OpenMV Pure Thermal¶
Az OpenMV Pure Thermal egy teljes rendszerű hőkamerás panel, amely az STMicroelectronics STM32H743 (Cortex‑M7 @ 480 MHz) köré épül, 64 MB külső SDRAM‑mal, 32 MB QSPI flash memóriával, hardveres JPEG kodekkel, egy 4,3”-os 800×480-as IPS kapacitív érintőképernyővel, HDMI kimenettel, FLIR® Lepton® hőkamera‑foglalattal és egy 5MP-es OV5640 látható fényű kamerával. Emellett Wi‑Fi‑t, microSD‑foglalatot, lézeres távolságmérőt, hangjelzőt és nagy teljesítményű fehér megvilágítót is tartalmaz.
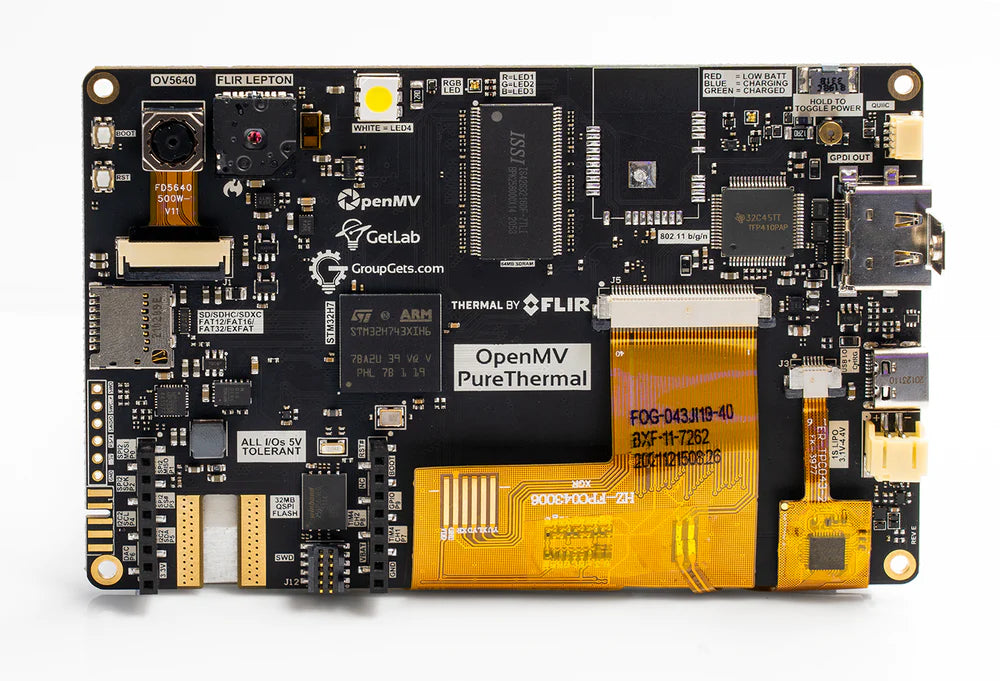
A teljes adatlapért, fényképekért és méretekért lásd az OpenMV Pure Thermal termékoldalt.
Kiemelt jellemzők¶
STMicroelectronics STM32H743XI Cortex‑M7 480 MHz-en.
Hardveres JPEG kódoló/dekódoló.
64 MB külső SDRAM (~400 MB/s) plusz 1 MB belső SRAM.
2 MB belső flash memória + 32 MB külső QSPI flash memória (~50 MB/s olvasás).
OV5640 5MP-es rolling‑shutter látható fényű érzékelő.
FLIR® Lepton® foglalat — bármilyen Lepton 1/2/2.5/3/3.5 modult fogad, radiometrikus vagy nem radiometrikus változatban, képpontonkénti hőmérséklettel Celsius-fokban.
4,3”-os 800×480-as IPS kapacitív érintőképernyő (24‑bites szín @ 60 Hz) akár 5‑pontos gesztustámogatással.
HDMI kimenet TFP410 DVI szerializálón keresztül — akár 1280×720 @ 60 Hz.
Wi‑Fi WINC1500-on keresztül; az MJPEG over RTSP alapból támogatott.
Full‑speed USB‑C (12 Mb/s, 900 mA áramkorlátozással) — a gazdagép felé VCP + USB háttértárként jelenik meg, és a töltést is kezeli.
microSD foglalat — SD akár 2 GB-ig, SDHC akár 32 GB-ig, SDXC akár 2 TB-ig.
VL53L1CX lézeres távolságmérő (akár ~4 m).
Hangjelző szoftveresen vezérelt hangerővel / frekvenciával.
Nagy teljesítményű fehér LED megvilágító a felhasználói RGB állapotjelző LED mellett.
LiPo akkumulátor-csatlakozó USB-s töltéssel 500 mA-en.
10 I/O láb, 5 V-tűrő 3,3 V kimenettel, 25 mA lábanként (összesen 120 mA), megszakításra képes. A P6 nem 5 V-tűrő, ha ADC vagy DAC módban használják.
ARM 10 lábú SWD csatlakozó ST‑LINK / J‑Link hibakereséshez.
