Arduino Portenta H7¶
Az Arduino Portenta H7 egy 66 × 25 mm-es ipari fejlesztőpanel, amely az STMicroelectronics STM32H747XI köré épül — ez egy kétmagos SoC, amely egy 400 MHz-es Cortex‑M7-et egyesít egy 200 MHz-es Cortex‑M4-gyel. Az OpenMV firmware teljes egészében az M7 magon fut, és úgy tervezték, hogy a Portenta Vision Shield (Ethernet vagy LoRa kiadás) kiegészítővel használják, amely egy Himax HM01B0 / HM0360 kamerát, két PDM mikrofont és egy microSD kártyahelyet ad az alap Portenta H7-hez.
A teljes adatlapért, fényképekért és méretekért lásd az Arduino Portenta H7 termékoldalt.
Kiemelt jellemzők¶
STMicroelectronics STM32H747XI kétmagos Cortex‑M7 (400 MHz) + Cortex‑M4 (200 MHz). Az OpenMV firmware csak az M7 magon fut; az M4 mag a openamp modulon keresztül érhető el a processzorok közötti kommunikációhoz.
8 MB külső SDRAM valamint 2 MB belső flash memória és 16 MB külső QSPI flash memória.
Hardveres JPEG kódoló/dekódoló.
Wi‑Fi b/g/n (2,4 GHz) + Bluetooth LE 5.1 a Murata 1DX (CYW4343W) modulon keresztül — a mellékelt antennához egy panelre szerelt U.FL csatlakozón keresztül csatlakozik.
Nagy sebességű USB‑C (480 Mb/s).
22 felhasználói I/O láb az Arduino MKR-stílusú felső tűsorokon — D0–D14 (digitális) plusz A0–A6 (analóg).
Két 80 lábú, nagy sűrűségű csatlakozó az alján kivezeti a teljes STM32H747 felépítményt — DCMI, DSI, Ethernet RMII, FDCAN, SDIO, SAI/I²S, UART-ok, további SPI/I²C/időzítők és így tovább. Az olyan kiegészítők, mint a Vision Shield, ezekhez a csatlakozókhoz illeszkednek.
JTAG / SWD az alsó HD csatlakozókon kivezetve a haladó hibakereséshez.
Akkumulátortámogatás — 3,7 V-os Li‑Po JST csatlakozó valamint panelre szerelt töltő és akkumulátormonitor.
Lábkiosztás¶
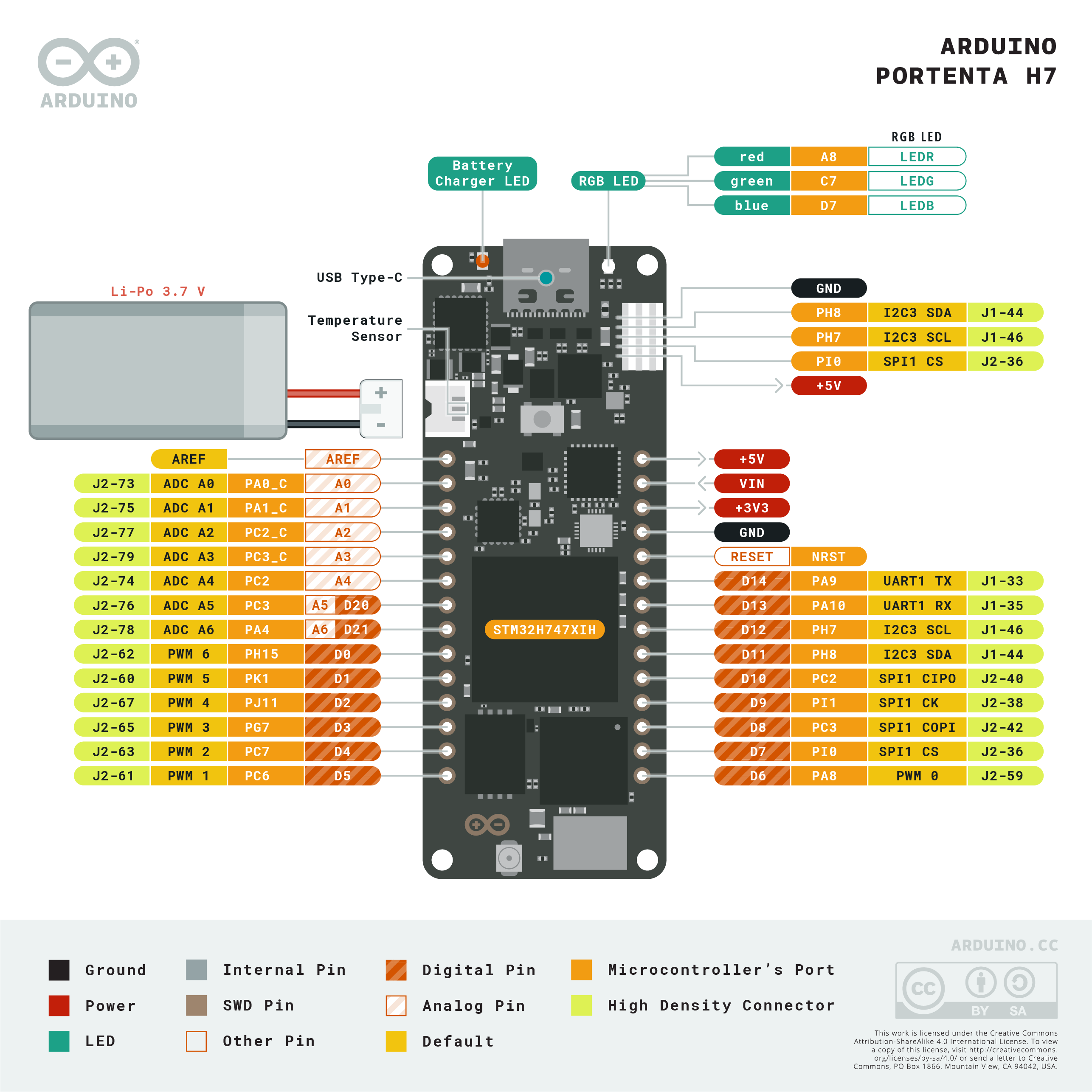
Lábkiosztási referencia¶
22 felhasználói láb van kivezetve az Arduino MKR-stílusú felső peremtűsorokon — 15 digitális (D0-D14) plusz 7 analóg (A0-A6). Sokkal több SoC láb érhető el az alsó 80 lábú, nagy sűrűségű csatlakozókon keresztül a kiegészítőkhöz; ehhez a leképezéshez lásd az Arduino teljes lábkiosztási PDF-jét.
