Arduino Nicla Vision¶
Az Arduino Nicla Vision egy 22,86 × 22,86 mm-es gépi látás kártya, amelyet a STMicroelectronics STM32H747AII6 köré építettek — ez egy kétmagos SoC, amely egy 400 MHz-es Cortex‑M7-et és egy 200 MHz-es Cortex‑M4-et egyesít. Az OpenMV firmware teljes egészében az M7 magon fut. A kártya a mikrovezérlőt egy GC2145 2 MP-es színes CMOS érzékelővel, egy LSM6DSOX 6 tengelyes IMU-val, egy MP34DT06 MEMS mikrofonnal, egy VL53L1CB repülési idő alapú távolságmérővel, Wi‑Fi + Bluetooth LE 5.1 modullal, valamint egy akkumulátortöltővel / töltöttségmérővel párosítja.
A teljes adatlapért, fényképekért és méretekért lásd az Arduino Nicla Vision termékoldalt.
Kiemelt jellemzők¶
STMicroelectronics STM32H747AII6 kettős Cortex‑M7 (400 MHz) + Cortex‑M4 (200 MHz). Az OpenMV firmware kizárólag az M7 magon fut.
2 MB belső flash memória, valamint 16 MB külső QSPI flash memória (az alkalmazás + ROMFS számára).
1 MB belső SRAM.
Hardveres JPEG kódoló/dekódoló.
GC2145 2 MP-es színes CMOS érzékelő.
Beépített IMU (LSM6DSOX gyorsulásmérő + giroszkóp), MEMS mikrofon (MP34DT06JTR) és VL53L1CB repülési idő alapú távolságmérő (akár ~4 m-ig).
Wi‑Fi b/g/n (2,4 GHz) + Bluetooth LE 5.1 a Murata 1DX (CYW4343W) modulon keresztül — a mellékelt antennához egy beépített U.FL csatlakozóval kapcsolódik.
Nagy sebességű USB (480 Mb/s) a Micro USB-n keresztül, egy külső ULPI PHY-n (USB3320C) át.
13 felhasználói I/O láb az Arduino szélső csatlakozósorokon — négy digitális LPIO (
D0–D3), három 1,8 V-os analóg bemenet (A0–A2), azSCL/SDAI²C pár, valamint azSCLK/CIPO/COPI/CSSPI négyes.Akkumulátortámogatás — Li‑Po csatlakozó a hátoldalon, BQ-stílusú töltő és MAX17262 töltöttségmérő a belső PMIC buszon keresztül.
5 lábú ESLOV csatlakozó a hátoldalon a forrasztásmentes I²C bővítéshez.
Figyelem
A felhasználói digitális lábak alapértelmezetten 3,3 V-osak, de szoftveresen programozható szintillesztőkön (VDDIO_EXT) keresztül vannak vezetve, amelyek 1,8 V-ra is átkonfigurálhatók. Az analóg lábak (A0–A2) csak 1,8 V-osak — ezek megkerülik a szintillesztőket, és közvetlenül a mikrovezérlőhöz kapcsolódnak. Ha 3,3 V-ot vezetsz az A0–A2 lábakra, az károsítja a SoC-t.