Qwiic csatlakozó I²C perifériákhoz.
Megjegyzés
A panel bal alsó szélén egy nyílás található egy opcionális ¼”–20 állványanyához. Gyárilag nincs beszerelve — forrassz egyet a nyílásba, ha a panelt egy szabványos kamera-állványra szeretnéd rögzíteni.
Lábkiosztás¶
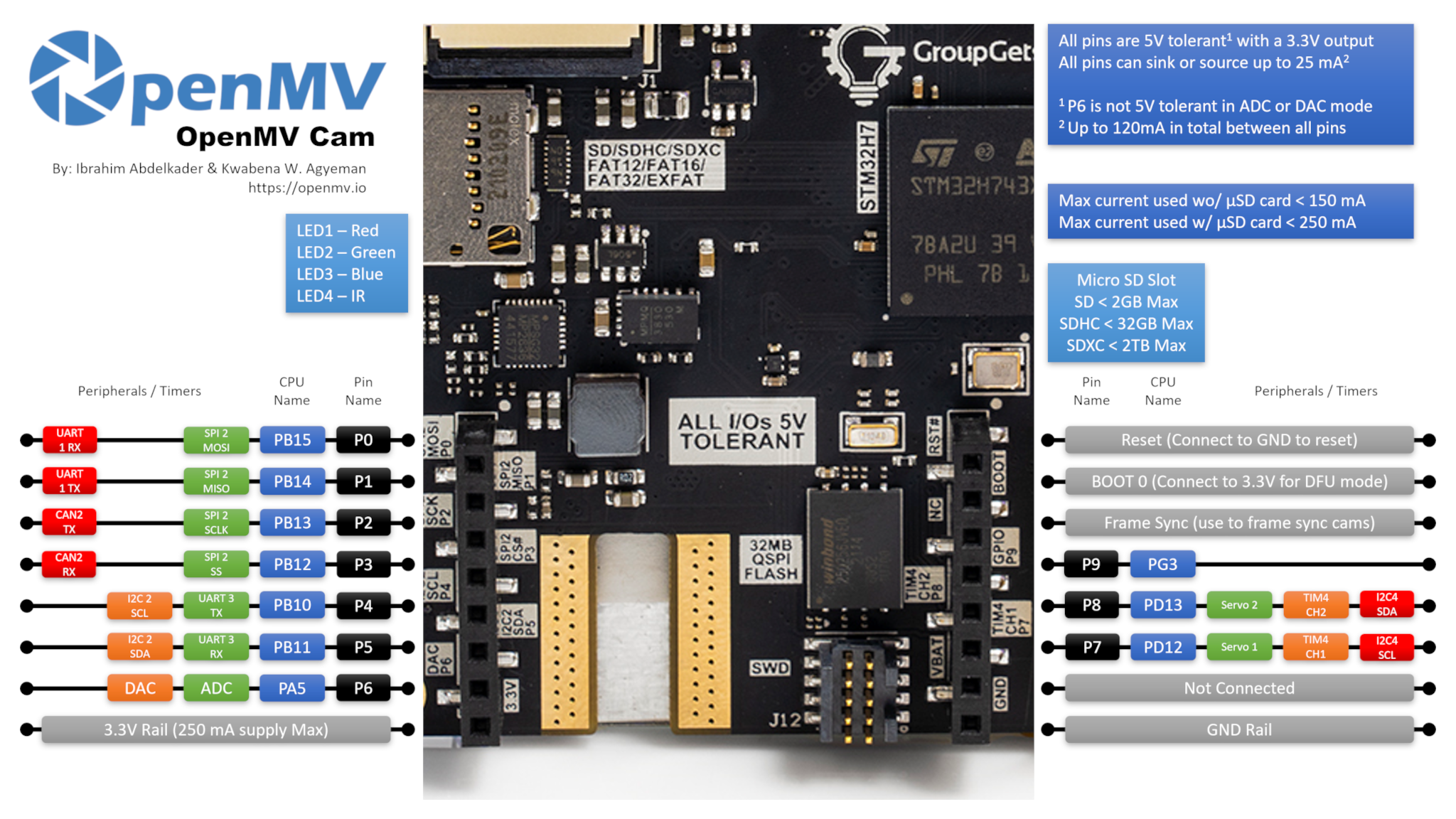
Lábkiosztási hivatkozás¶
Láb neve |
Funkció |
|---|---|
P0 |
UART1 RX / SPI2 MOSI |
P1 |
UART1 TX / SPI2 MISO |
P2 |
SPI2 SCK / FDCAN2 TX |
P3 |
SPI2 NSS (CS) / FDCAN2 RX |
P4 |
I2C2 SCL / UART3 TX / TIM2 CH3 |
P5 |
I2C2 SDA / UART3 RX / TIM2 CH4 |
P6 |
ADC / DAC / TIM2 CH1 |
P7 |
I2C4 SCL / TIM4 CH1 |
P8 |
I2C4 SDA / TIM4 CH2 |
P9 |
digitális I/O |
RESET |
húzd GND-re a panel újraindításához |
SYN |
képkocka‑szinkron pad — nincs bekötve |
VIN |
shield VIN pad — nincs bekötve |
BOOT0 |
húzd 3,3 V-ra bekapcsoláskor DFU / ROM rendszerbetöltőhöz |
BUZZER |
fedélzeti piezo hangjelző (TIM2/PWM vezérelt) |
LED_RED |
RGB állapotjelző LED piros csatorna (aktív alacsony) |
LED_GREEN |
RGB állapotjelző LED zöld csatorna (aktív alacsony) |
LED_BLUE |
RGB állapotjelző LED kék csatorna (aktív alacsony) |
LED_WHITE |
nagy teljesítményű fehér megvilágító LED |
Megjegyzés
A shielden/fejlécen lévő SYN és VIN padeknek nincs elektromos bekötésük a Pure Thermalon — csak a fejléc-kompatibilitás miatt vannak ott. Ehelyett tápláld a panelt USB‑C-n vagy a fedélzeti LiPo akkumulátor-csatlakozón keresztül (lásd a Tápláb részt lentebb). Vedd figyelembe azt is, hogy a VIN pad VBAT felirattal szerepel a panelen (címkézési hiba) — a pozíció a szabványos OpenMV‑fejléc VIN lábáé, és egyik módon sincs bekötve.