Láb neve |
Referencia |
Funkció |
|---|---|---|
D0 |
3.3 V |
TIM8 CH3N |
D1 |
3.3 V |
TIM1 CH1 / SPI5 NSS |
D2 |
3.3 V |
TIM1 CH2 / SPI5 MISO |
D3 |
3.3 V |
GPIO |
D4 |
3.3 V |
TIM3 CH2 / TIM8 CH2 / USART6 RX |
D5 |
3.3 V |
TIM3 CH1 / TIM8 CH1 / USART6 TX |
D6 |
3.3 V |
TIM1 CH1 / I2C3 SCL |
D7 |
3.3 V |
TIM5 CH4 / SPI2 NSS |
D8 |
3.3 V |
SPI2 MOSI (megosztva A3 / A5 lábbal) |
D9 |
3.3 V |
SPI2 SCK |
D10 |
3.3 V |
SPI2 MISO (megosztva A2 / A4 lábbal) |
D11 |
3.3 V |
I2C3 SDA |
D12 |
3.3 V |
I2C3 SCL |
D13 |
3.3 V |
USART1 RX / TIM1 CH3 |
D14 |
3.3 V |
USART1 TX / TIM1 CH2 |
A0 |
3.3 V |
ADC12 IN0 (csak analóg) |
A1 |
3.3 V |
ADC12 IN1 (csak analóg) |
A2 |
3.3 V |
ADC123 IN12 (csak analóg; megosztva D10 lábbal) |
A3 |
3.3 V |
ADC12 IN13 (csak analóg; megosztva D8 lábbal) |
A4 |
3.3 V |
ADC123 IN12 (megosztva D10 lábbal) |
A5 |
3.3 V |
ADC12 IN13 (megosztva D8 lábbal) |
A6 |
3.3 V |
DAC1 OUT1 / ADC12 IN18 |
A7 |
3.3 V |
TIM3 CH1 / ADC12 IN3 (a tűsorokon nincs kivezetve) |
D20 |
3.3 V |
a |
D21 |
3.3 V |
az |
RESET |
3.3 V |
nyomd meg a panelre szerelt kapcsolót vagy húzd GND-re az alaphelyzetbe állításhoz |
LED_RED |
3.3 V |
RGB LED vörös csatornája (aktív alacsony) |
LED_GREEN |
3.3 V |
RGB LED zöld csatornája (aktív alacsony) |
LED_BLUE |
3.3 V |
RGB LED kék csatornája (aktív alacsony) |
Megjegyzés
Az A0-A3 csak analóg kivezetések az STM32H747-en, GPIO funkció nélkül — kezeld őket kizárólag ADC bemenetként. Az A2/A4 és az A3/A5 a fizikai lábaikat a D10 illetve a D8 lábbal osztják meg, így nem tudsz PWM-et vagy SPI-t vezérelni rajtuk, miközben analógként olvasod őket. Az A7 az alsó HD csatlakozókon található.
Tápláb¶
MKR tűsor lábai:
VIN — a fő rendszersín a panelre szerelt PMIC-be. Egy diódán keresztül táplálva a
+5Vsínről, az MKRVINlábról vagy az alsó 80 lábú HD csatlakozókról.+5V — 5 V-os sín, amelyet az USB, az ESLOV csatlakozó vagy maga az MKR
+5Vláb táplál.+3V3 — fő 3,3 V-os sín (a PMIC kapcsolóüzemű szabályozójának kimenete).
AREF — analóg feszültségreferencia az ADC lábakhoz. Alapértelmezetten 3,3 V; kívülről hajtsd meg, ha más referenciát szeretnél használni.
GND — közös föld.
Akkumulátor bemenet:
A panel elején lévő Li‑Po JST egy 3,7 V-os Li‑Po cellát fogad. A PMIC tölti azt, amikor
+5VvagyVINjelen van.