Lábkiosztás¶
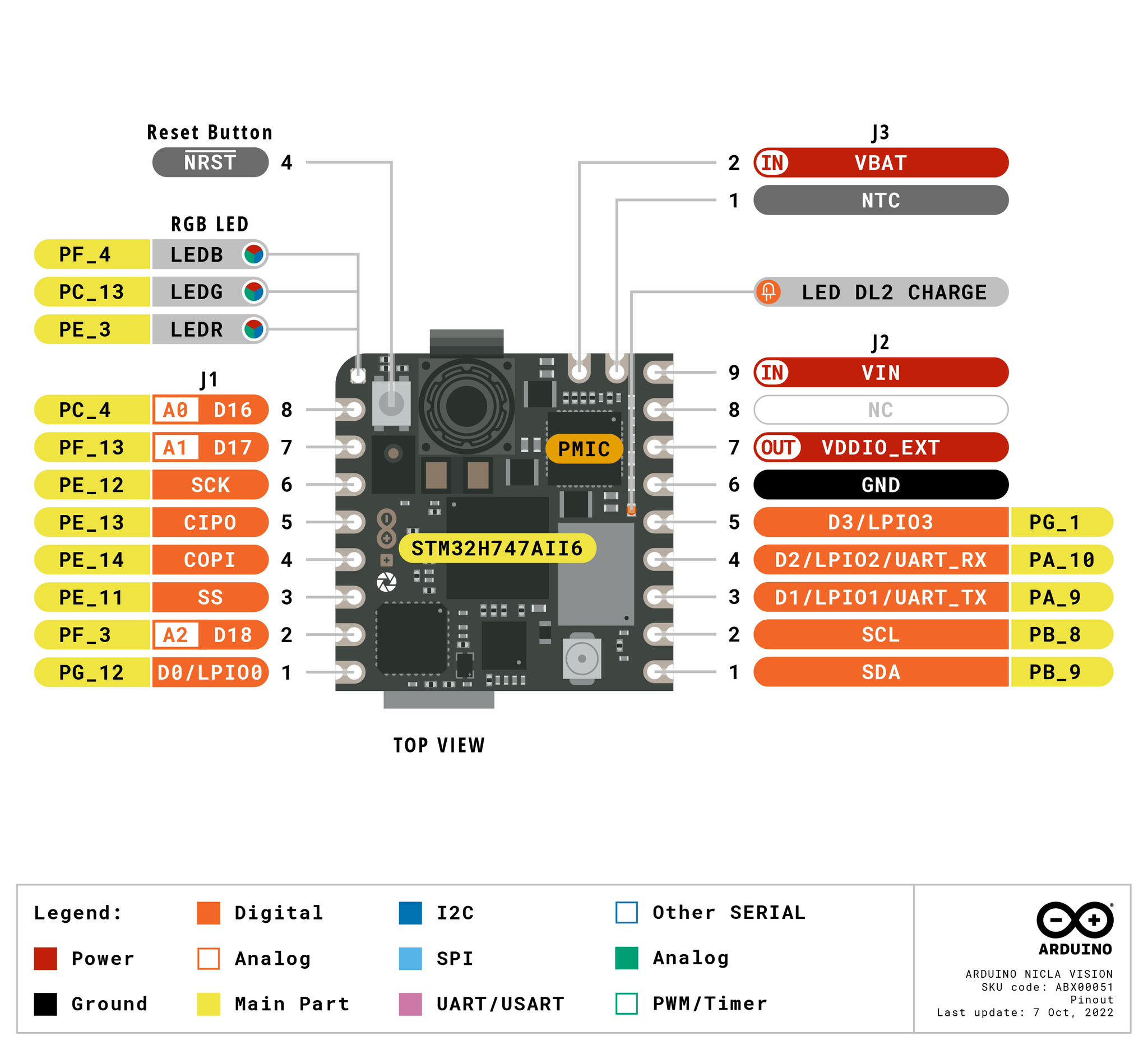
Lábkiosztási referencia¶
Tizenhárom felhasználói láb érhető el az Arduino szélső csatlakozósorokon (J1 és J2). További hibakeresési, helyreállítási és PMIC jelek a kártya hátoldalán lévő tesztpontokra vannak vezetve.
Láb neve |
Referencia |
Funkció |
|---|---|---|
D0 |
3,3 V |
GPIO / LPIO0 (J1‑1) |
D1 |
3,3 V |
LPUART1 TX / TIM1 CH2 / LPIO1 (J2‑3) |
D2 |
3,3 V |
LPUART1 RX / TIM1 CH3 / LPIO2 (J2‑4) |
D3 |
3,3 V |
GPIO / LPIO3 (J2‑5) |
A0 |
1,8 V |
ADC1 4. csatorna (J1‑8) |
A1 |
1,8 V |
ADC2 2. csatorna (J1‑7) |
A2 |
1,8 V |
ADC3 5. csatorna (J1‑2) |
SCL |
3,3 V |
I2C1 SCL / UART4 RX / TIM4 CH3 (J2‑2) |
SDA |
3,3 V |
I2C1 SDA / UART4 TX / TIM4 CH4 (J2‑1) |
SCLK |
3,3 V |
SPI4 SCK / TIM1 CH3N (J1‑6) |
CIPO |
3,3 V |
SPI4 MISO / TIM1 CH3 (J1‑5) |
COPI |
3,3 V |
SPI4 MOSI / TIM1 CH4 (J1‑4) |
CS |
3,3 V |
SPI4 NSS / TIM1 CH2 (J1‑3) |
RESET |
3,3 V |
húzd a GND-re (vagy nyomd meg a beépített kapcsolót) a kártya újraindításához |
LED_RED |
3,3 V |
RGB LED piros csatornája (aktív alacsony) |
LED_GREEN |
3,3 V |
RGB LED zöld csatornája (aktív alacsony) |
LED_BLUE |
3,3 V |
RGB LED kék csatornája (aktív alacsony) |
Megjegyzés
A D0–D3 és az SCLK/CIPO/COPI/CS a TXB0108 kétirányú szintillesztő mögött helyezkedik el — ez az alkatrész csak a push‑pull GPIO meghajtást támogatja, így a nyitott kollektoros (open‑drain) buszforgalom (pl. egy bitenként vezérelt 1‑Wire vagy I²C ezeken a lábakon) nem fog működni.
Az SCL/SDA egy külön NTS0304 szintillesztő mögött helyezkedik el, amely a push‑pull és az open‑drain meghajtást is támogatja, ezért működik ott az I²C 1.
Mindkét szintillesztő referenciája a VDDIO_EXT (alapértelmezetten 3,3 V a beépített PMIC-ből), és meghajtási erősségük egy közvetlen GPIO-hoz képest korlátozott — jelszintű, nem pedig teljesítményterhelésre tervezték őket.
