
GPIO |
D26 |
3.3 V |
GPIO |
D27 |
3.3 V |
GPIO |
D28 |
3.3 V |
GPIO |
D29 |
3.3 V |
GPIO |
D30 |
3.3 V |
GPIO |
D31 |
3.3 V |
GPIO |
D32 |
3.3 V |
GPIO |
D33 |
3.3 V |
GPIO |
D34 |
3.3 V |
GPIO |
D35 |
3.3 V |
GPIO |
D36 |
3.3 V |
GPIO |
D37 |
3.3 V |
TIM8 CH2 |
D38 |
3.3 V |
TIM8 CH2N |
D39 |
3.3 V |
GPIO |
D40 |
3.3 V |
TIM15 CH2 / SPI4 MOSI |
D41 |
3.3 V |
GPIO |
D42 |
3.3 V |
GPIO |
D43 |
3.3 V |
GPIO |
D44 |
3.3 V |
GPIO |
D45 |
3.3 V |
GPIO |
D46 |
3.3 V |
TIM8 CH3N |
D47 |
3.3 V |
SPI3 MOSI |
D48 |
3.3 V |
TIM8 CH3 / SPI5 SCK |
D49 |
3.3 V |
GPIO |
D50 |
3.3 V |
GPIO |
D51 |
3.3 V |
TIM15 CH1 / SPI4 MISO |
D52 |
3.3 V |
GPIO |
D53 |
3.3 V |
GPIO |
D54 |
3.3 V |
TIM8 CH1 (kamera DCMI VSYNC) |
D55 |
3.3 V |
I2C3 SDA (kamera DCMI HSYNC) |
D56 |
3.3 V |
TIM3 CH1 / TIM13 CH1 (kamera DCMI PXCLK) |
D57 |
3.3 V |
TIM8 CH1N / UART8 RX (kamera fő órajel — TIM1 CH3) |
D58 |
3.3 V |
TIM8 CH3 (kamera DCMI D7) |
D59 |
3.3 V |
TIM8 CH2 (kamera DCMI D6) |
D60 |
3.3 V |
GPIO (kamera DCMI D5) |
D61 |
3.3 V |
TIM8 CH2N / UART4 RX (kamera DCMI D4) |
D62 |
3.3 V |
SPI1 SCK (kamera DCMI D3) |
D63 |
3.3 V |
TIM5 CH2 / I2C4 SCL (kijelző I²C) |
D64 |
3.3 V |
TIM5 CH1 (kamera DCMI D1) |
D65 |
3.3 V |
TIM12 CH2 (kamera DCMI D0) |
D66 |
3.3 V |
GPIO (kamera reset — lefoglalva, amikor a kamera aktív) |
D67 |
3.3 V |
GPIO (kamera power‑down — lefoglalva, amikor a kamera aktív) |
D68 |
3.3 V |
TIM3 CH1 / TIM8 CH1 / USART6 TX (Display Shield DSI RESET) |
D69 |
3.3 V |
TIM5 CH4 (Display Shield DSI TE) |
D70 |
3.3 V |
SPI2 SCK |
D71 |
3.3 V |
TIM8 CH4 / SPI2 MISO |
D72 |
3.3 V |
SPI2 MOSI |
D73 |
3.3 V |
ADC123 IN11 (Display Shield DFSDM mikrofon adat) |
D74 |
3.3 V |
GPIO (kijelző háttérvilágítás — a Giga Display Shield foglalja le) |
D75 |
3.3 V |
SPI2 SCK (Display Shield DFSDM mikrofon órajel) |
A0 / D76 |
3.3 V |
ADC12 IN4 |
A1 / D77 |
3.3 V |
ADC12 IN8 |
A2 / D78 |
3.3 V |
ADC12 IN9 / TIM3 CH3 / TIM8 CH2N |
A3 / D79 |
3.3 V |
ADC12 IN5 / TIM3 CH4 / TIM8 CH3N |
A4 / D80 |
3.3 V |
ADC12 IN13 / SPI2 MOSI |
A5 / D81 |
3.3 V |
ADC123 IN12 / SPI2 MISO |
A6 / D82 |
3.3 V |
ADC123 IN10 |
A7 / D83 |
3.3 V |
ADC1 IN16 / TIM2 CH1 / TIM5 CH1 (audio jack mikrofonbemenet) |
A8 |
3.3 V |
ADC3 IN0 (csak analóg) |
A9 |
3.3 V |
ADC3 IN1 (csak analóg) |
A10 |
3.3 V |
ADC12 IN1 (csak analóg) |
A11 |
3.3 V |
ADC12 IN0 (csak analóg) |
DAC0 / A12 / D84 |
3.3 V |
DAC1 OUT1 / ADC12 IN18 (audio jack vonalkimenet L) |
DAC1 / A13 / D85 |
3.3 V |
DAC1 OUT2 / TIM2 CH1 / SPI1 SCK / ADC12 IN19 (audio jack vonalkimenet R) |
D89 |
3.3 V |
SPI1 MISO ( |
D90 |
3.3 V |
SPI1 MOSI ( |
D91 |
3.3 V |
SPI1 SCK ( |
CAN_RX / D93 |