A Portenta H7 az alábbi útvonalak bármelyikén keresztül táplálható:
USB‑C — 5 V-ot szolgáltat a panelre szerelt PMIC-nek.
ESLOV csatlakozó — legfeljebb 5 V a
VESLOVlábon (lásd ESLOV csatlakozó).VIN láb — közvetlenül egy szabályozott 5 V-os tápot hajts meg.
Li‑Po akkumulátor — csatlakoztasd az elülső JST-hez.
ESLOV csatlakozó¶
A panel oldalán egy 5 lábú, forrasztásmentes ESLOV csatlakozó található:
Láb |
Név |
Funkció |
|---|---|---|
1 |
VESLOV |
5 V-os tápkimenet (ugyanaz a sín, mint az MKR tűsor |
2 |
INT |
külső megszakítás bemenet a |
3 |
SCL_EXT |
megosztva az MKR tűsor |
4 |
SDA_EXT |
megosztva az MKR tűsor |
5 |
GND |
közös föld |
Az ESLOV SCL_EXT/SDA_EXT és az MKR tűsor D12/D11 lábai ugyanazok — egyetlen I²C 3 busz, két csatlakozón kivezetve.
Javaslat
Használd a akkumulátor-élettartam becslőt annak modellezésére, hogy a Portenta H7 egy adott aktív / mélyalvás kitöltési tényező mellett mennyi ideig fog működni akkumulátorról.
Helyreállítási és hibakeresési lábak¶
RESET — egyrészt egy kivezetett láb a felső tűsoron, másrészt egy pillanatkapcsoló a panel oldalán, mindkettő a SoC NRST vonalához kötve. Húzd GND-re vagy nyomd meg a gombot az alaphelyzetbe állításhoz.
A Portenta H7 az Arduino szabványos dupla koppintásos resetjét használja az Arduino rendszerbetöltőjébe való belépéshez. Nyomd meg gyorsan kétszer a reset gombot — a panel DFU eszközként újra felsorolódik az USB-n, és az OpenMV IDE új firmware-képet tud flashelni.
Az STM32 SWD jeleit az alsó HD csatlakozó J1 vezeti ki:
J1‑73— NRSTJ1‑75— SWDIO (PA13)J1‑77— SWCLK (PA14)J1‑79— SWO (PB3)
Vezetékezd be őket egy Portenta Breakouton, a hivatalos Arduino hibakereső adapteren vagy egy 1,27 mm-es tűsorral ellátott egyedi hordozópanelen keresztül. Minden hibakeresési jel 3,3 V-ra referált.
Megjegyzés
Amikor a Portenta Vision Shield csatlakoztatva van, ugyanazok az SWD/JTAG jelek a kiegészítőn lévő szabványos 20 lábú ARM Cortex Debug JTAG tűsorra vannak vezetve (1,27 mm / 0,05″ osztás).
Panelre szerelt perifériák¶
LED-ek¶
A Portenta H7 egyetlen felhasználói RGB LED-del rendelkezik, amely szoftveresen vezérelhető a machine.LED segítségével:
from machine import LED
LED("LED_RED").on()
LED("LED_GREEN").on()
LED("LED_BLUE").on()
Egy különálló narancssárga töltés LED az akkumulátor JST mellett akkor világít, amikor a panelre szerelt töltő áramot táplál egy csatlakoztatott Li‑Po cellába; ez nem felhasználó által vezérelhető.
Kamera-érzékelő (Vision Shield)¶
A csatlakoztatott Portenta Vision Shield (Ethernet vagy LoRa kiadás) esetén a Himax érzékelő a csi — kameraérzékelők modulon keresztül vezérelhető:
import csi
cam = csi.CSI()
cam.reset()
cam.pixformat(csi.GRAYSCALE)
cam.framesize(csi.QVGA)
cam.snapshot(time=2000) # let auto‑exposure settle
while True:
img = cam.snapshot()
Két Vision Shield változat támogatott:
HM01B0 — 320 × 320 monokróm.
HM0360 — 640 × 480 monokróm.
Figyelem
Amíg a Vision Shield kamera inicializálva van, az alábbi MKR tűsor lábakat a firmware lefoglalja, és nem használhatók:
MKR láb |
Ok |
|---|---|
|
TIM1 CH1 — kamera mesterórajel |
|
TIM1 CH1 (alt) — kamera mesterórajel |
|
I²C 3 SDA — megosztva a kamerával; a busz használható, de kerüld az érzékelő I²C címét ( |
|
I²C 3 SCL — megosztva a kamerával; a busz használható, de kerüld az érzékelő I²C címét ( |
|
DCMI HSYNC — egyúttal letiltja a DAC-ot |
|
DCMI PXCLK |
Gépi tanulás¶
A ml — Gépi tanulás kvantált TFLite modelleket futtat a Cortex‑M7-en CMSIS‑NN kernelekkel — elég gyorsan ahhoz, hogy kompakt detektorokat néhány képkocka/másodperc sebességgel futtasson. A csak olvasható /rom fájlrendszeren lévő modellek közvetlenül a flash memóriából töltődnek be, RAM-ba másolás nélkül. Íme egy 128×128-as BlazeFace detektor, amely az észlelt arcot és annak hat jellemzőpontját rávetíti a Vision Shield kamera minden képkockájára:
import csi
import time
import ml
from ml.postprocessing.mediapipe import BlazeFace
# Initialize the sensor.
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.GRAYSCALE)
csi0.framesize(csi.QVGA)
csi0.window((240, 240))
# Load built-in face detection model
model = ml.Model("/rom/blazeface_front_128.tflite", postprocess=BlazeFace(threshold=0.4))
print(model)
clock = time.clock()
while True:
clock.tick()
img = csi0.snapshot()
# faces is a list of ((x, y, w, h), score, keypoints) tuples
for r, score, keypoints in model.predict([img]):
ml.utils.draw_predictions(img, [r], ("face",), ((0, 0, 255),), format=None)
# keypoints is a ndarray of shape (6, 2)
ml.utils.draw_keypoints(img, keypoints, color=(255, 0, 0))
print(clock.fps(), "fps")
M4 mag¶
A Cortex‑M4 mag a openamp modulon keresztül érhető el a processzorok közötti kommunikációhoz. Az OpenMV firmware csak az M7-en fut; az M4-nek nincs saját MicroPython futtatókörnyezete, így a használata azt jelenti, hogy külön C firmware-képet kell készíteni és azt a fájlrendszerből betölteni az openamp.RemoteProc segítségével. Egy előre elkészített példa firmware, amely egy virtuális UART végpontot valósít meg, elérhető az openamp_vuart tárolóban — kövesd a README-jét a vuart.elf elkészítéséhez:
import openamp
import time
def ept_recv_callback(src_addr, data):
print("Received:", data.decode())
ept = openamp.Endpoint("vuart-channel", callback=ept_recv_callback)
rproc = openamp.RemoteProc("vuart.elf")
rproc.start()
count = 0
while True:
if ept.is_ready():
ept.send("Hello World %d!" % count, timeout=1000)
count += 1
time.sleep_ms(1000)
A gyakorlatban ezt a támogatást leginkább az openamp interfész demonstrációjának érdemes tekinteni, nem pedig működő kétmagos platformnak — az M4 nem állítható alaphelyzetbe az M7-től függetlenül, így az M4 leállítása a teljes rendszer újraindítását kényszeríti ki.
Mikrofon (Vision Shield)¶
A Vision Shield két PDM mikrofont hordoz, amelyeket a audio — Audio modul segítségével rögzít az STM32 SAI4 perifériáján keresztül. Minden puffer előjeles 16 bites PCM bytearray formában érkezik, készen arra, hogy betápláld a ulab/numpy modulba DSP-hez — például egy egyszerű hangerő-érzékelőhöz:
import audio
from ulab import numpy as np
def loudness(pcmbuf):
samples = np.array(np.frombuffer(pcmbuf, dtype=np.int16), dtype=np.float)
rms = np.sqrt(np.mean(samples ** 2))
if rms > 10000:
print("Loud!", int(rms))
audio.init(channels=1, frequency=16000, gain_db=24)
audio.start_streaming(loudness)
while True:
pass
Add át a channels=2 paramétert az audio.init függvénynek, hogy mindkét mikrofonból egymásba fűzött mintákat kapj.
Akkumulátor töltöttségmérő¶
A Maxim MAX17262 ModelGauge m5 töltöttségmérő követi a Li‑Po akkumulátor feszültségét, áramát, hőmérsékletét és töltöttségi állapotát. Az I²C 1 buszon helyezkedik el a 0x36 címen.
A MAX17262 belső árammérővel rendelkezik, így az áramregiszter közvetlenül mikroamperben olvasható ki, külső Rsense tényező alkalmazása nélkül. A töltöttségmérő olvasása ártalmatlan — nincs hozzá szállított illesztőprogram, de a MAX17262 adatlapban dokumentált regiszterek közvetlenül olvashatók:
import time
import struct
from machine import I2C
FUEL_GAUGE = 0x36 # MAX17262
def read_reg(bus, addr, reg):
return struct.unpack("<H", bus.readfrom_mem(addr, reg, 2))[0]
def read_signed(bus, addr, reg):
v = read_reg(bus, addr, reg)
return v - 0x10000 if v & 0x8000 else v
bus = I2C(1)
while True:
# 0x05 RepCap — remaining capacity, raw × 0.5 mAh
rep_cap = read_reg(bus, FUEL_GAUGE, 0x05) * 0.5
# 0x06 RepSOC — state of charge, raw / 256 %
soc = read_reg(bus, FUEL_GAUGE, 0x06) / 256
# 0x08 Temp — die temperature, signed, raw / 256 °C
temp = read_signed(bus, FUEL_GAUGE, 0x08) / 256
# 0x09 VCell — battery voltage, raw × 78.125 µV
vcell = read_reg(bus, FUEL_GAUGE, 0x09) * 78.125 / 1_000_000
# 0x0A Current — signed, raw × 156.25 µA
current = read_signed(bus, FUEL_GAUGE, 0x0A) * 156.25 / 1000
# 0x0B AvgCurrent — averaged current
avg_curr = read_signed(bus, FUEL_GAUGE, 0x0B) * 156.25 / 1000
# 0x10 FullCapRep — learned full capacity, raw × 0.5 mAh
full_cap = read_reg(bus, FUEL_GAUGE, 0x10) * 0.5
# 0x11 TTE — time-to-empty (valid while discharging), raw × 5.625 s
tte_s = read_reg(bus, FUEL_GAUGE, 0x11) * 5.625
# 0x20 TTF — time-to-full (valid while charging), raw × 5.625 s
ttf_s = read_reg(bus, FUEL_GAUGE, 0x20) * 5.625
# 0x17 Cycles — charge-cycle counter, 1% per LSB
cycles = read_reg(bus, FUEL_GAUGE, 0x17) / 100
print("V: %.3f V" % vcell)
print("Capacity: %.1f / %.1f mAh (%.1f %%)" % (rep_cap, full_cap, soc))
print("Temp: %.1f C" % temp)
print("Current: %.1f mA (avg %.1f mA)" % (current, avg_curr))
print("TTE: %.0f s TTF: %.0f s" % (tte_s, ttf_s))
print("Cycles: %.2f" % cycles)
print()
time.sleep_ms(1000)
A Current előjeles kettes komplemensű érték: pozitív töltés közben, negatív kisütés közben. A TTE csak akkor értelmes, amikor az áram negatív; a TTF csak akkor, amikor az áram pozitív.
