Arduino Nano RP2040 Connect¶
Figyelem
Ez a panel már nem támogatott. Az Arduino Nano RP2040 Connecthez kiadott utolsó OpenMV firmware a 4.7.0. Ehhez a célhoz nem jelenik meg több firmware-frissítés, hibajavítás vagy új funkció. Az alábbi információkat a 4.7.0-s vagy korábbi verziót használók kedvéért őriztük meg.
Az Arduino Nano RP2040 Connect egy 45 × 18 mm-es, Arduino-Nano-formátumú panel, amely a Raspberry Pi RP2040 köré épül — ez egy 133 MHz-en futó, kétmagos ARM Cortex-M0+ processzor 264 KB belső SRAM-mal. A WiFi és a BLE egy U-blox NINA-W102 modultól származik, a panel pedig egy LSM6DSOX 6 tengelyű IMU-t és egy MP34DT06 PDM mikrofont hordoz. Az OpenMV firmware mindezeket MicroPythonból vezérli.
A teljes adatlapért, fényképekért és méretekért lásd az Arduino Nano RP2040 Connect termékoldalt.
Kiemelt jellemzők¶
Raspberry Pi RP2040 kétmagos ARM Cortex-M0+ 133 MHz-en, 264 KB belső SRAM-mal.
16 MB külső QSPI flash memória.
U-blox NINA-W102 modul, amely 2,4 GHz-es Wi-Fi b/g/n és Bluetooth 4.2 (BR/EDR + LE) kapcsolatot biztosít.
LSM6DSOX 6 tengelyű IMU és MP34DT06 PDM mikrofon.
Micro USB csatlakozó a tápellátáshoz, programozáshoz és a CDC REPL-hez.
22 felhasználói I/O láb a szabványos Nano fejléceken —
TX/RX,D2–D13(digitális),A0–A7(analóg).
Lábkiosztás¶
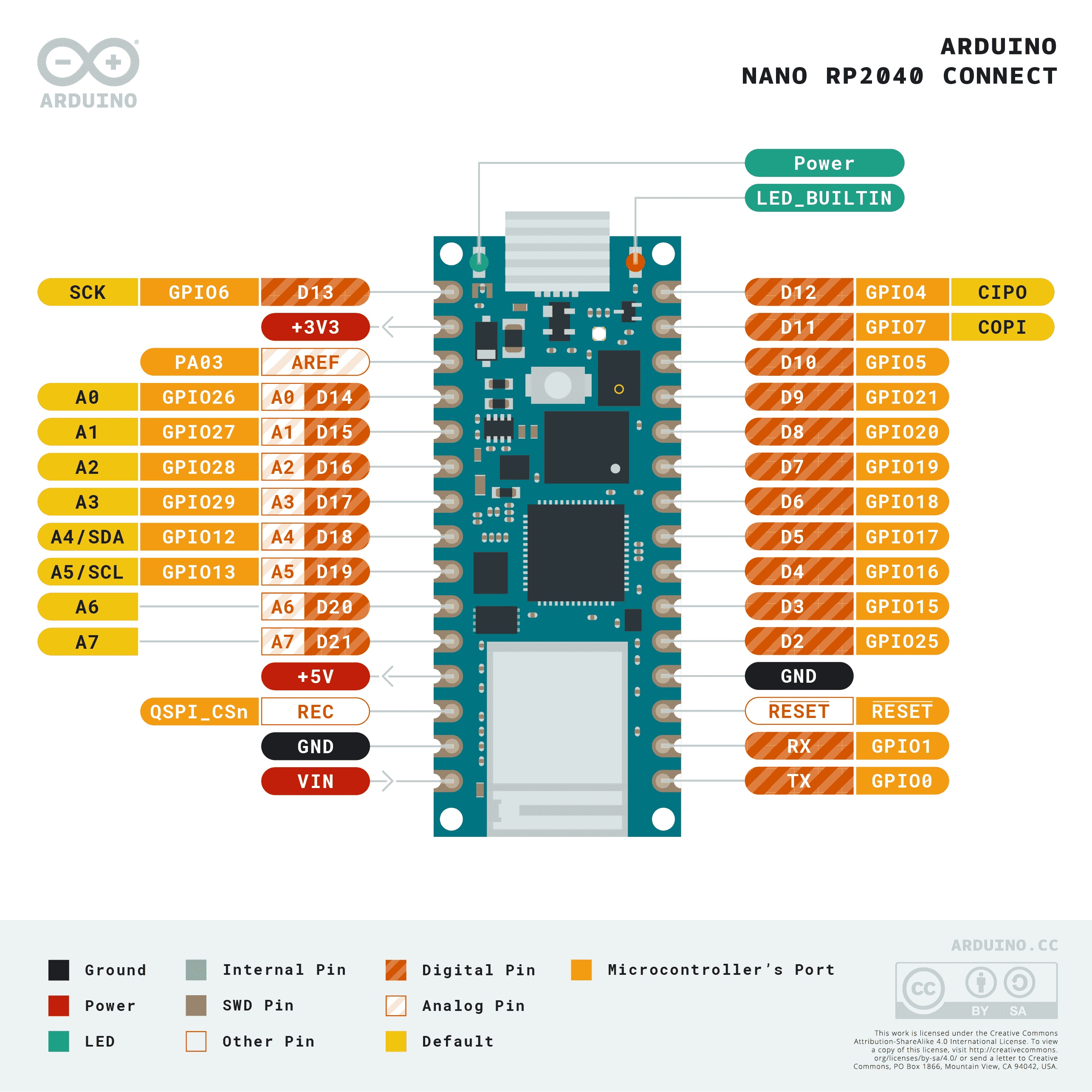
Láb-referencia¶
Láb neve |
Referencia |
Funkció |
|---|---|---|
TX |
3.3 V |
UART0 TX / SPI0 RX / I2C0 SDA / PWM0 A |
RX |
3.3 V |
UART0 RX / SPI0 CS / I2C0 SCL / PWM0 B |
D2 |
3.3 V |
SPI1 CS / UART1 RX / I2C0 SCL / PWM4 B |
D3 |
3.3 V |