Tápfeszültség lábak¶
Szélső csatlakozósor lábai:
VIN (J2‑9) — fő 3,6 – 5 V-os rendszer-tápsín. A PMIC innen kapja a bemenetét.
VDDIO_EXT (J2‑7) — a szintillesztő tápsín kimenete, 1,8 V vagy 3,3 V (alapértelmezetten 3,3 V). Ezzel táplálhatod az LPIO/SPI/I²C lábakra csatlakoztatott külső 1,8 V-os vagy 3,3 V-os perifériákat, hogy azonos logikai szinten kommunikáljanak a csatlakozósorokkal.
VBAT (J3‑2) — Li‑Po akkumulátor bemenet. A beépített PMIC a VIN-ről tölti a cellát, és a töltöttségi állapotot a töltöttségmérőn keresztül jelzi.
NTC (J3‑1) — opcionális Li‑Po termisztor bemenet.
GND (J2‑6) — közös föld.
NC (J2‑8) — nincs csatlakoztatva.
Tesztpontok a kártya hátoldalán:
+3V3 — fő 3,3 V-os tápsín.
D_P / D_N — USB nagy sebességű adatpár (a PHY után).
Az USB és az ESLOV csatlakozó egyaránt egy pár LM66100 ideális diódán (forrásonként egy) keresztül táplálja a VIN-t, így bármelyik tápforrás önállóan is meg tudja táplálni a kártyát, és a kettő soha nem hajtja vissza egymást. Ha kívülről hajtod meg a VIN-t a J2‑9-en, az élvez elsőbbséget — a diódák egyszerűen leállnak az USB / ESLOV felől, amint a külső tápsín magasabbra emelkedik.
A kártya tehát az alábbi útvonalak bármelyikén keresztül táplálható:
Micro USB — 5 V a VIN-be az USB-oldali ideális diódán keresztül.
ESLOV csatlakozó — akár 5 V a J5
VESLOVlábán, az ESLOV-oldali ideális diódán keresztül a VIN-be vezetve (lásd ESLOV csatlakozó).VIN láb (J2‑9) — közvetlenül egy szabályozott 3,6 – 5 V-os tápfeszültséggel hajtsd meg.
Li‑Po akkumulátor — csatlakoztasd a hátoldalon lévő J4 akkumulátorcsatlakozóhoz vagy a J3 / J2‑6 VBAT/GND/NTC pontjaihoz. Ne csatlakoztass egyszerre két akkumulátort.
ESLOV csatlakozó¶
A J5 a kártya hátoldalán egy 5 lábú Molex forrasztásmentes ESLOV csatlakozó:
Láb |
Név |
Funkció |
|---|---|---|
J5‑1 |
VESLOV |
tápbemenet (≤ 5 V) — egy LM66100 ideális diódán keresztül a |
J5‑2 |
INT |
külső megszakítás bemenet a |
J5‑3 |
SCL_EXT |
megosztva a J2 |
J5‑4 |
SDA_EXT |
megosztva a J2 |
J5‑5 |
GND |
közös föld |
Az ESLOV SCL_EXT/SDA_EXT és a J2 SCL/SDA lábai ugyanazok — egyetlen I²C 1 busz, amely két csatlakozón van kivezetve.
Javaslat
Használd a akkumulátor-élettartam becslőt annak modellezéséhez, hogy a Nicla Vision egy adott aktív / mélyalvás kitöltési tényező mellett mennyi ideig fut akkumulátorról.
Helyreállítási és hibakeresési lábak¶
RESET — egyszerre egy nyomógomb a kártya tetején és egy pont (J3‑4 / P5 tesztpont), amely a SoC NRST vonalához van kötve. Húzd a GND-re az újraindításhoz.
A Nicla Vision az Arduino szabványos dupla koppintásos újraindítását használja az Arduino rendszerbetöltőjébe való belépéshez — nyomd meg gyorsan kétszer az újraindító gombot, és a kártya DFU eszközként jelentkezik be. Az OpenMV IDE ezt a módot használja a firmware újraflashelésére.
Az STM32 SWD jelei a kártya hátoldalán, a két J2 csatlakozósor között lévő tesztpont-soron keresztül érhetők el. Forrassz beléjük egy 2,54 mm-es (100 mil) csatlakozósort egy ST‑LINK vagy J‑Link adapter csatlakoztatásához:
P1 / P2 — belső PMIC I²C busz a PF0 (SDA) és PF1 (SCL) lábakon. Ez a
machine.I2C(2)a Nicla Vision-ön, és a PMIC, a töltöttségmérő, valamint a ToF forgalmát viszi.P3 — TMS / SWDIO (PA13)
P4 — TCK / SWCLK (PA14)
P5 — NRST
P6 — TDO / SWO (PB3)
P7 — +1V8 tápsín (a SoC I/O tápellátása — egyben a megfelelő referencia a hibakereső adapter számára is).
P8 —
VOTP_PMIC— csak gyári programozáshoz. Csatlakoztatás nélkül kell hagyni.