Tápláb¶
3.3V — stabilizált 3,3 V-os sín. Akár 250 mA áll rendelkezésre a shieldek számára.
GND — közös föld.
A Pure Thermalt USB‑C-n vagy a fedélzeti LiPo akkumulátor-csatlakozón keresztül táplálják. Az USB‑C port összesen 900 mA-re áramkorlátozott, és a LiPo töltését is 500 mA-en kezeli, így egy akkumulátor USB mellé csatlakoztatása is támogatott.
A fedélzeti bekapcsológomb be- és kikapcsolja a rendszer tápsínjeit, és attól függetlenül működik, hogy a panel USB-ről vagy a LiPo-ról kapja a tápot. Tartsd nyomva a gombot pár másodpercig az állapot váltásához — a gyors megnyomást figyelmen kívül hagyja, hogy megakadályozza a véletlen kikapcsolást.
A forrás kiválasztása két egyszerű szabályt követ:
Az akkumulátor csak akkor táplálja a panelt, ha feszültsége 3 V felett van. E küszöbérték alatt a fedélzeti PMIC lecsatlakoztatja az akkumulátort, hogy megvédje a túlzott lemerüléstől.
Ha USB van jelen, az USB táplálja a panelt, és bármely csatlakoztatott LiPo a háttérben töltődik.
A LiPo csatlakozó fordított feszültség elleni védelmet is tartalmaz, így az akkumulátor fordított bekötése nem károsítja a panelt.
Megjegyzés
A panel az akkumulátor feszültségét és egy akkumulátor áram-érzékelő jelet is visszavezet az MCU ADC csatornáira, de egyik firmware-támogatása sem készült még el.
Helyreállítási és hibakeresési lábak¶
RESET — húzd GND-re a panel újraindításához. A Pure Thermalon van egy dedikált RESET gomb is, amely ugyanazt csinálja.
BOOT0 — húzd 3,3 V-ra a panel táplálása közben az STM32 ROM rendszerbetöltőbe (DFU mód) való belépéshez. Az OpenMV IDE ezt a módot használja a fedélzeti rendszerbetöltő újraflashelésére. A panelen lévő dedikált BOOT0 gomb ugyanazt csinálja — tartsd nyomva a táplálás közben.
A panel egy SWD hibakereső fejlécet (RST / SWCLK / SWDIO / SWO) tesz elérhetővé a GPIO fejléc mellett, amely kompatibilis az ST‑LINK és SEGGER J‑Link adapterekkel. Egy különálló ARM 10 lábú SWD csatlakozó is fel van szerelve — ugyanazokat az SWD jeleket hordozza (nincs teljes JTAG), de a szabványos 0,05”-os 10 lábú formátumban.
Megjegyzés
Az SWO trace láb a fedélzeti FLIR® Lepton® SPI órajelével van megosztva. Az SWO nem használható a Leptonnal egyidejűleg — válaszd az egyiket vagy a másikat.
Egy harmadik PURE Modules Debug csatlakozó is fel van szerelve a panelen. Néhány hibakeresési célú jelet (SWCLK, SWDIO, RST, SPI2_MISO, SPI2_MOSI, VBUS, 3,3 V, GND és két GPIO láb) tesz elérhetővé kiegészítő modulok csatlakoztatásához. Az ezen a csatlakozón lévő két GPIO lábat egy belső bit‑bangelt I²C busz hajtja meg, nem pedig egy hardveres periféria.
Mindhárom hibakereső csatlakozó (az inline SWD fejléc, az ARM 10 lábú SWD csatlakozó és a PURE Modules Debug csatlakozó) a 3,3 V-hoz van viszonyítva — győződj meg róla, hogy a hibakereső adaptered 3,3 V-os logikára van konfigurálva, mielőtt csatlakoztatod.