SPI1 TX / UART0 RTS / I2C1 SCL / PWM7 B |
D4 |
3.3 V |
SPI0 RX / UART0 TX / I2C0 SDA / PWM0 A |
D5 |
3.3 V |
SPI0 CS / UART0 RX / I2C0 SCL / PWM0 B |
D6 |
3.3 V |
SPI0 SCK / UART0 CTS / I2C1 SDA / PWM1 A |
D7 |
3.3 V |
SPI0 TX / UART0 RTS / I2C1 SCL / PWM1 B |
D8 |
3.3 V |
SPI0 RX / UART1 TX / I2C0 SDA / PWM2 A |
D9 |
3.3 V |
SPI0 CS / UART1 RX / I2C0 SCL / PWM2 B |
D10 |
3.3 V |
SPI0 CS / UART1 RX / I2C0 SCL / PWM2 B |
D11 |
3.3 V |
SPI0 TX / UART1 RTS / I2C1 SCL / PWM3 B |
D12 |
3.3 V |
SPI0 RX / UART1 TX / I2C0 SDA / PWM2 A |
D13 |
3.3 V |
SPI0 SCK / UART1 CTS / I2C1 SDA / PWM3 A |
D14 / A0 |
3.3 V |
ADC / SPI1 SCK / UART1 CTS / I2C1 SDA / PWM5 A |
D15 / A1 |
3.3 V |
ADC / SPI1 TX / UART1 RTS / I2C1 SCL / PWM5 B |
D16 / A2 |
3.3 V |
ADC / SPI1 RX / UART0 TX / I2C0 SDA / PWM6 A |
D17 / A3 |
3.3 V |
ADC / SPI1 CS / UART0 RX / I2C0 SCL / PWM6 B |
D18 / A4 / SDA |
3.3 V |
ADC / I2C0 SDA / SPI1 RX / UART0 TX / PWM6 A |
D19 / A5 / SCL |
3.3 V |
ADC / I2C0 SCL / SPI1 CS / UART0 RX / PWM6 B |
D20 / A6 |
3.3 V |
ADC / GPIO |
D21 / A7 |
3.3 V |
ADC / GPIO |
RESET |
3.3 V |
nyomd meg a panelen lévő RESET gombot, vagy húzd GND-re a visszaállításhoz |
REC |
3.3 V |
BOOTSEL — bekapcsoláskor húzd magasra az RP2040 ROM rendszerbetöltőjébe lépéshez |
LED_BUILTIN |
— |
Narancssárga felhasználói LED a |
LED_RED |
— |
Az RGB LED piros csatornája |
LED_GREEN |
— |
Az RGB LED zöld csatornája |
LED_BLUE |
— |
Az RGB LED kék csatornája |
Figyelem
A Nano RP2040 Connect I/O lábai kizárólag 3,3 V-osak — nem 5 V-tűrők. 5 V rájuk kapcsolása károsítja az RP2040-et.