Energiagazdálkodási IC¶
Az NXP PF1550 PMIC kezeli a Portenta H7 összes szabályozóját — a +3V3 fő sínt, a +1V8 SoC mag / I/O sínt és a Li‑Po töltőt. Az I²C 1 buszon helyezkedik el a 0x08 címen.
Figyelem
A PMIC regiszterek olvasása rendben van; az írásuk viszont veszélyes. Egy buck szabályozó vagy töltőbeállítás hibás konfigurálása maradandóan károsíthatja a panelt, az akkumulátort vagy mindkettőt. Kezeld a PMIC-et csak olvashatóként, hacsak nem tudod pontosan, mit csinálsz.
A leghasznosabb dolog, amit a PMIC elárul, és amit a töltöttségmérő nem tud, a töltő állapotgépe — hogy a panel jelenleg USB-ről / ESLOV-ról / VIN-ről fut-e, a Li‑Po a töltési ciklus melyik szakaszában van, és hogy a töltő termikus vagy watchdog hibában van-e. A töltő regiszterei a PF1550 fő I²C címterében 0x80 eltolással helyezkednek el (lásd a PF1550 adatlap 22.2. szakaszát), így például a 0x04 töltőcímen lévő CHG_INT_OK a PMIC 0x84 regiszteréből olvasható:
import time
from machine import I2C
PMIC = 0x08
# Charger state machine (low nibble of CHG_SNS, register 0x87)
CHG_STATES = {
0x0: "precharge",
0x1: "fast charge (constant current)",
0x2: "fast charge (constant voltage)",
0x3: "end of charge",
0x4: "done",
0x6: "timer fault",
0x7: "thermistor suspend",
0x8: "off — input invalid or charger disabled",
0x9: "battery overvoltage",
0xA: "thermal shutdown",
0xC: "linear mode (not charging)",
}
bus = I2C(1)
while True:
# 0x84 CHG_INT_OK — single-bit indicators
ok = bus.readfrom_mem(PMIC, 0x84, 1)[0]
vbus_ok = bool(ok & (1 << 5)) # bit 5 — VBUS valid (USB/VIN)
bat_ok = bool(ok & (1 << 2)) # bit 2 — battery OK
chg_ok = bool(ok & (1 << 3)) # bit 3 — charger actively charging
thm_ok = bool(ok & (1 << 7)) # bit 7 — thermistor in normal range
# 0x87 CHG_SNS — charger state + thermal regulation flag
chg_sns = bus.readfrom_mem(PMIC, 0x87, 1)[0]
state = CHG_STATES.get(chg_sns & 0x0F, "reserved")
treg = bool(chg_sns & (1 << 7)) # thermal regulation active
print("VBUS valid: ", vbus_ok)
print("battery OK: ", bat_ok)
print("charger active: ", chg_ok)
print("thermistor normal: ", thm_ok)
print("thermal reg active: ", treg)
print("state: ", state)
print()
time.sleep_ms(1000)
További, az adatlapban érdemes megnézendő, csak olvasható regiszterek (mind 0x80 töltő-eltolással): 0x80 CHG_INT (rögzített töltő megszakítások — hibajelzők), 0x86 VBUS_SNS (a többbites VBUS állapot, beleértve az OVLO / UVLO / DPM értékeket) és 0x88 BATT_SNS (akkumulátor jelenléte és túláram állapota).