Fedélzeti perifériák¶
LED-ek¶
A Pure Thermalon három LED található a panelen:
Felhasználói RGB LED — szoftveresen vezérelhető,
LED_RED,LED_GREENésLED_BLUEnéven elérhető:from machine import LED LED("LED_RED").on() LED("LED_GREEN").on() LED("LED_BLUE").on()
Fehér megvilágító — a
LED_WHITE-on keresztül meghajtva. ALED_WHITEhardveresen aktív magasként van bekötve, miközben a firmware minden más fedélzeti LED-et aktív alacsonyként kezel, ezért alow()/high()metódusokat használd aon()/off()helyett (amelyek megfordítanák a logikát):from machine import LED light = LED("LED_WHITE") light.low() # turn the white LED ON light.high() # turn the white LED OFF
Töltésjelző LED — közvetlenül a fedélzeti energiagazdálkodási hardver hajtja meg, nincs szoftveres vezérlés. Akkor is működik, ha a rendszer tápsínjei be vannak kapcsolva, és akkor is, ha ki (azaz a bekapcsológomb bármelyik állásában).
Szín
Jelentés
Kék
töltés — lásd a hibajegyzéket: lehet, hogy nem kapcsol ki a töltés befejeztével
Zöld
töltés kész — lásd a hibajegyzéket: lehet, hogy nem aktiválódik megbízhatóan
Piros
alacsony akkumulátor (≤ 3,2 V, csak amikor nem tölt aktívan)
Hangjelző¶
A fedélzeti piezo hangjelző egy időzítő-csatornához van bekötve — hajtsd meg a machine.PWM segítségével szoftveresen vezérelt frekvenciájú (hangmagasságú) és kitöltési tényezőjű (hangerejű) hangokhoz:
import time
from machine import Pin, PWM
beep = PWM(Pin("BUZZER"), freq=2_000, duty_u16=32768) # ~50% duty
time.sleep_ms(500) # sound for 0.5 s
beep.deinit()
Kamera-érzékelő¶
Az OV5640 az elsődleges CSI a Pure Thermalon — add át a cid=csi.OV5640-et az explicit címzéséhez:
import csi
cam = csi.CSI(cid=csi.OV5640)
cam.reset(hard=True)
cam.pixformat(csi.RGB565)
cam.framesize(csi.WVGA)
cam.snapshot(time=2000) # let auto‑exposure settle
while True:
img = cam.snapshot()
Az OV5640 fedélzeti JPEG tömörítővel rendelkezik. Állítsd a csi.CSI.pixformat-ot csi.JPEG-re, és az érzékelő közvetlenül a kamera-buszon keresztül szállítja a tömörített képkockákat a kamerának, ami praktikussá teszi a nagy felbontású felvételeket: a csi.HD (1280×720), a csi.FHD (1920×1080) és a teljes 5MP-es csi.WQXGA2 (2592×1944) mind JPEG-ként streamelhető. Hangold a tömörítést a csi.CSI.quality-vel (0-100, magasabb = nagyobb képkockák, több részlet):
{kind=link}
cam.pixformat(csi.JPEG)
cam.framesize(csi.WQXGA2)
cam.quality(90)
Az OV5640 hangtekercs-aktuátoros (voice-coil-actuator) autofókuszos objektívvel rendelkezik. Indíts el egy egyszeri autofókusz-menetet a csi.CSI.ioctl-on keresztül a csi.IOCTL_TRIGGER_AUTO_FOCUS-szal — az érzékelő egyszer végigfuttatja a fókuszmotort, és ráélesít arra, ami előtte van:
cam.ioctl(csi.IOCTL_TRIGGER_AUTO_FOCUS)
Add ki újra az ioctl-t, valahányszor a jelenet változik — az autofókusz egyszeri, nem folyamatos.
Megjegyzés
Az OV5640 STROBE kimenete (szinkronizált vaku / IR megvilágításhoz használt) be van kötve az MCU-ba a Pure Thermalon, de a firmware-támogatása még nem készült el.
Hőkamera-érzékelő¶
A FLIR® Lepton® foglalat egy második CSI-ként jelenik meg ugyanazon a csi — kameraérzékelők API-n keresztül. Add át a cid=csi.LEPTON-t a címzéséhez, és hagyd ki a hardveres újraindítást:
import csi
lepton = csi.CSI(cid=csi.LEPTON)
lepton.reset(hard=False)
lepton.pixformat(csi.GRAYSCALE)
lepton.framesize(csi.QVGA)
while True:
img = lepton.snapshot()
Megjegyzés
A Lepton VSYNC kimenete (egy impulzus hőkockánként) be van kötve az MCU-ba a Pure Thermalon, de a firmware-támogatása még nem készült el.