Tápláblak¶
VIN — 4 – 20 V bemenet. A panelt a beépített kapcsolóüzemű szabályozón keresztül táplálja. Egy diódán át az USB 5 V-os sínjéről is kap táplálást, így az USB és a
VINegyszerre is jelen lehet anélkül, hogy visszatáplálnák egymást.+5V — alapértelmezetten nincs bekötve.
+3V3 — a 3,3 V-os szabályozó kimenete.
AREF — analóg referencialáb. Ezen a panelen nincs az RP2040-hez kötve — az ADC mindig a 3,3 V-hoz van viszonyítva.
GND — közös föld.
A Nano RP2040 Connect bármelyik útvonalon táplálható:
Micro USB — 5 V-ot ad a beépített szabályozónak.
VIN láb — szabályozott 4 – 20 V-os tápforrással hajtsd meg.
Megjegyzés
A panel alján egy forrasztással záródó áthidalás köti a +5V lábat az USB 5 V-os sínjéhez. Zárd le, hogy a +5V fejlécláb ténylegesen 5 V-ot vezessen.
Megjegyzés
A beépített 4–20 V-os kapcsolóüzemű szabályozó kimenetén lévő, alaphelyzetben zárt forrasztott áthidalás elvágható a szabályozó kikapcsolásához, így a panel közvetlenül egy külső 3,3 V-os tápforrásról is táplálható a +3V3 lábon.
Helyreállító és hibakereső lábak¶
RESET — egy kivezetett pad és egy pillanatkapcsoló RESET gomb a panel tetején, amely az RP2040 NRST vonalához van kötve. Húzd GND-re vagy nyomd meg a gombot a visszaállításhoz.
REC — kivezetett pad. A
RECmagasan tartása bekapcsoláskor (vagy a RESET megnyomása közben) az RP2040-et a ROM rendszerbetöltőjébe viszi; a panelRPI-RP2nevű USB-háttértárként újraregisztrál, és elfogad egy.uf2firmware-képet.
A Nano RP2040 Connect az Arduino szabványos dupla koppintásos visszaállítását használja az Arduino rendszerbetöltőjébe lépéshez. Nyomd meg gyorsan kétszer a RESET gombot — a panel UF2 eszközként újraregisztrál az USB-n, és az OpenMV IDE új firmware-képet flashelhet.
Az RP2040 SWD jelei a panel hátoldalán, közvetlenül a NINA modul alatt lévő bevont padokon érhetők el. Minden hibakereső jel 3,3 V-hoz viszonyított.
Beépített perifériák¶
LED-ek¶
A Nano RP2040 Connect rendelkezik egy felhasználói RGB LED-del — a szitanyomott LED_RED, LED_GREEN és LED_BLUE csatornákon keresztül vezérelve — valamint egy külön narancssárga LED_BUILTIN LED-del a D13 lábon. Mind a négy szoftveresen vezérelhető a machine.LED segítségével:
from machine import LED
LED("LED_RED").on()
LED("LED_GREEN").on()
LED("LED_BLUE").on()
LED("LED_BUILTIN").on()
A panelen lévő külön zöld tápellátás LED mindig világít, amíg a +3,3 V-os sín él, és nem vezérelhető a felhasználó által.