Minden hibakeresési jel 1,8 V-os referenciájú — az STM32H747 I/O gyűrűje ezen a kártyán a +1V8 tápsínről működik. Csatlakoztatás előtt állítsd a hibakereső adaptert 1,8 V-os logikára.
Beépített perifériák¶
LED-ek¶
A Nicla Vision egyetlen felhasználói RGB LED-del rendelkezik, amely szoftveresen vezérelhető a machine.LED segítségével:
from machine import LED
LED("LED_RED").on()
LED("LED_GREEN").on()
LED("LED_BLUE").on()
A kártya oldalán lévő külön DL2 CHARGE LED közvetlenül a PMIC CHGB kimenetére van kötve — akkor világít, amikor egy Li‑Po akkumulátor töltődik az USB / ESLOV / VIN forrásról, és nem vezérelhető a felhasználó által.
Kamera érzékelő¶
A GC2145-öt a csi — kameraérzékelők modulon keresztül vezéreljük:
import csi
cam = csi.CSI()
cam.reset()
cam.pixformat(csi.RGB565)
cam.framesize(csi.QVGA)
cam.snapshot(time=2000) # let auto‑exposure settle
while True:
img = cam.snapshot()
Amikor kis képkockaméretet kérsz, a GC2145 illesztőprogram egy arányosan kis kiolvasási ablakot vág ki az érzékelőből — alapértelmezetten a kiolvasásról a kimenetre történő leskálázás aránya 3-szorosra van korlátozva a képkockasebesség fenntartása érdekében. A csi.IOCTL_SET_FOV_WIDE ezt a korlátot 5-szörösre emeli, ami azt jelenti, hogy az illesztőprogram az érzékelő szélesebb területéről olvas ki, amikor kis felbontásokat közvetít. Az eredmény egy észrevehetően szélesebb látómező a kis képkockaméreteknél, némi átviteli teljesítmény árán:
cam.ioctl(csi.IOCTL_SET_FOV_WIDE, True)
cam.ioctl(csi.IOCTL_GET_FOV_WIDE) # returns the current setting
M4 mag¶
A Cortex‑M4 mag az openamp modulon keresztül érhető el processzorok közötti kommunikációhoz. Az OpenMV firmware csak az M7-en fut; az M4-nek nincs saját MicroPython futtatókörnyezete, így a használata azt jelenti, hogy egy különálló C firmware-képet kell építeni, és azt a fájlrendszerből kell betölteni az openamp.RemoteProc segítségével. Egy előre elkészített példa firmware, amely egy virtuális UART végpontot valósít meg, elérhető az openamp_vuart tárolóban — kövesd a README-jét a vuart.elf felépítéséhez:
import openamp
import time
def ept_recv_callback(src_addr, data):
print("Received:", data.decode())
ept = openamp.Endpoint("vuart-channel", callback=ept_recv_callback)
rproc = openamp.RemoteProc("vuart.elf")
rproc.start()
count = 0
while True:
if ept.is_ready():
ept.send("Hello World %d!" % count, timeout=1000)
count += 1
time.sleep_ms(1000)
A gyakorlatban ezt a támogatást leginkább az openamp interfész demonstrációjaként érdemes kezelni, nem pedig egy működő kétmagos platformként — az M4 nem indítható újra az M7-től függetlenül, így az M4 leállítása a teljes rendszer újraindítását kényszeríti ki.
Mikrofon¶
A beépített MP34DT06JTR PDM mikrofon a audio — Audio modul modulon keresztül, az STM32 DFSDM perifériáján át rögzíthető. Minden puffer előjeles 16 bites PCM bytearray formában érkezik, készen arra, hogy DSP céljából a ulab/numpy modulba táplálják — például egy egyszerű hangerő-érzékelő:
import audio
from ulab import numpy as np
def loudness(pcmbuf):
samples = np.array(np.frombuffer(pcmbuf, dtype=np.int16), dtype=np.float)
rms = np.sqrt(np.mean(samples ** 2))
if rms > 10000:
print("Loud!", int(rms))
audio.init(channels=1, frequency=16000, gain_db=24)
audio.start_streaming(loudness)
while True:
pass
IMU¶
A beépített LSM6DSOX gyorsulásmérő + giroszkóp az imu — imu érzékelő modulon keresztül érhető el:
import imu
import time
while True:
print(imu.acceleration_mg()) # (x, y, z) in milli‑g
print(imu.angular_rate_mdps()) # (x, y, z) in milli‑deg/s
time.sleep_ms(100)
Az IMU egy dedikált belső SPI buszra (SPI5) van kötve, így nem ütközik a csatlakozósorokra kivezetett felhasználói SPI4-gyel.