Mindkét CSI futhat egymás mellett. Az alábbi példa egy színes képkockát húz be az OV5640-ből és egy hőkockát a Leptonból, majd a Leptont a színes képkocka tetejére vetíti egy Ironbow paletta és egy alfa-maszk segítségével, amely alacsony intenzitásnál átlátszóra halványul:
import csi
import image
import math
alpha_pal = image.Image(256, 1, image.GRAYSCALE)
for i in range(256):
alpha_pal[i] = int(math.pow((i / 255), 2) * 255)
csi0 = csi.CSI()
csi0.reset(hard=True)
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.WVGA)
csi1 = csi.CSI(cid=csi.LEPTON)
csi1.reset(hard=False)
csi1.pixformat(csi.GRAYSCALE)
csi1.framesize(csi.QVGA)
img1 = image.Image(csi1.width(), csi1.height(), csi1.pixformat())
while True:
img0 = csi0.snapshot()
csi1.snapshot(blocking=False, image=img1)
img0.draw_image(
img1, 0, 0,
color_palette=image.PALETTE_IRONBOW,
alpha_palette=alpha_pal,
hint=image.BILINEAR,
)
Gépi tanulás¶
A ml — Gépi tanulás kvantált TFLite modelleket futtat a Cortex‑M7-en CMSIS‑NN kernelekkel — elég gyorsan ahhoz, hogy kompakt detektorokat néhány képkocka/másodperc sebességgel működtessen. A csak olvasható /rom fájlrendszeren lévő modellek közvetlenül a flash memóriából töltődnek be, RAM-ba másolás nélkül. Íme egy 128×128-as BlazeFace detektor, amely az észlelt arcot és hat tereppontját vetíti rá a látható fényű kamera minden képkockájára:
import csi
import time
import ml
from ml.postprocessing.mediapipe import BlazeFace
# Initialize the sensor.
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.VGA)
csi0.window((400, 400))
# Load built-in face detection model
model = ml.Model("/rom/blazeface_front_128.tflite", postprocess=BlazeFace(threshold=0.4))
print(model)
clock = time.clock()
while True:
clock.tick()
img = csi0.snapshot()
# faces is a list of ((x, y, w, h), score, keypoints) tuples
for r, score, keypoints in model.predict([img]):
ml.utils.draw_predictions(img, [r], ("face",), ((0, 0, 255),), format=None)
# keypoints is a ndarray of shape (6, 2)
# 0 - right eye (x, y)
# 1 - left eye (x, y)
# 2 - nose (x, y)
# 3 - mouth (x, y)
# 4 - right ear (x, y)
# 5 - left ear (x, y)
ml.utils.draw_keypoints(img, keypoints, color=(255, 0, 0))
print(clock.fps(), "fps")
Lézeres távolságmérő¶
A fedélzeti ST VL53L1CX time‑of‑flight távolságmérő az I²C 2-es buszra van bekötve. Használd a befagyasztott vl53l1x — VL53L1X ToF távolságérzékelő illesztőprogram illesztőprogramot akár ~4 m-ig terjedő távolságmérésekhez:
import time
from machine import I2C
import vl53l1x
bus = I2C(2)
tof = vl53l1x.VL53L1X(bus)
while True:
print("Distance:", tof.read(), "mm")
time.sleep_ms(100)
LCD kimenet¶
A 4,3”-os fedélzeti LCD 800 × 480 (WVGA) felbontású, és a display — kijelzőmeghajtó modul RGB kijelző interfészén keresztül van meghajtva — add át a framesize=display.FWVGA-t a natív felbontásához igazodva:
import display
lcd = display.RGBDisplay(framesize=display.FWVGA, refresh=60)
lcd.backlight(True) # turn the LCD backlight on
lcd.write(img)
A háttérvilágítás egy GPIO-hoz van bekötve, így a backlight() elfogad True / False értéket (vagy bármilyen 0–100 közötti értéket, ahol a 0 a kikapcsolt, és bármilyen nemnulla a bekapcsolt állapot):
lcd.backlight(False) # turn the backlight off
lcd.backlight(True) # back on
Érintőképernyő¶
A kapacitív érintésvezérlő az FT5X06; a multitouch pozíciók és gesztusesemények a ft5x06 — Érintőképernyő-meghajtó-on keresztül érhetők el. Regisztrálj egy visszahívást az érintésekre való reagáláshoz, és olvasd ki benne az aktív pontokat:
import ft5x06
touch = ft5x06.FT5X06()
def on_touch(n):
for i in range(n):
x = touch.get_point_x(i)
y = touch.get_point_y(i)
print("touch", i, "at", x, y)
gesture = touch.get_gesture()
if gesture != ft5x06.GESTURE_NONE:
print("gesture:", gesture)
touch.touch_callback(on_touch)
HDMI kimenet¶
A firmware az LCD képkocka-pufferét a fedélzeti tfp410 — DVI/HDMI vezérlő HDMI szerializálóra is kivezeti, így egy külső monitor tükrözi azt, ami az LCD-n van. Példányosítsd a tfp410.TFP410-et a HDMI kimenet engedélyezéséhez:
import tfp410
hdmi = tfp410.TFP410()
Ha csak HDMI kimenetet szeretnél, és nem érdekel a fedélzeti LCD, kapcsold ki a háttérvilágítást, és emeld a képkocka-puffer felbontását WVGA fölé. A TFP410 akár 1280×720 @ 60 Hz-et támogat, így például:
lcd = display.RGBDisplay(framesize=display.HD, refresh=60)
lcd.backlight(False) # the on‑board LCD can't render HD
hdmi = tfp410.TFP410()
A fedélzeti panel 800×480-on rögzített, így bármi WVGA fölött csak a külső HDMI monitoron értelmes.