3.3 V |
FDCAN2 RX / TIM3 CH2 / UART5 RX |
CAN_TX / D94 |
3.3 V |
FDCAN2 TX / SPI2 SCK / UART5 TX |
SDA1 / D102 |
3.3 V |
I2C4 SDA (kijelző érintés / kamera vezérlő busz) |
SCL1 / D101 |
3.3 V |
I2C4 SCL (kijelző érintés / kamera vezérlő busz) |
RESET |
3.3 V |
nyomd meg a kártyán lévő RESET gombot vagy húzd GND-re a visszaállításhoz |
LED_RED |
3.3 V |
RGB LED piros csatorna (aktív alacsony szinten) |
LED_GREEN |
3.3 V |
RGB LED zöld csatorna (aktív alacsony szinten) |
LED_BLUE |
3.3 V |
RGB LED kék csatorna (aktív alacsony szinten) |
Megjegyzés
Az A8–A11 csak analóg kontaktusok az STM32H747 _C lábain — nincs GPIO funkciójuk, és csak az ADC-n keresztül olvashatók.
Tápláb¶
Mega tüskesor lábai:
VIN — 6–32 V bemenet. A kártyát a beépített buck szabályozón keresztül táplálja.
+5V — 5 V-os tápsín, amelyet az USB egy diódán keresztül vagy a beépített buck szabályozó táplál.
+3V3 — fő 3,3 V-os tápsín.
IOREF — a kártya I/O feszültségét tükrözi (3,3 V).
AREF — analóg feszültségreferencia az ADC lábakhoz. Alapértelmezetten 3,3 V; más referencia használatához hajtsd meg kívülről.
OFF — húzd GND-re a +3,3 V-os tápsín kikapcsolásához és a rendszer leállításához.
VRTC — 3,0 V-os gombelem-bemenet (max. 3,3 V), amely a kártya többi részének kikapcsolt állapotában is működésben tartja a chipbe épített RTC-t.
GND — közös föld.
A Giga R1 az alábbi útvonalak bármelyikén keresztül táplálható:
USB‑C — 5 V-ot biztosít a beépített buck szabályozónak.
VIN láb — hajts rá közvetlenül egy stabilizált 6–32 V-os tápforrást.
Javaslat
Használd az akkumulátor-élettartam becslőt annak modellezéséhez, hogy egy adott aktív / mélyalvási munkaciklus mellett mennyi ideig fog működni a Giga R1 akkumulátorról.
Helyreállítási és debug lábak¶
RESET — egyszerre egy kivezetett láb a tápellátás tüskesorán és egy nyomógomb a kártya tetején, amelyek a SoC NRST vonalához kapcsolódnak. A visszaállításhoz húzd GND-re vagy nyomd meg a gombot.
A Giga R1 az Arduino szabványos dupla koppintásos reset módszerét használja az Arduino rendszerbetöltőjének elindításához. Nyomd meg gyorsan kétszer a RESET gombot — a kártya újra felsorolja magát az USB-n DFU eszközként, és az OpenMV IDE új firmware-képet tölthet rá.
Ha a rendszerbetöltő teljesen hiányzik, tartsd lenyomva a BOOT0 gombot, miközben megnyomod a RESET-et, hogy a SoC-t a ROM rendszerbetöltő módba kényszerítsd.
Az STM32 SWD jelei a kártya elülső oldalán lévő 10 lábú, 1,27 mm-es Cortex Debug tüskesoron vannak kivezetve. Csatlakoztasd őket egy SEGGER J‑Link, ST‑Link vagy bármely szabványos ARM JTAG/SWD szondán keresztül. Minden debug jel 3,3 V referenciájú.