Wi‑Fi¶
A panelre szerelt Murata 1DX (CYW4343W) a network — hálózati konfiguráció modulon keresztül érhető el állomás (station) interfészként. Csatlakoztasd a mellékelt antennát a panelre szerelt U.FL csatlakozóhoz, mielőtt elindítod a rádiót:
import network, time
wlan = network.WLAN(network.STA_IF)
wlan.active(True)
wlan.connect("ssid", "password")
while not wlan.isconnected():
time.sleep(1)
print("Wi‑Fi IP:", wlan.ipconfig("addr4")[0])
Bluetooth¶
Ugyanaz a Murata 1DX a Bluetooth LE 5.1-et is kivezeti. Használd az aioble — Aszinkron BLE modult az asyncio-barát BLE-hez — például hirdesd magad perifériaként, és várd, hogy egy központi eszköz csatlakozzon:
import asyncio
import aioble
async def run():
while True:
conn = await aioble.advertise(250_000, name="Portenta-H7")
print("Connected:", conn.device)
await conn.disconnected()
asyncio.run(run())
LoRa (Vision Shield)¶
A Vision Shield LoRa kiadása egy Murata CMWX1ZZABZ LoRaWAN modult ad hozzá, amely UART-on keresztül van a Portenta H7-hez vezetékezve. A lora modul becsomagolja az AT-parancsos firmware-t, és támogatja az OTAA vagy ABP csatlakozást, a feltöltést és a letöltést:
from lora import Lora
from lora import BAND_EU868
from lora import LoraErrorTimeout
lora = Lora(band=BAND_EU868, poll_ms=60000)
print("Device EUI:", lora.get_device_eui())
appEui = "1234567890123456"
appKey = "12345678901234567890123456789012"
try:
lora.join_OTAA(appEui, appKey)
except LoraErrorTimeout as e:
print("Join timed out — try moving near a window:", e)
lora.set_port(3)
lora.send_data("HeLoRA world!", True)
while True:
if lora.available():
data = lora.receive_data()
if data:
print("Port:", data["port"], "Data:", data["data"])
lora.poll()
Használd a BAND_US915 / BAND_AS923 / BAND_AU915 stb. értékeket az EU-n kívüli régiókhoz, és válts a lora.Lora.join_ABP() metódusra, ha a hálózati kiszolgálód ABP aktiválást használ.
Figyelem
Amíg a LoRa modul használatban van, az illesztőprogram az alábbi MKR tűsor lábakat foglalja le vezérlővonalakként a Murata CMWX1ZZABZ számára — ezek nem használhatók:
MKR láb |
Ok |
|---|---|
|
LoRa modul BOOT lába |
|
LoRa modul RST lába |
Ethernet (Vision Shield)¶
A Vision Shield Ethernet kiadása egy RJ45 csatlakozót ad hozzá mágnesekkel, amely az STM32H747 10/100 Ethernet MAC-jához van vezetékezve RMII-n keresztül. Dugj be egy Ethernet kábelt, és a PHY LAN interfészként jelenik meg; a DHCP automatikusan lefut, amint a kapcsolat létrejön:
import network
import time
lan = network.LAN()
lan.active(True)
while not lan.isconnected():
time.sleep(1)
print("Ethernet IP:", lan.ipconfig("addr4")[0])
microSD kártya (Vision Shield)¶
Amikor egy kártyát behelyezel, az automatikusan felcsatolódik a /sdcard helyre, és a szokásos fájlrendszeren keresztül használható:
import os
for entry in os.listdir("/sdcard"):
print(entry)
Buszreferencia¶
GPIO¶
Használd a machine.Pin osztályt bármelyik szitanyomott láb olvasásához vagy meghajtásához. A kimenetek 3,3 V-os CMOS szintűek, és lábanként legfeljebb 20 mA-t tudnak nyelni/forrásolni (a teljes tűsoron összesen 140 mA).
from machine import Pin
out = Pin("D0", Pin.OUT)
out.on()
out.off()
out.value(1)
inp = Pin("D1", Pin.IN, Pin.PULL_UP)
print(inp.value())
Bármelyik bemeneti láb megszakítást is kiválthat élváltásokkor:
def handler(pin):
print("triggered:", pin)
Pin("D1", Pin.IN, Pin.PULL_UP).irq(
handler, Pin.IRQ_FALLING | Pin.IRQ_RISING,
)
UART¶
Busz |
TX |
RX |
|---|---|---|
UART1 |
D14 |
D13 |
UART6 |
D5 |
D4 |
from machine import UART
uart = UART(1, baudrate=115200)
uart.write("hello")
uart.read(5)
I²C¶
Busz |
SCL |
SDA |
|---|---|---|
I2C3 |
D12 |
D11 |
from machine import I2C
i2c = I2C(3, freq=400_000)
i2c.scan()
i2c.writeto(0x76, b"hi")
Az MKR tűsor D11/D12 kivezetései és az ESLOV csatlakozó SDA_EXT/SCL_EXT lábai ugyanarra az I²C 3 buszra futnak — az ESLOV lábkiosztásához lásd a fenti ESLOV csatlakozó részt.