Ahhoz, hogy megtudd, mikor csatlakoztattak vagy húztak ki egy HDMI monitort, regisztrálj egy hot‑plug visszahívást a TFP410-en. A visszahívás True értékkel sül el csatlakozáskor és False értékkel lecsatlakozáskor:
def on_hotplug(connected):
print("HDMI", "connected" if connected else "disconnected")
hdmi.hotplug_callback(on_hotplug)
A csatlakozási állapotot bármikor le is kérdezheted a isconnected() segítségével (csak akkor, ha nincs visszahívás regisztrálva).
A HDMI port a DDC (display data) és CEC (consumer electronics control) csatornákat is hordozza, amelyek a class DisplayData – kijelzőadatok osztályon keresztül érhetők el. Használd a csatlakoztatott monitor EDID blokkjának kiolvasására (hogy igazodni tudj a natív felbontásához / frissítési frekvenciájához), vagy CEC képkockák küldésére/fogadására, hogy más, ugyanazon a vezetéken lévő HDMI eszközöket vezérelj:
from display import DisplayData
dd = DisplayData(cec=True, ddc=True)
edid = dd.display_id() # EDID bytes from the monitor
print(len(edid), "byte EDID")
# Send a CEC "image view on" command (opcode 0x04) from address 1 to address 0
dd.send_frame(0, 1, b"\x04")
# ...or wait for an incoming CEC frame addressed to us (logical address 1)
src, data = dd.receive_frame(1, timeout=5_000)
print("CEC from", src, ":", data)
Wi‑Fi¶
A Wi‑Fi egy Microchip WINC1500 modulon fut, amely a class WINC – WiFi shield illesztőprogram interfészen keresztül érhető el:
import network, time
wlan = network.WINC()
wlan.connect("ssid", "password")
while not wlan.isconnected():
time.sleep(1)
print("Wi‑Fi IP:", wlan.ipconfig("addr4")[0])
Megjegyzés
Alkatrészhiány miatt néhány Pure Thermal egységet a WINC1500 modul beszerelése nélkül szállítottak. Ha a network.WINC hibát ad, vagy soha nem csatlakozik, ellenőrizd a panelen a hiányzó Wi‑Fi modult — a kamera többi része nélküle is pontosan ugyanúgy működik.
microSD kártya¶
Amikor egy kártyát behelyeznek, automatikusan a /sdcard alá csatolódik, és a megszokott fájlrendszeren keresztül használható:
import os
for entry in os.listdir("/sdcard"):
print(entry)
Busz-hivatkozás¶
GPIO¶
Használd a machine.Pin-t bármely feliratozott láb olvasásához vagy meghajtásához. A kimenetek 3,3 V-os CMOS-ok, a bemeneti oldalon 5 V-tűrők, és lábanként akár 25 mA-t tudnak nyelni/szolgáltatni (összesen 120 mA-t a teljes fejlécen).
from machine import Pin
out = Pin("P0", Pin.OUT)
out.on()
out.off()
out.value(1)
inp = Pin("P1", Pin.IN, Pin.PULL_UP)
print(inp.value())
Bármely bemeneti láb megszakítást is kiválthat él-átmeneteknél:
def handler(pin):
print("triggered:", pin)
Pin("P1", Pin.IN, Pin.PULL_UP).irq(
handler, Pin.IRQ_FALLING | Pin.IRQ_RISING,
)
UART¶
Busz |
TX |
RX |
|---|---|---|
UART1 |
P1 |
P0 |
UART3 |
P4 |
P5 |
from machine import UART
uart = UART(3, baudrate=115200)
uart.write("hello")
uart.read(5)
I²C¶
Busz |
SCL |
SDA |
|---|---|---|
I2C2 |
P4 |
P5 |
I2C4 |
P7 |
P8 |
from machine import I2C
i2c = I2C(2, freq=400_000)
i2c.scan()
i2c.writeto(0x76, b"hi")
Ugyanez a hardver cél (slave) módban is használható a machine.I2CTarget-en keresztül, hogy egy memóriaterületet tegyen elérhetővé egy másik I²C vezérlő számára:
from machine import I2CTarget
buf = bytearray(32)
target = I2CTarget(2, addr=0x42, mem=buf)
A fedélzeti Qwiic csatlakozó az egyik ilyen I²C buszt vezeti ki plug‑and‑play modulok számára. A Qwiic vonal nyitott nyelőjű (open‑drain) tranzisztorokon keresztül 5 V-ra van szintelt, így a busz csak standard módra (100 kHz) és fast módra (400 kHz) korlátozott — ne próbálj fast‑mode‑plus vagy magasabb sebességeket átküldeni a Qwiic fejlécen.
A Qwiic csatlakozó 5 V-ot ad ki a csatlakoztatott modulok táplálásához; nem használható magának a Pure Thermalnak a táplálására — ehelyett tápláld a panelt USB‑C-n vagy a LiPo akkumulátor-csatlakozón keresztül.