Kameraérzékelő¶
A Nano RP2040 Connecten futó OpenMV firmware támogatja az OmniVision OV7670 párhuzamos CMOS érzékelőt. A panelen nincs beépített képérzékelő — kösd be egy OV7670 modult az alább felsorolt szitanyomott fejléclábakhoz, és vezéreld a csi — kameraérzékelők modulon keresztül:
import csi
cam = csi.CSI()
cam.reset()
cam.pixformat(csi.RGB565)
cam.framesize(csi.QVGA)
cam.snapshot(time=2000) # let auto‑exposure settle
while True:
img = cam.snapshot()
Megjegyzés
Az OV7670 14 lábat igényel. A firmware a következőképpen köti be őket:
Érzékelő jele |
Nano RP2040 láb |
|---|---|
D0 |
|
D1 |
|
D2 |
|
D3 |
|
D4 |
|
D5 |
|
D6 |
|
D7 |
|
HSYNC |
|
VSYNC |
|
PXCLK |
|
MXCLK |
|
POWER |
|
RESET |
|
SCL |
|
SDA |
|
Az OV7670 I²C vezérlőbusza meg van osztva a beépített IMU-val és az ATECC608A-val az I²C 0-n. Az érzékelő a 0x21 7 bites címen helyezkedik el — a 0-s buszon lévő felhasználói eszközöknek is el kell kerülniük ezt a címet, ha a kamera be van kötve.
IMU¶
A beépített LSM6DSOX 6 tengelyű gyorsulásmérő + giroszkóp az I2C0-n helyezkedik el. Az rp2 port machine.I2C(0) alapértelmezetten egy másik lábkészletre mutat, ezért add át kifejezetten a szitanyomott SDA/SCL padokat. Használd a beágyazott lsm6dsox.LSM6DSOX illesztőprogramot:
import time
from machine import I2C, Pin
from lsm6dsox import LSM6DSOX
bus = I2C(0, scl=Pin("SCL"), sda=Pin("SDA"))
imu = LSM6DSOX(bus)
while True:
print(imu.accel()) # (x, y, z) in g
print(imu.gyro()) # (x, y, z) in deg/s
time.sleep_ms(100)
Mikrofon¶
A beépített MP34DT06 PDM mikrofont a audio — Audio modul rögzíti az RP2040 egyik PIO blokkjának használatával:
import audio
from ulab import numpy as np
def loudness(pcmbuf):
samples = np.array(np.frombuffer(pcmbuf, dtype=np.int16), dtype=np.float)
rms = np.sqrt(np.mean(samples ** 2))
if rms > 10000:
print("Loud!", int(rms))
audio.init(channels=1, frequency=16000, gain_db=24)
audio.start_streaming(loudness)
while True:
pass
Wi-Fi¶
A beépített NINA-W102 modul a network — hálózati konfiguráció modulon keresztül állomás-interfészként érhető el:
import network, time
wlan = network.WLAN(network.STA_IF)
wlan.active(True)
wlan.connect("ssid", "password")
while not wlan.isconnected():
time.sleep(1)
print("Wi‑Fi IP:", wlan.ipconfig("addr4")[0])
Bluetooth¶
Ugyanaz a NINA modul Bluetooth 4.2 LE-t is biztosít. Használd a aioble — Aszinkron BLE modult az asyncio-barát BLE-hez — például hirdesd magad perifériaként, és várd, hogy egy központ csatlakozzon:
import asyncio
import aioble
async def run():
while True:
conn = await aioble.advertise(250_000, name="Nano-RP2040")
print("Connected:", conn.device)
await conn.disconnected()
asyncio.run(run())
Busz-referencia¶
GPIO¶
Használd a machine.Pin osztályt bármelyik szitanyomott láb olvasásához vagy meghajtásához. A kimenetek 3,3 V-os CMOS-ok, összesen 50 mA nyelőárammal az összes GPIO-n.
