Arduino Giga R1 WiFi¶
Arduino Giga R1 WiFi è una scheda da 101 × 53 mm in formato Mega costruita attorno allo STMicroelectronics STM32H747XI, un SoC dual-core che combina un Cortex-M7 a 480 MHz con un Cortex-M4 a 240 MHz. Il firmware OpenMV viene eseguito interamente sul core M7. La Giga aggiunge al consueto layout degli header Arduino Mega un connettore flex per camera Arducam a 22 pin, un connettore MIPI-DSI per l”Arduino Giga Display Shield e un jack audio stereo da 3,5 mm.
Per il datasheet completo, le foto e le dimensioni, consultare la pagina prodotto di Arduino Giga R1 WiFi.
Caratteristiche principali¶
STMicroelectronics STM32H747XI dual Cortex-M7 (480 MHz) + Cortex-M4 (240 MHz). Il firmware OpenMV viene eseguito solo sul core M7; il core M4 è esposto tramite openamp per la comunicazione inter-processore.
8 MB di SDRAM esterna più 2 MB di flash interna e 16 MB di flash QSPI esterna.
Codificatore/decodificatore JPEG hardware.
Connettore flex per camera compatibile Arducam a 22 pin (
J6) — supporto driver per i moduli sensore OV5640 (5MP), OV7670, GC2145, HM01B0 e HM0360.Connettore display MIPI-DSI (
J5) per l”Arduino Giga Display Shield (pannello touch capacitivo 480×800) più un motore display LTDC RGB per carrier avanzati.Jack audio da 3,5 mm con line-out stereo e ingresso microfono.
Wi-Fi b/g/n (2,4 GHz) + Bluetooth LE 5.1 tramite il modulo Murata 1DX (CYW4343W) — si collega all’antenna fornita tramite un connettore U.FL integrato.
USB-C (full-speed) per alimentazione / seriale / programmazione.
I/O utente sugli header in stile Mega —
D0–D75(digitali),A0–A11(analogici),DAC0/DAC1(uscite DAC),CAN_RX/CAN_TX(FDCAN2) e la coppia I²CSDA1/SCL1della fila interna. Un header SPI1 a 6 pin separato sul lato frontale della scheda esponeCIPO/COPI/SCK(D89/D90/D91).JTAG / SWD esposti sull’header di debug sul lato superiore per il debug avanzato.
Pinout¶
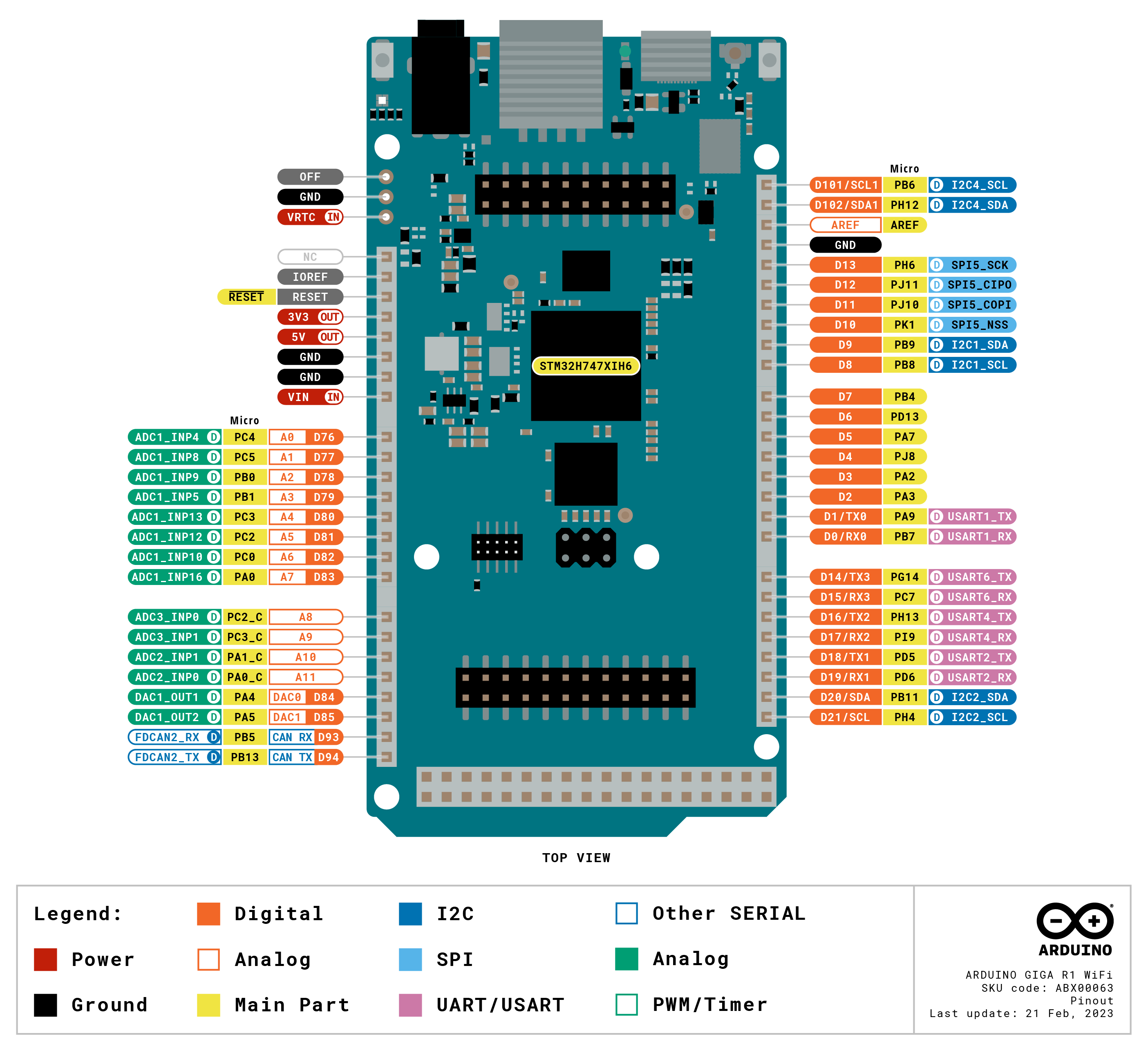
Riferimento dei pin¶
Gli header in stile Arduino Mega espongono 76 pin digitali (D0–D75), 12 pin analogici (A0–A11), due uscite DAC (DAC0/DAC1), una coppia I²C secondaria (SDA1/SCL1) e una coppia FDCAN2 (CAN_RX/CAN_TX). Un header SPI1 a 6 pin separato sul lato frontale della scheda espone CIPO/COPI/SCK (D89/D90/D91).