SPI¶
Busz |
MOSI |
MISO |
SCK |
CS |
|---|---|---|---|---|
SPI2 |
P0 |
P1 |
P2 |
P3 |
from machine import SPI
from machine import Pin
spi = SPI(2, baudrate=10_000_000)
cs = Pin("P3", Pin.OUT, value=1) # CS is not driven by the SPI peripheral
cs.value(0)
spi.write(b"hello")
cs.value(1)
CAN (FDCAN)¶
Busz |
TX |
RX |
|---|---|---|
FDCAN2 |
P2 |
P3 |
from machine import CAN
can = CAN(2, 500_000)
can.set_filters(None)
can.send(0x123, b"\xDE\xAD\xBE\xEF")
print(can.recv())
ADC és DAC¶
A P6 az egyetlen felhasználói analóg láb. Használható akár 12‑bites ADC bemenetként, akár DAC kimenetként.
ADC — teljes skála 3,3 V-on a lábon:
from machine import ADC import time adc = ADC("P6") while True: voltage = adc.read_u16() * 3.3 / 65535 print(voltage) time.sleep_ms(100)
DAC — a
pyb.DAC-en keresztül. A 8‑bites érték 0–3,3 V-ot fed le:from pyb import DAC dac = DAC("P6") voltage = 1.65 dac.write(int(voltage / 3.3 * 255))
ADC vagy DAC módban a P6 csak 3,3 V-tűrő — ne adj rá 5 V-ot.
PWM¶
Láb |
Időzítő / csatorna |
|---|---|
P4 |
TIM2 CH3 |
P5 |
TIM2 CH4 |
P6 |
TIM2 CH1 |
P7 |
TIM4 CH1 |
P8 |
TIM4 CH2 |
Megjegyzés
A TIM1 fenntartott a firmware számára a kamera-érzékelő képpont-órajelének előállításához, így a P0/P1/P2-n fizikailag jelen lévő TIM1 csatornák nem használhatók felhasználói PWM-hez a kamera megtörése nélkül.
A TIM4 meg van osztva a pyb.Servo-val — egy szervó példányosítása az egész időzítőt 50 Hz-es működésre konfigurálja át, ezért ne keverd a machine.PWM-et a P7/P8-on a pyb.Servo-val ugyanabban a szkriptben.
Hajtsd meg bármelyiküket a machine.PWM-en keresztül:
from machine import Pin, PWM
pwm = PWM(Pin("P7"), freq=1_000, duty_u16=32768)
Szoftveres bit‑bangelt buszok¶
A machine.SoftI2C és a machine.SoftSPI bármely GPIO-n működik, ha extra buszra van szükséged.
Hőérzékelő (panelen kívüli)¶
A fedélzeti FLIR Lepton mellett a firmware tartalmazza a fir — hőérzékelő-meghajtó (fir == far infrared, távoli infravörös) illesztőprogramot is külsőleg bekötött I²C hőkamerákhoz:
MLX90621 — 16 × 4 IR mátrix
MLX90640 — 32 × 24 IR mátrix
MLX90641 — 16 × 12 IR mátrix
AMG8833 — 8 × 8 IR mátrix
Kösd be a modult a panel I²C buszára, és olvass be képkockákat a fir.init() + fir.snapshot() segítségével:
import time
import image
import fir
fir.init() # auto‑detects the sensor
clock = time.clock()
while True:
clock.tick()
try:
img = fir.snapshot(x_scale=5, y_scale=5,
color_palette=image.PALETTE_IRONBOW,
hint=image.BICUBIC,
copy_to_fb=True)
except OSError:
continue
print(clock.fps())
A fir illesztőprogram csak I²C 2-n kommunikál az érzékelővel — kösd be a modult a P4 (SCL) és P5 (SDA) lábakra.
Időzítés¶
time¶
import time
time.sleep(1)
time.sleep_ms(500)
time.sleep_us(10)
start = time.ticks_ms()
elapsed = time.ticks_diff(time.ticks_ms(), start)
Virtuális időzítők¶
from machine import Timer
one_shot = Timer(-1)
one_shot.init(period=5_000, mode=Timer.ONE_SHOT,
callback=lambda t: print("once"))
periodic = Timer(-1)
periodic.init(period=2_000, mode=Timer.PERIODIC,
callback=lambda t: print("tick"))
A periódusértékek milliszekundumban vannak megadva. Hívd meg a deinit()-et a leállításhoz és a slot felszabadításához.
Valós idejű óra¶
from machine import RTC
rtc = RTC()
rtc.datetime((2026, 4, 30, 4, 12, 0, 0, 0))
print(rtc.datetime())
Ha egy LiPo akkumulátor van csatlakoztatva, az RTC akkor is tartja az időt, amikor a rendszer tápsínjei ki vannak kapcsolva (a fedélzeti bekapcsológombbal lekapcsolva). Ha csak USB van bedugva, a bekapcsológomb megnyomása az RTC tápellátását is megszakítja — így a falióra szerinti idő nem éli túl a tápkapcsolást csatlakoztatott akkumulátor nélkül.
Watchdog¶
from machine import WDT
wdt = WDT(timeout=5_000)
while True:
# ...do work...
wdt.feed()
Indítási és futásidejű információk¶
USB rendszerbetöltő ablak¶
Minden bekapcsoláskor a kamera lefuttat egy rövid rendszerbetöltőt (néhány másodperc), amely lehetővé teszi, hogy az OpenMV IDE frissítse a firmware-t anélkül, hogy a felhasználónak DFU módba kellene lépnie. Az ablak lejárta után a rendszerbetöltő átadja a vezérlést a boot.py-nak, majd a main.py-nak.