Beépített perifériák¶
LED-ek¶
A Giga R1 egyetlen felhasználói RGB LED-del rendelkezik, amely szoftveresen vezérelhető a machine.LED segítségével:
from machine import LED
LED("LED_RED").on()
LED("LED_GREEN").on()
LED("LED_BLUE").on()
A kártyán lévő külön tápellátás LED akkor világít, amikor a +3,3 V-os tápsín aktív, és nem vezérelhető a felhasználó által.
Kamera csatlakozó (J6)¶
A J6 egy 22 lábú, Arducam-kompatibilis kamera flex csatlakozó. Csatlakoztasd a támogatott érzékelőmodulok bármelyikét, és a firmware automatikusan felismeri őket a csi — kameraérzékelők modulon keresztül:
import csi
cam = csi.CSI()
cam.reset()
cam.pixformat(csi.RGB565)
cam.framesize(csi.QVGA)
cam.snapshot(time=2000) # let auto‑exposure settle
while True:
img = cam.snapshot()
Támogatott érzékelők:
OV5640 — 5 MP színes, akár QSXGA (2592 × 1944).
OV7670 — 0,3 MP színes, akár VGA (640 × 480).
GC2145 — 2 MP színes, akár UXGA (1600 × 1200).
HM01B0 — 320 × 320 monokróm.
HM0360 — VGA (640 × 480) monokróm.
Figyelem
Amíg a kamera inicializálva van, az alábbi Mega tüskesor lábakat a firmware lefoglalja, és nem használhatók:
Láb |
Indok |
|---|---|
|
DCMI adat- + szinkronjelek a kamera flex csatlakozón |
|
TIM1 CH3 — kamera fő órajel |
|
Kamera reset GPIO |
|
Kamera power‑down GPIO |
|
I²C 4 — a kamerával megosztva; a busz használható, de kerüld az érzékelő I²C címét |
Gépi tanulás¶
A ml — Gépi tanulás kvantált TFLite modelleket futtat a Cortex‑M7-en CMSIS‑NN kernelekkel — elég gyorsan ahhoz, hogy kompakt detektorokat néhány képkocka/másodperc sebességgel futtasson. A csak olvasható /rom fájlrendszeren lévő modellek közvetlenül a flash memóriából töltődnek be, RAM-ba másolás nélkül. Íme egy 128×128-as BlazeFace detektor, amely minden képkockára rávetíti az észlelt arcot és annak hat jellegzetes pontját:
import csi
import time
import ml
from ml.postprocessing.mediapipe import BlazeFace
# Initialize the sensor.
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.VGA)
csi0.window((400, 400))
# Load built-in face detection model
model = ml.Model("/rom/blazeface_front_128.tflite", postprocess=BlazeFace(threshold=0.4))
print(model)
clock = time.clock()
while True:
clock.tick()
img = csi0.snapshot()
for r, score, keypoints in model.predict([img]):
ml.utils.draw_predictions(img, [r], ("face",), ((0, 0, 255),), format=None)
ml.utils.draw_keypoints(img, keypoints, color=(255, 0, 0))
print(clock.fps(), "fps")
M4 mag¶
A Cortex‑M4 mag az openamp modulon keresztül érhető el a processzorok közötti kommunikációhoz. Az OpenMV firmware csak az M7-en fut; az M4-nek nincs saját MicroPython futtatókörnyezete, így a használata azt jelenti, hogy külön C firmware-képet kell építeni, és azt a fájlrendszerből betölteni az openamp.RemoteProc segítségével. Egy előre lefordított, virtuális UART végpontot megvalósító példa firmware elérhető az openamp_vuart tárolóban — kövesd a README-jét a vuart.elf felépítéséhez:
import openamp
import time
def ept_recv_callback(src_addr, data):
print("Received:", data.decode())
ept = openamp.Endpoint("vuart-channel", callback=ept_recv_callback)
rproc = openamp.RemoteProc("vuart.elf")
rproc.start()
count = 0
while True:
if ept.is_ready():
ept.send("Hello World %d!" % count, timeout=1000)
count += 1
time.sleep_ms(1000)
A gyakorlatban ezt a támogatást inkább az openamp interfész bemutatójaként érdemes kezelni, semmint működő kétmagos platformként — az M4 nem állítható vissza az M7-től függetlenül, így az M4 leállítása a teljes rendszer újraindítását kényszeríti ki.