Repülési idő alapú távolságmérő¶
A beépített ST VL53L1CB repülési idő alapú távolságmérő a belső PMIC I²C buszon (I²C 2) helyezkedik el. Használd a befagyasztott vl53l1x — VL53L1X ToF távolságérzékelő illesztőprogram illesztőprogramot akár ~4 m-ig terjedő távolságmérésekhez:
import time
from machine import I2C
import vl53l1x
bus = I2C(2) # internal bus (PMIC / fuel gauge / ToF)
tof = vl53l1x.VL53L1X(bus)
while True:
print("Distance:", tof.read(), "mm")
time.sleep_ms(100)
Akkumulátor töltöttségmérő¶
A Maxim MAX17262 ModelGauge m5 töltöttségmérő a Li‑Po akkumulátor feszültségét, áramát, hőmérsékletét és töltöttségi állapotát követi nyomon. Az I²C 2-n helyezkedik el a 0x36 címen.
A MAX17262 belső árammérővel rendelkezik, így az áramregiszter közvetlenül mikroamperben olvasható ki, külső Rsense tényező alkalmazása nélkül. A töltöttségmérő olvasása ártalmatlan — nincs hozzá szállított illesztőprogram, de a MAX17262 adatlapban dokumentált regiszterek közvetlenül kiolvashatók:
import time
import struct
from machine import I2C
FUEL_GAUGE = 0x36 # MAX17262
def read_reg(bus, addr, reg):
return struct.unpack("<H", bus.readfrom_mem(addr, reg, 2))[0]
def read_signed(bus, addr, reg):
v = read_reg(bus, addr, reg)
return v - 0x10000 if v & 0x8000 else v
bus = I2C(2)
while True:
# 0x05 RepCap — remaining capacity, raw × 0.5 mAh
rep_cap = read_reg(bus, FUEL_GAUGE, 0x05) * 0.5
# 0x06 RepSOC — state of charge, raw / 256 %
soc = read_reg(bus, FUEL_GAUGE, 0x06) / 256
# 0x08 Temp — die temperature, signed, raw / 256 °C
temp = read_signed(bus, FUEL_GAUGE, 0x08) / 256
# 0x09 VCell — battery voltage, raw × 78.125 µV
vcell = read_reg(bus, FUEL_GAUGE, 0x09) * 78.125 / 1_000_000
# 0x0A Current — signed, raw × 156.25 µA
current = read_signed(bus, FUEL_GAUGE, 0x0A) * 156.25 / 1000
# 0x0B AvgCurrent — averaged current
avg_curr = read_signed(bus, FUEL_GAUGE, 0x0B) * 156.25 / 1000
# 0x10 FullCapRep — learned full capacity, raw × 0.5 mAh
full_cap = read_reg(bus, FUEL_GAUGE, 0x10) * 0.5
# 0x11 TTE — time-to-empty (valid while discharging), raw × 5.625 s
tte_s = read_reg(bus, FUEL_GAUGE, 0x11) * 5.625
# 0x20 TTF — time-to-full (valid while charging), raw × 5.625 s
ttf_s = read_reg(bus, FUEL_GAUGE, 0x20) * 5.625
# 0x17 Cycles — charge-cycle counter, 1% per LSB
cycles = read_reg(bus, FUEL_GAUGE, 0x17) / 100
print("V: %.3f V" % vcell)
print("Capacity: %.1f / %.1f mAh (%.1f %%)" % (rep_cap, full_cap, soc))
print("Temp: %.1f C" % temp)
print("Current: %.1f mA (avg %.1f mA)" % (current, avg_curr))
print("TTE: %.0f s TTF: %.0f s" % (tte_s, ttf_s))
print("Cycles: %.2f" % cycles)
print()
time.sleep_ms(1000)
A Current előjeles kettes komplemens: pozitív töltés közben, negatív kisütés közben. A TTE csak akkor értelmes, ha az áram negatív; a TTF csak akkor, ha az áram pozitív.
Energiagazdálkodási IC¶
Az NXP MC34PF1550A0EP PMIC kezeli a Nicla Vision összes szabályozóját — a +3V3 fő tápsínt, a +1V8 SoC mag / I/O tápsínt, a VDDIO_EXT-et a szintillesztőkhöz, valamint a Li‑Po töltőt. Az I²C 2-n helyezkedik el a 0x08 címen.
Figyelem
A PMIC regiszterek olvasása rendben van; az írásuk veszélyes. Egy buck szabályozó vagy töltőbeállítás hibás konfigurálása maradandóan károsíthatja a kártyát, az akkumulátort, vagy mindkettőt. Kezeld a PMIC-et csak olvashatóként, hacsak nem tudod pontosan, mit csinálsz.