Egy futó szkript kérésre újra beléphet a rendszerbetöltőbe a machine.bootloader() meghívásával.
Fájlrendszer és indítási sorrend¶
A Pure Thermal firmware indításkor akár három fájlrendszert csatol fel:
Belső flash memória — mindig a
/flash-en van csatolva. Alapból amain.py-t és aREADME.txt-t tartalmazza; a legelső indításkor jön létre.microSD kártya — ha egy kártya van behelyezve, az a
/sdcard-on csatolódik.ROMFS — csak olvasható, memóriába leképezett fájlrendszer a
/rom-on, amely nagy adat-eszközök (pl. AI modellek) szállítására szolgál, amelyek profitálnak a másolás nélküli hozzáférésből. A MicroPython automatikusan felcsatolja indításkor, mielőtt bármilyen felhasználói Python lefutna.
A felcsatolás után a munkakönyvtár a /sdcard-ra állítódik, ha a kártya jelen van, egyébként a /flash-re. Az értelmező ezután abból a könyvtárból futtatja a szkripteket:
A
boot.pyminden szoft újraindításkor lefut.A
main.pycsak hidegindításkor fut le, közvetlenül aboot.pyután.
Egy boot.py vagy main.py SD kártyára helyezése felülírja a flash memóriában lévő példányt anélkül, hogy hozzányúlna.
USB-n keresztül csatlakoztatva az indítási fájlrendszer (a /sdcard, ha kártya van jelen, egyébként a /flash) USB háttértár-meghajtóként is megjelenik a gazdagépen. Vesd ki a meghajtót, mielőtt újraindítod a kamerát, hogy a gazdagép kiürítse a gyorsítótárazott írásait.
Megjegyzés
Az OpenMV Cam-en futó kód által létrehozott vagy módosított fájlok nem jelennek meg a gazdagépen, amíg a meghajtót újra fel nem csatolják. Használd az SD kártyát bármilyen adathoz, amelyet a szkript visszaír, és csatold fel újra, mielőtt ezeket a fájlokat a gazdagépről olvasnád.
Tárhelyméretek¶
A Pure Thermal a következőkkel érkezik:
/flash— 24 MB FAT fájlrendszer, olvasható/írható./rom— 8 MB csak olvasható, memóriába leképezett ROMFS, amely olyan szkriptek és ML modellek szállítására szolgál, amelyek profitálnak a másolás nélküli mmap hozzáférésből./sdcard— a behelyezett microSD kártya teljes mérete (amikor jelen van), olvasható/írható.
Hard‑fault jelző¶
Ha a felhasználói RGB LED gyorsan végigciklusozik az összes színen — elég gyorsan ahhoz, hogy inkább egy villódzó fehér LED-nek tűnjön, semmint különálló árnyalatoknak —, akkor a firmware egy helyrehozhatatlan hard fault-ba ütközött. A helyreállításhoz flasheld újra a firmware-t.
Hardveres hibajegyzék¶
Néhány panel-szintű furcsaságot a Pure Thermal hardveres hibajegyzék dokumentál. Fontos tudnivalók:
Akkumulátor-csatlakozó interferencia — a PCB-n lévő alkatrészek közvetlenül a LiPo akkumulátor-csatlakozó alatt helyezkednek el, és az akkumulátor-kábel dugóján kiálló ék beleakadhat ezekbe, amikor a kábelt eltávolítják, néha lerántva alkatrészeket a panelről. Vágd le az éket a kábel dugójáról oldalcsípő fogóval az első használat előtt.
Az RTC leáll, amíg a panel ki van kapcsolva — a 32 kHz-es kvarcon (Y2) lévő terhelő kapacitás túl nagy. A C96 és C97 (a kvarcot körülvevő pár az STM32 mellett) eltávolítása lehetővé teszi, hogy az RTC tartalék tápellátáson tovább működjön. A legtöbb panelt már eltávolított kondenzátorokkal szállítják; ha az RTC elveszíti az időt, amikor kihúzzák, ellenőrizd ezeket a pozíciókat. A teljes szálhoz lásd a #1536 és #1600 GitHub hibajegyeket.
A töltésjelző LED kék marad — a töltő bárhol befejezheti a töltési ciklust 4,15 V és 4,19 V között anélkül, hogy a jelzőt kékről (töltés) zöldre (feltöltve) váltaná. Az akkumulátor ilyen esetben is teljesen fel van töltve; bízz egy feszültségmérésben, ne a LED-ben.
A felirat VIN-t VBAT-ként címkézi tévesen — a szabványos OpenMV‑fejléc VIN pozíciójában lévő pad
VBATfelirattal szerepel a Pure Thermalon. A címke hibás, de a gyakorlatban nem számít, mert a padnek egyik módon sincs elektromos bekötése.
Szoftverkönyvtárak¶
A modulok teljes listájáért lásd a könyvtár-indexet — beleértve azt is, hogy melyek egyediek a Pure Thermal buildhez.