Kijelző (J5)¶
A J5 egy MIPI‑DSI csatlakozó az Arduino Giga Display Shield számára — ez egy 480 × 800-as kapacitív érintőpanel, amelyet az ST7701 panel-illesztő és a GT911 érintésvezérlő köré építettek. Mindkét illesztőprogram beágyazva érkezik a firmware-rel. Használd a display — kijelzőmeghajtó modult a képkocka-pufferek megjelenítéséhez és a gt911.GT911 osztályt az érintésbemenethez.
Az alábbi példa a kamera képét egy álló tájolású 800 × 480-as kijelzőablakba tükrözi, és minden érintési kontaktust egy színes körrel vetít rá:
import csi
import time
import image
import display
from gt911 import GT911
from machine import I2C
IMG_OFFSET = 80
touch_detected = False
points_colors = ((255, 0, 0), (0, 255, 0), (0, 0, 255),
(0, 255, 255), (255, 255, 0))
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.VGA)
lcd = display.DSIDisplay(
framesize=display.FWVGA,
portrait=True,
refresh=60,
controller=display.ST7701(),
)
# Pass pin names (not Pin objects) so the driver can flip
# the reset pin's direction during start-up.
touch = GT911(
I2C(4, freq=400_000),
reset_pin="D71",
irq_pin="D70",
touch_points=5,
refresh_rate=240,
reverse_x=True,
touch_callback=lambda pin: globals().update(touch_detected=True),
)
clock = time.clock()
while True:
clock.tick()
img = csi0.snapshot()
if touch_detected:
n, points = touch.read_points()
for i in range(n):
img.draw_circle(
(points[i][0] - IMG_OFFSET,
points[i][1],
points[i][2] * 3),
color=points_colors[points[i][3]],
thickness=2,
)
touch_detected = False
lcd.write(img, y=IMG_OFFSET, hint=image.TRANSPOSE | image.VFLIP)
print(clock.fps())
Figyelem
A Giga Display Shield ugyanazt az I²C 4 buszt (SDA1/SCL1) használja, mint a kamera, a D74 lábat az LCD háttérvilágítás engedélyezéséhez, a D70/D71 lábakat a GT911 érintés IRQ és reset jelekhez, valamint a D68/D69 lábakat a DSI panel TE és RESET jeleihez.
Mikrofon (Display Shield)¶
Az Arduino Giga Display Shield egy digitális mikrofont hordoz, amely az STM32H747 DFSDM perifériájához van kötve (mikrofon órajel a D75-ön, mikrofon adat a D73-on). A mikrofon a audio — Audio modul modulon keresztül rögzíthető. Minden puffer előjeles 16 bites PCM bytearray formában érkezik, készen arra, hogy DSP-hez a ulab/numpy modulba kerüljön:
import audio
from ulab import numpy as np
def loudness(pcmbuf):
samples = np.array(np.frombuffer(pcmbuf, dtype=np.int16), dtype=np.float)
rms = np.sqrt(np.mean(samples ** 2))
if rms > 10000:
print("Loud!", int(rms))
audio.init(channels=1, frequency=16000, gain_db=24)
audio.start_streaming(loudness)
while True:
pass
IMU (Display Shield)¶
Az Arduino Giga Display Shield egy Bosch BMI270 6 tengelyes IMU-t (3D gyorsulásmérő + 3D giroszkóp) hordoz ugyanazon az I²C 4 buszon, a 0x68 címen. Az olvasásához használd a közösségi micropython_bmi270 illesztőprogramot:
import time
from machine import I2C
from micropython_bmi270 import bmi270
sensor = bmi270.BMI270(I2C(4, freq=400_000))
sensor.load_config_file()
while True:
ax, ay, az = sensor.acceleration # m/s²
gx, gy, gz = sensor.gyro
print(ax, ay, az, gx, gy, gz)
time.sleep_ms(100)
A teljes regiszter-leképezés a BMI270 adatlapban található.
RGB LED (Display Shield)¶
Az Arduino Giga Display Shield egy beépített RGB LED-et hordoz, amelyet egy ISSI IS31FL3197 3 csatornás LED-illesztő hajt meg ugyanazon az I²C 4 buszon. Az illesztő AD lába GND-re van kötve, így a 0x50 I²C címen helyezkedik el. A LED vezérléséhez használd a közösségi IS31FL3197 illesztőprogramot:
from machine import I2C
from is31fl3197 import IS31FL3197
led = IS31FL3197(I2C(4, freq=400_000))
led.set_color(255, 0, 0) # full red
A teljes regiszter-leképezés az IS31FL3197 adatlapban található.