A leghasznosabb dolog, amit a PMIC elárul, és amit a töltöttségmérő nem tud, az a töltő állapotgépe — hogy a kártya éppen USB / ESLOV / VIN forrásról fut-e, a Li‑Po a töltési ciklus mely szakaszában van, és hogy a töltő termikus vagy watchdog hibában van-e. A töltő regiszterei a PF1550 fő I²C címterében a 0x80 eltolásnál helyezkednek el (lásd a PF1550 adatlap 22.2. fejezetét), így például a 0x04 töltőcímen lévő CHG_INT_OK a 0x84 PMIC regiszterből olvasható ki:
import time
from machine import I2C
PMIC = 0x08
# Charger state machine (low nibble of CHG_SNS, register 0x87)
CHG_STATES = {
0x0: "precharge",
0x1: "fast charge (constant current)",
0x2: "fast charge (constant voltage)",
0x3: "end of charge",
0x4: "done",
0x6: "timer fault",
0x7: "thermistor suspend",
0x8: "off — input invalid or charger disabled",
0x9: "battery overvoltage",
0xA: "thermal shutdown",
0xC: "linear mode (not charging)",
}
bus = I2C(2)
while True:
# 0x84 CHG_INT_OK — single-bit indicators
ok = bus.readfrom_mem(PMIC, 0x84, 1)[0]
vbus_ok = bool(ok & (1 << 5)) # bit 5 — VBUS valid (USB/ESLOV/VIN)
bat_ok = bool(ok & (1 << 2)) # bit 2 — battery OK
chg_ok = bool(ok & (1 << 3)) # bit 3 — charger actively charging
thm_ok = bool(ok & (1 << 7)) # bit 7 — thermistor in normal range
# 0x87 CHG_SNS — charger state + thermal regulation flag
chg_sns = bus.readfrom_mem(PMIC, 0x87, 1)[0]
state = CHG_STATES.get(chg_sns & 0x0F, "reserved")
treg = bool(chg_sns & (1 << 7)) # thermal regulation active
print("VBUS valid: ", vbus_ok)
print("battery OK: ", bat_ok)
print("charger active: ", chg_ok)
print("thermistor normal: ", thm_ok)
print("thermal reg active: ", treg)
print("state: ", state)
print()
time.sleep_ms(1000)
Más, az adatlapban megtekintésre érdemes, csak olvasható regiszterek (mind a 0x80 töltő-eltolásnál): 0x80 CHG_INT (rögzített töltő-megszakítások — hibajelzők), 0x86 VBUS_SNS (a több bites VBUS állapot, beleértve az OVLO / UVLO / DPM értékeket), valamint 0x88 BATT_SNS (akkumulátor jelenléte és túláram állapota).
Wi‑Fi¶
A beépített Murata 1DX (CYW4343W) a network — hálózati konfiguráció modulon keresztül érhető el állomás (station) interfészként. Csatlakoztasd a mellékelt antennát a beépített U.FL csatlakozóhoz, mielőtt elindítanád a rádiót:
import network, time
wlan = network.WLAN(network.STA_IF)
wlan.active(True)
wlan.connect("ssid", "password")
while not wlan.isconnected():
time.sleep(1)
print("Wi‑Fi IP:", wlan.ipconfig("addr4")[0])
Bluetooth¶
Ugyanaz a Murata 1DX Bluetooth LE 5.1-et is biztosít. Használd az aioble — Aszinkron BLE modult az asyncio-barát BLE-hez — például hirdesd magad perifériaként, és várd, hogy egy központi egység csatlakozzon:
import asyncio
import aioble
async def run():
while True:
conn = await aioble.advertise(250_000, name="Nicla-Vision")
print("Connected:", conn.device)
await conn.disconnected()
asyncio.run(run())
Busz referencia¶
GPIO¶
Használd a machine.Pin osztályt bármelyik feliratozott láb olvasásához vagy meghajtásához. A kimenetek 3,3 V-os CMOS szintűek (alapértelmezetten VDDIO_EXT), és a szintillesztők a lábankénti meghajtási erősséget néhány milliamperre korlátozzák — jelszintű, nem pedig teljesítményterhelésre tervezték őket.
from machine import Pin
out = Pin("D0", Pin.OUT)
out.on()
out.off()
out.value(1)
inp = Pin("D1", Pin.IN, Pin.PULL_UP)
print(inp.value())
Bármelyik bemeneti láb megszakítást is kiválthat él-átmeneteknél:
def handler(pin):
print("triggered:", pin)
Pin("D1", Pin.IN, Pin.PULL_UP).irq(
handler, Pin.IRQ_FALLING | Pin.IRQ_RISING,
)
UART¶
Busz |
TX |
RX |
|---|---|---|
UART4 |
SDA |
SCL |
from machine import UART
uart = UART(4, baudrate=115200)
uart.write("hello")
uart.read(5)
Megjegyzés
Az UART4 megosztja a lábait az I²C 1-gyel — ugyanazok az SDA/SCL pontok viszik mindkét buszt. Ezeken a lábakon UART-ot vagy I²C-t válassz, nem mindkettőt.
A D1/D2 felirat UART_TX/UART_RX-et is jelez, de ebben a firmware-ben ezek a lábak az LPUART1-hez vannak vezetve, nem a machine.UART-hoz. Maga a machine.UART(1) a chipen lévő Bluetooth vezérlő számára van fenntartva, és nem érhető el a csatlakozósorokon.
I²C¶
Busz |
SCL |
SDA |
|---|---|---|
I2C1 |
SCL |
SDA |
from machine import I2C
i2c = I2C(1, freq=400_000)
i2c.scan()
i2c.writeto(0x76, b"hi")
A J2 SCL/SDA pontjai és az ESLOV csatlakozó SCL_EXT/SDA_EXT lábai ugyanarra az I²C 1 buszra kapcsolódnak — lásd a fenti ESLOV csatlakozó részt az ESLOV lábkiosztásáért.