from machine import Pin
out = Pin("D2", Pin.OUT)
out.on()
out.off()
out.value(1)
inp = Pin("D3", Pin.IN, Pin.PULL_UP)
print(inp.value())
Bármely bemeneti láb megszakítást is kiválthat élátmenetekkor:
def handler(pin):
print("triggered:", pin)
Pin("D3", Pin.IN, Pin.PULL_UP).irq(
handler, Pin.IRQ_FALLING | Pin.IRQ_RISING,
)
UART¶
Busz |
TX |
RX |
|---|---|---|
UART0 |
TX |
RX |
Használd a szitanyomott TX/RX neveket a machine.UART osztállyal:
from machine import UART
uart = UART(0, baudrate=115200)
uart.write("hello")
uart.read(5)
Megjegyzés
A machine.UART(1) létezik, de a beépített NINA-W102 modul (a BLE kapcsolat) számára van fenntartva; ne használd közvetlenül.
I²C¶
Busz |
SDA |
SCL |
|---|---|---|
I2C0 |
|
|
I2C1 |
|
|
Mindkét buszhoz kifejezetten át kell adni a lábaikat a machine.I2C osztálynak:
from machine import I2C, Pin
bus0 = I2C(0, scl=Pin("SCL"), sda=Pin("SDA"), freq=400_000)
bus0.scan()
bus1 = I2C(1, scl=Pin("A1"), sda=Pin("A0"), freq=400_000)
bus1.scan()
Megjegyzés
Két beépített chip osztozik a 0-s buszon — az ezen a buszon lévő felhasználói eszközöknek el kell kerülniük a címeiket:
0x6A— LSM6DSOX IMU0x60— ATECC608A-MAHDA-T
Az A0/A1 I²C-ként való használata lefoglalja őket a buszhoz, így nem lehetnek egyidejűleg ADC bemenetek is.
Megjegyzés
Az SDA / SCL padok (0-s busz) beépített felhúzó ellenállásokkal rendelkeznek 3,3 V-ra, így nincs szükség külső felhúzókra az adott busz eszközeihez. Az A0 / A1 (1-es busz) nem — adj hozzá külső felhúzókat az 1-es busz használatakor.
Ugyanaz a hardver cél (slave) módban is használható a machine.I2CTarget segítségével, hogy egy memóriaterületet tegyen elérhetővé egy másik I²C vezérlő számára:
from machine import I2CTarget
buf = bytearray(32)
target = I2CTarget(0, addr=0x42, mem=buf)
SPI¶
Busz |
MOSI |
MISO |
SCK |
CS |
|---|---|---|---|---|
SPI0 |
D11 |
D12 |
D13 |
D10 |
Az rp2 port ezen a panelen nem konfigurálja előre az SPI0 lábait, ezért add át kifejezetten a szitanyomott padokat a busz létrehozásakor:
from machine import SPI, Pin
spi = SPI(0, baudrate=10_000_000,
sck=Pin("D13"), mosi=Pin("D11"), miso=Pin("D12"))
cs = Pin("D10", Pin.OUT, value=1) # CS is not driven by the SPI peripheral
cs.value(0)
spi.write(b"hello")
cs.value(1)
Megjegyzés
A D13 egyúttal a narancssárga LED_BUILTIN is — az SPI meghajtása ezen a buszon a busz órajelével együtt villogtatja a LED-et.
Megjegyzés
A machine.SPI(1) létezik, de a beépített NINA-W102 modul (a Wi-Fi/BLE SPI kapcsolat) számára van fenntartva; ne használd közvetlenül.