Wi‑Fi¶
A beépített Murata 1DX (CYW4343W) a network — hálózati konfiguráció modulon keresztül érhető el állomás (station) interfészként. Csatlakoztasd a mellékelt antennát a beépített U.FL csatlakozóhoz, mielőtt elindítanád a rádiót:
import network, time
wlan = network.WLAN(network.STA_IF)
wlan.active(True)
wlan.connect("ssid", "password")
while not wlan.isconnected():
time.sleep(1)
print("Wi‑Fi IP:", wlan.ipconfig("addr4")[0])
Bluetooth¶
Ugyanaz a Murata 1DX a Bluetooth LE 5.1-et is elérhetővé teszi. Az asyncio-barát BLE-hez használd az aioble — Aszinkron BLE modult — például hirdesd magad perifériaként, és várj, amíg egy központi (central) csatlakozik:
import asyncio
import aioble
async def run():
while True:
conn = await aioble.advertise(250_000, name="Giga-R1")
print("Connected:", conn.device)
await conn.disconnected()
asyncio.run(run())
Busz referencia¶
GPIO¶
Használd a machine.Pin osztályt a feliratozott lábak bármelyikének olvasásához vagy meghajtásához. A kimenetek 3,3 V CMOS szintűek, és lábanként akár 20 mA-t nyelhetnek el/szolgáltathatnak (a teljes tüskesoron összesen 140 mA-t).
from machine import Pin
out = Pin("D2", Pin.OUT)
out.on()
out.off()
out.value(1)
inp = Pin("D3", Pin.IN, Pin.PULL_UP)
print(inp.value())
Bármely bemeneti láb megszakítást is kiválthat él-átmenetekkor:
def handler(pin):
print("triggered:", pin)
Pin("D3", Pin.IN, Pin.PULL_UP).irq(
handler, Pin.IRQ_FALLING | Pin.IRQ_RISING,
)
UART¶
Busz |
TX |
RX |
Arduino név |
|---|---|---|---|
UART1 |
D1 |
D0 |
Serial1 |
UART6 |
D14 |
D15 |
Serial2 |
UART4 |
D16 |
D17 |
Serial3 |
UART2 |
D18 |
D19 |
Serial4 |
from machine import UART
uart = UART(1, baudrate=115200)
uart.write("hello")
uart.read(5)
I²C¶
Busz |
SCL |
SDA |
|---|---|---|
I2C2 |
D21 |
D20 |
I2C1 |
D8 |
D9 |
I2C4 |
SCL1 |
SDA1 |
from machine import I2C
i2c = I2C(2, freq=400_000)
i2c.scan()
i2c.writeto(0x76, b"hi")
A 2-es busz (D20/D21, a feliratozott SCL/SDA) az alapértelmezett Arduino Wire busz. A 4-es busz (SCL1/SDA1) a kamerával és a Giga Display Shield GT911 érintésvezérlőjével van megosztva — az ezen a buszon lévő felhasználói eszközöknek kerülniük kell a következő címeket (7 bites):
0x3C— OV5640 / GC21450x24— HM01B0 / HM03600x21— OV76700x5D— GT911 érintésvezérlő (Giga Display Shield)
Ugyanaz a hardver cél (slave) módban is használható a machine.I2CTarget segítségével, hogy egy memóriaterületet tegyen elérhetővé egy másik I²C vezérlő számára:
from machine import I2CTarget
buf = bytearray(32)
target = I2CTarget(2, addr=0x42, mem=buf)
SPI¶
Busz |
MOSI |
MISO |
SCK |
|---|---|---|---|
SPI1 |
D90 |
D89 |
D91 |
SPI5 |
D11 |
D12 |
D13 |
Az SPI1 egy dedikált 6 lábú tüskesoron van kivezetve a kártya elülső oldalán. Az SPI5 a D11/D12/D13 lábakon lévő feliratozott COPI/CIPO/SCK címkéken van kivezetve.