Ugyanaz a hardver cél (slave) módban is használható a machine.I2CTarget segítségével, hogy egy memóriaterületet egy másik I²C vezérlő számára elérhetővé tegyen:
from machine import I2CTarget
buf = bytearray(32)
target = I2CTarget(1, addr=0x42, mem=buf)
SPI¶
Busz |
MOSI |
MISO |
SCK |
CS |
|---|---|---|---|---|
SPI4 |
COPI |
CIPO |
SCLK |
CS |
from machine import SPI
from machine import Pin
spi = SPI(4, baudrate=10_000_000)
cs = Pin("CS", Pin.OUT, value=1) # CS is not driven by the SPI peripheral
cs.value(0)
spi.write(b"hello")
cs.value(1)
ADC¶
A Nicla Vision három 12 bites ADC csatornát vezet ki az A0, A1 és A2 lábakon. Mindhárom 1,8 V-os referenciájú — a read_u16 0–65535 értéket ad vissza a lábon mért 0–1,8 V tartományban:
from machine import ADC
import time
adc = ADC("A0")
while True:
voltage = adc.read_u16() * 1.8 / 65535
print(voltage)
time.sleep_ms(100)
Figyelem
A Nicla Vision ADC bemenetei 1,8 V-os referenciájúak (és nincs szintillesztő a SoC előtt). Egy 3,3 V-os jel rávezetése telíti a konvertert, és károsíthatja a lábat — a magasabb feszültségeket kívülről oszd le.
PWM¶
Láb |
Időzítő / csatorna |
|---|---|
D1 |
TIM1 CH2 |
D2 |
TIM1 CH3 |
SCL |
TIM4 CH3, TIM16 CH1 |
SDA |
TIM4 CH4, TIM17 CH1 |
SCLK |
TIM1 CH3N |
CIPO |
TIM1 CH3 |
COPI |
TIM1 CH4 |
CS |
TIM1 CH2 |
Bármelyiket meghajthatod a machine.PWM segítségével:
from machine import Pin, PWM
pwm = PWM(Pin("D1"), freq=1_000, duty_u16=32768)
Megjegyzés
Több láb osztozik a TIM1 csatornáin:
A TIM1 CH2 a
D1és aCSlábon van.A TIM1 CH3 a
D2és aCIPOlábon van; azSCLKugyanannak a csatornának az invertált komplementerét (TIM1 CH3N) adja ki.A TIM1 CH4 kizárólag a
COPIlábon van.
Időzítő-csatornánként egy fogyasztót válassz. Az SPI négyes lábai (SCLK/CIPO/COPI/CS) szintén nem hajthatók meg PWM-mel, amíg a machine.SPI(4) használja őket.
Szoftveresen, bitenként vezérelt buszok¶
A machine.SoftI2C és a machine.SoftSPI bármelyik GPIO-n működik, ha egy extra buszra van szükséged.
Hőkamera érzékelő (külső)¶
A firmware tartalmazza a fir — hőérzékelő-meghajtó (fir == far infrared, távoli infravörös) illesztőprogramot a kívülről bekötött hőkamerákhoz:
MLX90621 — 16 × 4 IR mátrix
MLX90640 — 32 × 24 IR mátrix
MLX90641 — 16 × 12 IR mátrix
AMG8833 — 8 × 8 IR mátrix
Kösd a modult a kártya I²C buszára, és olvass be képkockákat a fir.init() + fir.snapshot() segítségével:
import time
import image
import fir
fir.init() # auto‑detects the sensor
clock = time.clock()
while True:
clock.tick()
try:
img = fir.snapshot(x_scale=5, y_scale=5,
color_palette=image.PALETTE_IRONBOW,
hint=image.BICUBIC,
copy_to_fb=True)
except OSError:
continue
print(clock.fps())
A fir illesztőprogram csak az I²C 1-en kommunikál az érzékelővel — kösd a modult a feliratozott SCL / SDA pontokhoz.
Időzítés¶
time¶
A time modul a blokkoló késleltetéseket, a monoton ütemjeleket és az eltelt idő mérését fedi le:
import time
time.sleep(1) # seconds
time.sleep_ms(500)
time.sleep_us(10)
start = time.ticks_ms()
# ...do work...
elapsed = time.ticks_diff(time.ticks_ms(), start)
Virtuális időzítők¶
A machine.Timer periodikus vagy egyszeri visszahívásokat ütemez egy hardveres időzítő-hely lefoglalása nélkül. Add meg az id-ként a -1 értéket egy virtuális (szoftveres) időzítő használatához:
from machine import Timer
one_shot = Timer(-1)
one_shot.init(period=5_000, mode=Timer.ONE_SHOT,
callback=lambda t: print("once"))
periodic = Timer(-1)
periodic.init(period=2_000, mode=Timer.PERIODIC,
callback=lambda t: print("tick"))
A periódusértékek ezredmásodpercben vannak megadva. Hívd meg a deinit() metódust a leállításhoz és a hely felszabadításához.