ADC¶
Az RP2040-nek négy 12 bites ADC csatornája van, amelyek az A0–A3 lábakon érhetők el, mindegyik 3,3 V-hoz viszonyított — a read_u16 0–65535 értéket ad vissza a láb 0–3,3 V tartományában. A panel AREF lába nincs bekötve, így a referencia mindig 3,3 V:
from machine import ADC
import time
adc = ADC("A0")
while True:
voltage = adc.read_u16() * 3.3 / 65535
print(voltage)
time.sleep_ms(100)
PWM¶
Láb |
Szelet / csatorna |
|---|---|
TX |
PWM0 A |
RX |
PWM0 B |
D2 |
PWM4 B |
D3 |
PWM7 B |
D4 |
PWM0 A |
D5 |
PWM0 B |
D6 |
PWM1 A |
D7 |
PWM1 B |
D8 |
PWM2 A |
D9 |
PWM2 B |
D10 |
PWM2 B |
D11 |
PWM3 B |
D12 |
PWM2 A |
D13 |
PWM3 A |
D14 / A0 |
PWM5 A |
D15 / A1 |
PWM5 B |
D16 / A2 |
PWM6 A |
D17 / A3 |
PWM6 B |
D18 / A4 / SDA |
PWM6 A |
D19 / A5 / SCL |
PWM6 B |
Hajtsd meg bármelyiket a machine.PWM segítségével:
from machine import Pin, PWM
pwm = PWM(Pin("D3"), freq=1_000, duty_u16=32768)
Megjegyzés
Több láb is osztozik PWM-szeletcsatornákon:
A PWM0 A a
TXés aD4lábon van.A PWM0 B a
RXés aD5lábon van.A PWM2 A a
D8és aD12lábon van.A PWM2 B a
D9és aD10lábon van.A PWM6 A a
D16/A2és aD18/A4/SDAlábon van.A PWM6 B a
D17/A3és aD19/A5/SCLlábon van.
Szeletcsatornánként egy fogyasztót válassz. Ugyanazon szeleten belül az A és B csatorna osztozik a perióduson (frekvencián), de mindegyiknek saját kitöltési tényezője van.
Szoftveresen bitléptetett buszok¶
A machine.SoftI2C és a machine.SoftSPI bármely GPIO-n működik, ha extra buszra van szükséged.
Hőérzékelő (külső)¶
A firmware tartalmazza a fir — hőérzékelő-meghajtó (fir == far infrared, távoli infravörös) illesztőprogramot egy külsőleg bekötött AMG8833 8×8-as hőkamerához. Csatlakoztasd a modult az alább felsorolt I²C buszra, majd olvasd a képkockákat a fir.init() + fir.snapshot() hívásokkal:
import time
import image
import fir
fir.init() # auto‑detects the sensor
clock = time.clock()
while True:
clock.tick()
try:
img = fir.snapshot(x_scale=5, y_scale=5,
color_palette=image.PALETTE_IRONBOW,
hint=image.BICUBIC,
copy_to_fb=True)
except OSError:
continue
print(clock.fps())
A fir illesztőprogram csak az I²C 0-n keresztül kommunikál az érzékelővel — kösd a modult a szitanyomott SCL / SDA padokhoz. Az érzékelő 7 bites címét (0x69) az adott buszon lévő más eszközök nem használhatják.
Időzítés¶
time¶
A time modul lefedi a blokkoló késleltetéseket, a monoton ütemjeleket és az eltelt idő mérését:
import time
time.sleep(1) # seconds
time.sleep_ms(500)
time.sleep_us(10)
start = time.ticks_ms()
# ...do work...
elapsed = time.ticks_diff(time.ticks_ms(), start)
Virtuális időzítők¶
A machine.Timer periodikus vagy egyszeri visszahívásokat ütemez anélkül, hogy hardveres időzítő helyet foglalna el. Add át a -1 értéket azonosítóként virtuális (szoftveres) időzítő használatához:
from machine import Timer
one_shot = Timer(-1)
one_shot.init(period=5_000, mode=Timer.ONE_SHOT,
callback=lambda t: print("once"))
periodic = Timer(-1)
periodic.init(period=2_000, mode=Timer.PERIODIC,
callback=lambda t: print("tick"))
A periódusértékek milliszekundumban értendők. Hívd meg a deinit() metódust a leállításhoz és a hely felszabadításához.