Megjegyzés
Az elülső 6 lábú SPI1 tüskesor (J7) lábkiosztása:
Láb |
Jel |
|---|---|
1 |
|
2 |
+5V |
3 |
|
4 |
|
5 |
NRST |
6 |
GND |
from machine import SPI
from machine import Pin
spi = SPI(5, baudrate=10_000_000)
cs = Pin("D10", Pin.OUT, value=1) # CS is not driven by the SPI peripheral
cs.value(0)
spi.write(b"hello")
cs.value(1)
CAN (FDCAN)¶
Busz |
TX |
RX |
|---|---|---|
FDCAN2 |
D94 |
D93 |
from machine import CAN
can = CAN(2, 500_000)
can.set_filters(None)
can.send(0x123, b"\xDE\xAD\xBE\xEF")
print(can.recv())
ADC¶
A Giga R1 tizenkét 12 bites ADC csatornát tesz elérhetővé az A0–A11 lábakon, mindegyik 3,3 V referenciájú — a read_u16 0–65535 értéket ad vissza a láb 0–3,3 V tartományában. Az A8–A11 csak analóg _C kontaktusok, GPIO periféria nélkül:
from machine import ADC
import time
adc = ADC("A0")
while True:
voltage = adc.read_u16() * 3.3 / 65535
print(voltage)
time.sleep_ms(100)
Megjegyzés
Az A7 a 3,5 mm-es TRRS audio jack mikrofonbemenetéhez is csatlakozik — amikor egy headset van bedugva, az ADC("A7") közvetlenül az analóg mikrofonjelet olvassa.
DAC¶
Két 12 bites DAC csatorna érhető el a DAC0 és a DAC1 lábakon a pyb.DAC osztályon keresztül. Mindkettő a 3,5 mm-es TRRS audio jackhez van kötve a bal és jobb vonalkimeneti csatornaként:
from pyb import DAC
left = DAC("DAC0")
right = DAC("DAC1")
left.write(int(0.5 * 255)) # 8‑bit, ~1.65 V
right.write(int(0.5 * 255))
PWM¶
Láb |
Időzítő / csatorna |
|---|---|
D0 |
TIM4 CH2 / TIM17 CH1N |
D1 |
TIM1 CH2 |
D2 |
TIM2 CH4 / TIM5 CH4 / TIM15 CH2 |
D3 |
TIM2 CH3 / TIM5 CH3 / TIM15 CH1 |
D4 |
TIM1 CH3N / TIM8 CH1 |
D5 |
TIM1 CH1N / TIM3 CH2 / TIM8 CH1N / TIM14 CH1 |
D6 |
TIM4 CH2 |
D7 |
TIM3 CH1 |
D8 |
TIM4 CH3 / TIM16 CH1 |
D9 |
TIM4 CH4 / TIM17 CH1 |
D10 |
TIM1 CH1 / TIM8 CH3N |
D11 |
TIM1 CH2N / TIM8 CH2 |
D12 |
TIM1 CH2 / TIM8 CH2N |
D13 |
TIM12 CH1 |
D15 |
TIM3 CH2 / TIM8 CH2 |
D16 |
TIM8 CH1N |
D20 |
TIM2 CH4 |
D37 |
TIM8 CH2 |
D38 |
TIM8 CH2N |
D40 |
TIM15 CH2 |
D46 |
TIM8 CH3N |
D48 |
TIM1 CH1N / TIM8 CH3 |
D51 |
TIM15 CH1 |
D54 |
TIM8 CH1 |
D56 |
TIM3 CH1 / TIM13 CH1 |
D57 |
TIM1 CH3 / TIM8 CH1N |
D58 |
TIM8 CH3 |
D59 |
TIM8 CH2 |
D61 |
TIM8 CH2N |
D63 |
TIM5 CH2 |
D64 |
TIM5 CH1 |
D65 |
TIM12 CH2 |
D68 |
TIM3 CH1 / TIM8 CH1 |
D69 |
TIM5 CH4 |
D71 |
TIM8 CH4 |
D78 / A2 |
TIM1 CH2N / TIM3 CH3 / TIM8 CH2N |
D79 / A3 |
TIM1 CH3N / TIM3 CH4 / TIM8 CH3N |
D83 / A7 |
TIM2 CH1 / TIM5 CH1 |
D85 / A13 |
TIM2 CH1 / TIM8 CH1N |
Hajtsd meg bármelyiket a machine.PWM segítségével:
from machine import Pin, PWM
pwm = PWM(Pin("D2"), freq=1_000, duty_u16=32768)
Figyelem
A TIM1 a kamera fő órajeléhez van fenntartva, amikor a kamera a csi — kameraérzékelők modulon keresztül van inicializálva. Azok a lábak, amelyek egyetlen PWM funkciója a TIM1-en van — D1, D10, D11, D12 — nem hajthatók meg PWM-mel, amíg a kamera aktív. A többi felsorolt láb mindegyikének van TIM1-től eltérő alternatívája.