Valós idejű óra¶
A machine.RTC az újraindítások között is megtartja a faliórai időt:
from machine import RTC
rtc = RTC()
rtc.datetime((2026, 4, 30, 4, 12, 0, 0, 0)) # Y, M, D, weekday, h, m, s, subsec
print(rtc.datetime())
Watchdog¶
A machine.WDT újraindítja a kártyát, ha az alkalmazás lefagy. Az elindítása után nem állítható le és nem konfigurálható át — etesd rendszeresen a fő ciklusodon belül:
from machine import WDT
wdt = WDT(timeout=5_000) # 5 second window
while True:
# ...do work...
wdt.feed()
Indítási és futásidejű információk¶
Firmware frissítés (DFU)¶
A Nicla Vision az Arduino szabványos dupla koppintásos újraindítását használja az Arduino rendszerbetöltőjébe való belépéshez. Nyomd meg gyorsan kétszer az újraindító gombot — a kártya DFU eszközként jelentkezik be újra az USB-n, és az OpenMV IDE új firmware-képet flashelhet.
Egy futó szkript igény szerint újra beléphet a rendszerbetöltőbe a machine.bootloader() meghívásával:
import machine
machine.bootloader()
Fájlrendszer és indítási sorrend¶
A Nicla Vision firmware indításkor legfeljebb két fájlrendszert csatol fel:
Belső flash memória — mindig a
/flashalá csatolva. Alapértelmezetten amain.pyés aREADME.txtfájlokat tartalmazza; a legelső indításkor jön létre.ROMFS — csak olvasható, memóriába leképezett fájlrendszer a
/romalatt, amelyet a MicroPython indításkor automatikusan felcsatol.
A felcsatolás után a munkakönyvtár a /flash lesz. Az értelmező ezután ebből a könyvtárból futtatja a szkripteket:
A
boot.pyminden szoft újraindításkor lefut (hidegindítás,Ctrl‑Da REPL-ből, vagy amikor a futó szkript visszatér).A
main.pycsak hidegindításkor fut le, közvetlenül aboot.pyután. A további szoft újraindítások újra lefuttatják aboot.py-t, de egyből a REPL-re ugranak — amain.pyújrafuttatásához teljesen újra kell indítanod a kártyát.
A frissen flashelt kártyán szállított alapértelmezett main.py csak villogtatja a felhasználói RGB LED kék csatornáját szívverésként (két rövid felvillanás, rövid szünet), így anélkül is megállapíthatod, hogy a firmware tisztán elindult, hogy bármilyen hosztot csatlakoztatnál.
A sys.path ki van bővítve mindkét fájlrendszerrel és azok lib/ alkönyvtáraival, így az importálható modulok a /flash/lib vagy a /rom/lib alatt helyezkedhetnek el.
USB-n keresztül csatlakoztatva a /flash USB háttértárolóként is megjelenik a hoszton, lehetővé téve, hogy közvetlenül szerkeszd a boot.py, main.py és bármely más fájlt. A kamera újraindítása előtt dobd le a meghajtót, hogy a hoszt kiírja a gyorsítótárazott írásokat.
Megjegyzés
Mivel az operációs rendszer passzív blokk-eszközként kezeli a meghajtót, a kamerán futó kód által létrehozott vagy módosított fájlok addig nem jelennek meg, amíg a hoszt újra fel nem csatolja a meghajtót. Ha az operációs rendszer és a kamera egyszerre írja ugyanazt a fájlrendszert, az operációs rendszer győz, és felülírja a kamera által végzett módosításokat. A szkript által visszaírt adatokhoz használd az SD kártyát, és csatold újra, mielőtt ezeket a fájlokat a hosztról olvasnád.
Megjegyzés
A felhasználói RGB LED piros csatornája röviden felvillanhat, miközben a hoszt az USB háttértároló meghajtóról olvas vagy arra ír — ez egy firmware által vezérelt aktivitásjelző, nem hiba.
Tárolóméretek¶
A Nicla Vision a következőkkel kerül szállításra:
/flash— 11 MB FAT fájlrendszer, írható/olvasható./rom— 4 MB csak olvasható, memóriába leképezett ROMFS, amelyet olyan szkriptek és ML modellek szállítására használnak, amelyek profitálnak a zéró-másolatú mmap hozzáférésből.
Hard fault jelző¶
Ha a felhasználói RGB LED gyorsan végigciklázik az összes színen — elég gyorsan ahhoz, hogy inkább villódzó fehér LED-nek tűnjön, mint különálló árnyalatoknak —, akkor a firmware egy helyrehozhatatlan hard faultba ütközött. A helyreállításhoz flasheld újra a firmware-t; ha az újraflashelés nem segít, lehet, hogy a kártya fizikailag károsodott.
Szoftverkönyvtárak¶
A modulok teljes listájáért lásd a könyvtárindexet — beleértve azt is, mely modulok egyediek a Nicla Vision build-ben.