Valós idejű óra¶
A machine.RTC a visszaállításokon át megőrzi a faliórát. Az RP2040 RTC-je a chipen lévő oszcillátorhoz van kötve, és nem éli túl a teljes áramszünetet — állítsd be az időt minden hidegindításkor, ha ez fontos az alkalmazásod számára:
from machine import RTC
rtc = RTC()
rtc.datetime((2026, 4, 30, 4, 12, 0, 0, 0)) # Y, M, D, weekday, h, m, s, subsec
print(rtc.datetime())
Watchdog¶
A machine.WDT visszaállítja a panelt, ha az alkalmazás lefagy. Indítás után nem állítható le és nem konfigurálható újra — tápláld periodikusan a fő ciklusodon belül:
from machine import WDT
wdt = WDT(timeout=5_000) # 5 second window
while True:
# ...do work...
wdt.feed()
Indítási és futásidejű információk¶
Firmware-frissítés (UF2)¶
A Nano RP2040 Connect az Arduino szabványos dupla koppintásos visszaállítását használja az Arduino rendszerbetöltőjébe lépéshez. Nyomd meg gyorsan kétszer a reset gombot — a panel UF2 eszközként újraregisztrál az USB-n, és az OpenMV IDE új firmware-képet flashelhet.
Egy futó szkript igény szerint újra beléphet a rendszerbetöltőbe a machine.bootloader() hívásával:
import machine
machine.bootloader()
Fájlrendszer és indítási sorrend¶
A Nano RP2040 Connect firmware indításkor egyetlen fájlrendszert csatol:
Belső flash memória — mindig a
/flashponton van csatolva, és munkakönyvtárként szolgál. Alapértelmezetten amain.pyés aREADME.txtfájlokat tartalmazza; az első indításkor jön létre.
A csatolás után az interpreter a /flash-ről futtatja a szkripteket:
A
boot.pyminden szoftveres visszaállításkor lefut.A
main.pycsak hidegindításkor fut le, közvetlenül aboot.pyután.
A frissen flashelt panelen szállított alapértelmezett main.py csak a felhasználói RGB LED kék csatornáját villogtatja szívverésként (két rövid impulzus, rövid szünet), így csatlakoztatott gazdagép nélkül is megállapíthatod, hogy a firmware tisztán elindult.
USB-n keresztül csatlakoztatva a /flash USB-háttértárként jelenik meg a gazdagépen, lehetővé téve a boot.py, a main.py és bármely más fájl közvetlen szerkesztését. Vesd ki a meghajtót, mielőtt visszaállítanád a panelt, hogy a gazdagép kiírja a gyorsítótárazott írásokat.
Megjegyzés
Mivel az operációs rendszer a meghajtót passzív blokkeszközként kezeli, a kamerán futó kód által létrehozott vagy módosított fájlok nem jelennek meg, amíg a gazdagép újra nem csatolja a meghajtót. Ha az operációs rendszer és a kamera egyszerre írja ugyanazt a fájlrendszert, az operációs rendszer nyer, és felülírja a kamera által végzett módosításokat. Használd az SD-kártyát minden olyan adathoz, amelyet a szkript visszaír, és csatold újra, mielőtt ezeket a fájlokat a gazdagépről olvasnád.
Megjegyzés
A felhasználói RGB LED piros csatornája röviden felvillanhat, amíg a gazdagép olvas az USB-háttértárról vagy ír rá — ez egy firmware-vezérelt tevékenységjelző, nem hiba.
Tárhelyméretek¶
A Nano RP2040 Connect a következőkkel érkezik:
/flash— 14 MB FAT fájlrendszer, írható/olvasható.
A Nano RP2040 build nem tartalmaz ROMFS-t; a Python modulokat és az ML modelleket közvetlenül a /flash-en szállítsd.
Szoftverkönyvtárak¶
A modulok teljes listájáért lásd a könyvtárindexet — beleértve azokat is, amelyek csak a Nano RP2040 Connect buildjében egyediek.