Megjegyzés
Több láb is megoszt időzítő-csatornákat:
A TIM2 CH4 a
D2és aD20lábon van.A TIM2 CH1 a
D83/A7és aD85/A13lábon van.A TIM3 CH1 a
D7, aD56és aD68lábon van.A TIM3 CH2 a
D5és aD15lábon van.A TIM4 CH2 a
D0és aD6lábon van.A TIM5 CH1 a
D64és aD83/A7lábon van.A TIM5 CH4 a
D2és aD69lábon van.A TIM8 CH1 a
D4, aD54és aD68lábon van.A TIM8 CH1N a
D5, aD16, aD57és aD85/A13lábon van.A TIM8 CH2 a
D11, aD15, aD37és aD59lábon van.A TIM8 CH2N a
D12, aD38, aD61és aD78/A2lábon van.A TIM8 CH3 a
D48és aD58lábon van.A TIM8 CH3N a
D10, aD46és aD79/A3lábon van.A TIM15 CH1 a
D3és aD51lábon van.A TIM15 CH2 a
D2és aD40lábon van.
Időzítő-csatornánként egyetlen fogyasztót válassz.
Szoftveresen bitbillegtetett buszok¶
A machine.SoftI2C és a machine.SoftSPI bármely GPIO-n működik, ha extra buszra van szükséged.
Hőérzékelő (kártyán kívüli)¶
A firmware tartalmazza a fir — hőérzékelő-meghajtó (fir == far infrared, távoli infravörös) illesztőprogramot a kívülről bekötött hőkamerákhoz:
MLX90621 — 16 × 4 IR mátrix
MLX90640 — 32 × 24 IR mátrix
MLX90641 — 16 × 12 IR mátrix
AMG8833 — 8 × 8 IR mátrix
Kösd a modult a kártya I²C buszára, és olvasd be a képkockákat a fir.init() + fir.snapshot() segítségével:
import time
import image
import fir
fir.init() # auto‑detects the sensor
clock = time.clock()
while True:
clock.tick()
try:
img = fir.snapshot(x_scale=5, y_scale=5,
color_palette=image.PALETTE_IRONBOW,
hint=image.BICUBIC,
copy_to_fb=True)
except OSError:
continue
print(clock.fps())
A fir illesztőprogram csak az I²C 1 buszon kommunikál az érzékelővel — kösd a modult a D8 (SCL) és a D9 (SDA) lábakra.
Időzítés¶
time¶
A time modul lefedi a blokkoló késleltetéseket, a monoton ütemeket és az eltelt idő mérését:
import time
time.sleep(1) # seconds
time.sleep_ms(500)
time.sleep_us(10)
start = time.ticks_ms()
# ...do work...
elapsed = time.ticks_diff(time.ticks_ms(), start)
Virtuális időzítők¶
A machine.Timer periodikus vagy egyszeri visszahívásokat ütemez anélkül, hogy egy hardveres időzítő-helyet foglalna el. Add meg a -1 értéket azonosítóként egy virtuális (szoftveres) időzítő használatához:
from machine import Timer
one_shot = Timer(-1)
one_shot.init(period=5_000, mode=Timer.ONE_SHOT,
callback=lambda t: print("once"))
periodic = Timer(-1)
periodic.init(period=2_000, mode=Timer.PERIODIC,
callback=lambda t: print("tick"))
A periódusértékek ezredmásodpercben értendők. Hívd meg a deinit() metódust a leállításhoz és a hely felszabadításához.
Valós idejű óra¶
A machine.RTC a visszaállítások között — és teljes kikapcsoláson át is, ha gombelem van a VRTC lábhoz csatlakoztatva — megőrzi a valós idejű órát:
from machine import RTC
rtc = RTC()
rtc.datetime((2026, 4, 30, 4, 12, 0, 0, 0)) # Y, M, D, weekday, h, m, s, subsec
print(rtc.datetime())
Watchdog¶
A machine.WDT visszaállítja a kártyát, ha az alkalmazás lefagy. Az elindítása után nem állítható le és nem konfigurálható újra — etesd rendszeresen a fő ciklusodon belül:
from machine import WDT
wdt = WDT(timeout=5_000) # 5 second window
while True:
# ...do work...
wdt.feed()
Indítási és futásidejű információk¶
Firmware-frissítés (DFU)¶
A Giga R1 az Arduino szabványos dupla koppintásos reset módszerét használja az Arduino rendszerbetöltőjének elindításához. Nyomd meg gyorsan kétszer a RESET gombot — a kártya újra felsorolja magát az USB-n DFU eszközként, és az OpenMV IDE új firmware-képet tölthet rá. Ha a rendszerbetöltő teljesen hiányzik, tartsd lenyomva a BOOT0 gombot, miközben megnyomod a RESET-et, hogy a SoC-t a ROM rendszerbetöltő módba kényszerítsd.
Egy futó szkript igény szerint újra beléphet a rendszerbetöltőbe a machine.bootloader() meghívásával:
import machine
machine.bootloader()
Fájlrendszer és indítási sorrend¶
A Giga R1 firmware indításkor legfeljebb két fájlrendszert csatol:
Belső flash memória — mindig a
/flashalá csatolva. Alapértelmezetten amain.pyés aREADME.txtfájlokat tartalmazza; a legelső indításkor jön létre.ROMFS — csak olvasható, memóriába leképezett fájlrendszer a
/romalatt, amelyet a MicroPython indításkor automatikusan csatol.
A csatolás után a munkakönyvtár a /flash lesz. Az értelmező ezután ebből a könyvtárból futtatja a szkripteket:
A
boot.pyminden szoftveres visszaállításkor lefut (hideg indítás,Ctrl‑Da REPL-ből, vagy valahányszor a futó szkript visszatér).A
main.pycsak hideg indításkor fut le, közvetlenül aboot.pyután. A későbbi szoftveres visszaállítások újrafuttatják aboot.py-t, de egyenesen a REPL-be lépnek — amain.pyújrafuttatásához teljesen vissza kell állítanod a kártyát.
Egy frissen flashelt kártyán szállított alapértelmezett main.py csak a felhasználói RGB LED kék csatornáját villogtatja szívverésként (két rövid impulzus, rövid szünet), így gazdagép csatlakoztatása nélkül is megállapíthatod, hogy a firmware tisztán elindult.
A sys.path kibővül, hogy mindkét fájlrendszert és azok lib/ alkönyvtárait tartalmazza, így az importálható modulok a /flash/lib vagy a /rom/lib alatt helyezkedhetnek el.
USB-n keresztül csatlakoztatva a /flash USB háttértár-meghajtóként is megjelenik a gazdagépen, lehetővé téve a boot.py, a main.py és bármely más fájl közvetlen szerkesztését. Vesd ki a meghajtót, mielőtt visszaállítanád a kártyát, hogy a gazdagép kiírja a gyorsítótárazott írásait.
Megjegyzés
Mivel az operációs rendszer a meghajtót passzív blokkeszközként kezeli, a kamerán futó kód által létrehozott vagy módosított fájlok addig nem jelennek meg, amíg a gazdagép újra nem csatolja a meghajtót. Ha az operációs rendszer és a kamera egyszerre ír ugyanarra a fájlrendszerre, az operációs rendszer nyer, és felülírja a kamera által végzett módosításokat.
Megjegyzés
A felhasználói RGB LED piros csatornája röviden felvillanhat, miközben a gazdagép az USB háttértár-meghajtóról olvas vagy arra ír — ez egy firmware által vezérelt tevékenységjelző, nem hiba.
Tárolási méretek¶
A Giga R1 a következőkkel érkezik:
/flash— 11 MB FAT fájlrendszer, írható/olvasható./rom— 4 MB csak olvasható, memóriába leképezett ROMFS, amelyet olyan szkriptek és ML modellek szállítására használnak, amelyek profitálnak a másolásmentes mmap hozzáférésből.
Hardver-hiba jelző¶
Ha a felhasználói RGB LED gyorsan végigvált az összes színen — olyan gyorsan, hogy az inkább csillogó fehér LED-nek tűnik, mint különálló árnyalatoknak —, akkor a firmware helyrehozhatatlan hardver-hibába (hard fault) ütközött. A helyreállításhoz flasheld újra a firmware-t; ha az újraflashelés nem segít, a kártya fizikailag sérült lehet.
Szoftverkönyvtárak¶
A modulok teljes listájáért — beleértve azt is, hogy melyek egyediek a Giga R1 buildhez — lásd a könyvtárindexet.