Ugyanaz a hardver cél (slave) módban is használható a machine.I2CTarget segítségével, hogy egy memóriaterületet egy másik I²C vezérlő számára tegyen elérhetővé:
from machine import I2CTarget
buf = bytearray(32)
target = I2CTarget(3, addr=0x42, mem=buf)
SPI¶
Busz |
MOSI |
MISO |
SCK |
CS |
|---|---|---|---|---|
SPI2 |
D8 |
D10 |
D9 |
D7 |
from machine import SPI
from machine import Pin
spi = SPI(2, baudrate=10_000_000)
cs = Pin("D7", Pin.OUT, value=1) # CS is not driven by the SPI peripheral
cs.value(0)
spi.write(b"hello")
cs.value(1)
ADC¶
A Portenta H7 nyolc 12 bites ADC csatornát vezet ki az A0–A7 lábakon. Mindegyik 3,3 V-ra referált — a read_u16 0–65535 értéket ad vissza a 0–3,3 V tartományban a lábon:
from machine import ADC
import time
adc = ADC("A0")
while True:
voltage = adc.read_u16() * 3.3 / 65535
print(voltage)
time.sleep_ms(100)
DAC¶
Egyetlen 12 bites DAC csatorna van kivezetve a DAC1-en (A6 / D21) a pyb.DAC osztályon keresztül:
from pyb import DAC
dac = DAC("DAC1")
dac.write(int(0.5 * 255)) # 8‑bit output, ~1.65 V
PWM¶
Láb |
Időzítő / csatorna |
|---|---|
D0 |
TIM8 CH3N |
D1 |
TIM1 CH1, TIM8 CH3N |
D2 |
TIM1 CH2, TIM8 CH2N |
D4 |
TIM3 CH2, TIM8 CH2 |
D5 |
TIM3 CH1, TIM8 CH1 |
D6 |
TIM1 CH1 |
D7 |
TIM5 CH4 |
D13 |
TIM1 CH3 |
D14 |
TIM1 CH2 |
A7 |
TIM3 CH1 |
Hajtsd meg bármelyiket a machine.PWM segítségével:
from machine import Pin, PWM
pwm = PWM(Pin("D4"), freq=1_000, duty_u16=32768)
Megjegyzés
Több láb is osztozik időzítő-csatornákon:
A TIM1 CH1 a
D1és aD6lábon van.A TIM1 CH2 a
D2és aD14lábon van.A TIM8 CH3N a
D0és aD1lábon van.
Válassz egyetlen fogyasztót időzítő-csatornánként.
Figyelem
A TIM1 a kamera mesterórajel számára van fenntartva, amikor a Vision Shield a csi — kameraérzékelők modulon keresztül inicializálódik — a D1, D2, D6, D13 és D14 lábak nem hajthatók meg PWM-mel, amíg a kamera aktív.
Szoftveresen kapcsolgatott (bit‑banged) buszok¶
A machine.SoftI2C és a machine.SoftSPI bármely GPIO-n működik, ha egy extra buszra van szükséged.
Hőérzékelő (paneltől különálló)¶
A firmware tartalmazza a fir — hőérzékelő-meghajtó (fir == far infrared, távoli infravörös) illesztőprogramot a kívülről bekötött hőkamerákhoz:
MLX90621 — 16 × 4 IR tömb
MLX90640 — 32 × 24 IR tömb
MLX90641 — 16 × 12 IR tömb
AMG8833 — 8 × 8 IR tömb
Vezetékezd a modult a panel I²C buszára, és olvass be képkockákat a fir.init() + fir.snapshot() segítségével:
import time
import image
import fir
fir.init() # auto‑detects the sensor
clock = time.clock()
while True:
clock.tick()
try:
img = fir.snapshot(x_scale=5, y_scale=5,
color_palette=image.PALETTE_IRONBOW,
hint=image.BICUBIC,
copy_to_fb=True)
except OSError:
continue
print(clock.fps())
A fir illesztőprogram csak az I²C 3 buszon kommunikál az érzékelővel — vezetékezd a modult a D12 (SCL) és a D11 (SDA) lábra.
Időzítés¶
time¶
A time modul lefedi a blokkoló késleltetéseket, a monoton ütemeket és az eltelt idő mérését:
import time
time.sleep(1) # seconds
time.sleep_ms(500)
time.sleep_us(10)
start = time.ticks_ms()
# ...do work...
elapsed = time.ticks_diff(time.ticks_ms(), start)
Virtuális időzítők¶
A machine.Timer periodikus vagy egyszeri visszahívásokat ütemez anélkül, hogy hardveres időzítő-helyet foglalna le. Add át a -1 értéket azonosítóként egy virtuális (szoftveres) időzítő használatához:
from machine import Timer
one_shot = Timer(-1)
one_shot.init(period=5_000, mode=Timer.ONE_SHOT,
callback=lambda t: print("once"))
periodic = Timer(-1)
periodic.init(period=2_000, mode=Timer.PERIODIC,
callback=lambda t: print("tick"))
A periódusértékek ezredmásodpercben vannak megadva. Hívd meg a deinit() metódust a leállításhoz és a hely felszabadításához.
Valós idejű óra¶
A machine.RTC resetek között is megtartja a faliórán mért időt. A HD csatlakozó kivezet egy COINCELL kivezetést is, amely egy CR2032-ről táplálhatja az RTC-t áramkimaradás esetén:
from machine import RTC
rtc = RTC()
rtc.datetime((2026, 4, 30, 4, 12, 0, 0, 0)) # Y, M, D, weekday, h, m, s, subsec
print(rtc.datetime())
Watchdog¶
A machine.WDT alaphelyzetbe állítja a panelt, ha az alkalmazás lefagy. Az elindítása után nem állítható le és nem konfigurálható újra — periodikusan tápláld a fő ciklusodon belül:
from machine import WDT
wdt = WDT(timeout=5_000) # 5 second window
while True:
# ...do work...
wdt.feed()
Indítási és futásidejű információk¶
Firmware-frissítés (DFU)¶
A Portenta H7 az Arduino szabványos dupla koppintásos resetjét használja az Arduino rendszerbetöltőjébe való belépéshez. Nyomd meg gyorsan kétszer a reset gombot — a panel DFU eszközként újra felsorolódik az USB-n, és az OpenMV IDE új firmware-képet tud flashelni.
Egy futó szkript igény szerint újra beléphet a rendszerbetöltőbe a machine.bootloader() meghívásával:
import machine
machine.bootloader()
Fájlrendszer és indítási sorrend¶
A Portenta H7 firmware induláskor legfeljebb három fájlrendszert csatol fel:
Belső flash memória — mindig a
/flashhelyre csatolva. Alapértelmezetten amain.pyés aREADME.txtfájlokat tartalmazza; a legelső indításkor jön létre.microSD kártya — ha egy Vision Shield csatlakoztatva van és egy kártya be van helyezve, akkor a
/sdcardhelyre csatolódik.ROMFS — csak olvasható, memóriába leképezett fájlrendszer a
/romhelyen, amelyet a MicroPython induláskor automatikusan felcsatol.
A felcsatolás után a munkakönyvtár a /sdcard lesz, ha a kártya jelen van, egyébként a /flash. Az értelmező ezután abból a könyvtárból futtatja a szkripteket:
A
boot.pyminden szoftveres reset alkalmával lefut (hidegindítás,Ctrl‑Da REPL-ből, vagy amikor a futó szkript visszatér).A
main.pycsak hidegindításkor fut le, közvetlenül aboot.pyután. A későbbi szoftveres resetek újrafuttatják aboot.py-t, de egyből a REPL-re ugranak — amain.pyújrafuttatásához teljesen alaphelyzetbe kell állítanod a panelt.
Egy boot.py vagy main.py fájl SD kártyára helyezése felülírja a flash memóriában lévő példányt anélkül, hogy hozzányúlna — mindkét fájlt az indítási könyvtárban keresi a rendszer (/sdcard, amikor a kártya fel van csatolva, egyébként /flash).
A frissen flashelt panelen szállított alapértelmezett main.py csak a felhasználói RGB LED kék csatornáját villogtatja szívverésként (két rövid impulzus, rövid szünet), így anélkül is megtudhatod, hogy a firmware tisztán elindult-e, hogy bármilyen gazdagép csatlakoztatva lenne.
A sys.path kibővül, hogy mindhárom fájlrendszert és azok lib/ alkönyvtárait tartalmazza, így az importálható modulok élhetnek a /flash/lib, /sdcard/lib vagy /rom/lib helyen.
Ahhoz, hogy a rendszert egy behelyezett SD kártya figyelmen kívül hagyására kényszerítsd (például, hogy a flash main.py-t futtasd akkor is, ha kártya van jelen), hozz létre egy SKIPSD nevű üres fájlt a /flash gyökerében.
Amikor USB-n keresztül csatlakozik, az indítási fájlrendszer (/sdcard, ha kártya van jelen, egyébként /flash) USB háttértár-meghajtóként is felsorolódik a gazdagépen, lehetővé téve a boot.py, a main.py és bármely más fájl közvetlen szerkesztését. Vesd ki a meghajtót, mielőtt alaphelyzetbe állítod a panelt, hogy a gazdagép kiürítse a gyorsítótárazott írásokat.
Megjegyzés
Mivel az operációs rendszer a meghajtót passzív blokkeszközként kezeli, a kamerán futó kód által létrehozott vagy módosított fájlok nem jelennek meg, amíg a gazdagép újra fel nem csatolja a meghajtót. Ha az operációs rendszer és a kamera egyszerre írja ugyanazt a fájlrendszert, az operációs rendszer nyer, és felülírja a kamera által végrehajtott módosításokat. Használd az SD kártyát minden olyan adathoz, amit a szkript visszaír, és csatold fel újra, mielőtt ezeket a fájlokat a gazdagépről olvasnád.
Megjegyzés
A felhasználói RGB LED vörös csatornája röviden felvillanhat, amíg a gazdagép az USB háttértár-meghajtóról olvas vagy arra ír — ez egy firmware által vezérelt tevékenységjelző, nem hiba.
Tárolóméretek¶
A Portenta H7 az alábbiakkal érkezik:
/flash— 11 MB FAT fájlrendszer, írható/olvasható./rom— 4 MB csak olvasható, memóriába leképezett ROMFS, amelyet olyan szkriptek és ML modellek szállítására használnak, amelyek profitálnak a másolásmentes mmap hozzáférésből./sdcard— a Vision Shieldbe behelyezett microSD kártya teljes mérete (ha jelen van), írható/olvasható.
Hard‑fault jelző¶
Ha a felhasználói RGB LED gyorsan végigfut az összes színen — elég gyorsan ahhoz, hogy inkább csillámló fehér LED-nek tűnjön, mint különálló árnyalatoknak —, akkor a firmware helyrehozhatatlan hard faultba ütközött. A helyreállításhoz flasheld újra a firmware-t; ha az újraflashelés nem segít, a panel fizikailag megsérülhetett.
Szoftverkönyvtárak¶
A modulok teljes listájáért lásd a könyvtárindexet — beleértve azt is, hogy melyikek egyediek a Portenta H7 buildhez.