Nome del pin |
Riferimento |
Funzione |
|---|---|---|
D0 |
3,3 V |
USART1 RX (Serial1) / TIM4 CH2 |
D1 |
3,3 V |
USART1 TX (Serial1) / TIM1 CH2 |
D2 |
3,3 V |
TIM2 CH4 / TIM5 CH4 / USART2 RX |
D3 |
3,3 V |
TIM2 CH3 / TIM5 CH3 / USART2 TX |
D4 |
3,3 V |
TIM8 CH1 / UART8 TX |
D5 |
3,3 V |
TIM3 CH2 / SPI1 MOSI / SPI6 MOSI |
D6 |
3,3 V |
TIM4 CH2 |
D7 |
3,3 V |
TIM3 CH1 / SPI1 MISO / SPI3 MISO / SPI6 MISO |
D8 |
3,3 V |
TIM4 CH3 / I2C1 SCL / I2C4 SCL / UART4 RX |
D9 |
3,3 V |
TIM4 CH4 / I2C1 SDA / I2C4 SDA / UART4 TX |
D10 |
3,3 V |
TIM1 CH1 / TIM8 CH3N |
D11 |
3,3 V |
TIM8 CH2 / SPI5 MOSI |
D12 |
3,3 V |
TIM8 CH2N / SPI5 MISO |
D13 |
3,3 V |
TIM12 CH1 / SPI5 SCK |
D14 |
3,3 V |
USART6 TX (Serial2) / SPI6 MOSI |
D15 |
3,3 V |
USART6 RX (Serial2) / TIM3 CH2 / TIM8 CH2 |
D16 |
3,3 V |
UART4 TX (Serial3) / TIM8 CH1N |
D17 |
3,3 V |
UART4 RX (Serial3) |
D18 |
3,3 V |
USART2 TX (Serial4) |
D19 |
3,3 V |
USART2 RX (Serial4) / SPI3 MOSI |
D20 |
3,3 V |
I2C2 SDA / TIM2 CH4 / USART3 RX |
D21 |
3,3 V |
I2C2 SCL |
D22 |
3,3 V |
GPIO |
D23 |
3,3 V |
GPIO / SPI6 SCK |
D24 |
3,3 V |
GPIO / SPI6 MISO |
D25 |
3,3 V |
GPIO |
D26 |
3,3 V |
GPIO |
D27 |
3,3 V |
GPIO |
D28 |
3,3 V |
GPIO |
D29 |
3,3 V |
GPIO |
D30 |
3,3 V |
GPIO |
D31 |
3,3 V |
GPIO |
D32 |
3,3 V |
GPIO |
D33 |
3,3 V |
GPIO |
D34 |
3,3 V |
GPIO |
D35 |
3,3 V |
GPIO |
D36 |
3,3 V |
GPIO |
D37 |
3,3 V |
TIM8 CH2 |
D38 |
3,3 V |
TIM8 CH2N |
D39 |
3,3 V |
GPIO |
D40 |
3,3 V |
TIM15 CH2 / SPI4 MOSI |
D41 |
3,3 V |
GPIO |
D42 |
3,3 V |
GPIO |
D43 |
3,3 V |
GPIO |
D44 |
3,3 V |
GPIO |
D45 |
3,3 V |
GPIO |
D46 |
3,3 V |
TIM8 CH3N |
D47 |
3,3 V |
SPI3 MOSI |
D48 |
3,3 V |
TIM8 CH3 / SPI5 SCK |
D49 |
3,3 V |
GPIO |
D50 |
3,3 V |
GPIO |
D51 |
3,3 V |
TIM15 CH1 / SPI4 MISO |
D52 |
3,3 V |
GPIO |
D53 |
3,3 V |
GPIO |
D54 |
3,3 V |
TIM8 CH1 (camera DCMI VSYNC) |
D55 |
3,3 V |
I2C3 SDA (camera DCMI HSYNC) |
D56 |
3,3 V |
TIM3 CH1 / TIM13 CH1 (camera DCMI PXCLK) |
D57 |
3,3 V |
TIM8 CH1N / UART8 RX (clock master della camera — TIM1 CH3) |
D58 |
3,3 V |
TIM8 CH3 (camera DCMI D7) |
D59 |
3,3 V |
TIM8 CH2 (camera DCMI D6) |
D60 |
3,3 V |
GPIO (camera DCMI D5) |
D61 |
3,3 V |
TIM8 CH2N / UART4 RX (camera DCMI D4) |
D62 |
3,3 V |
SPI1 SCK (camera DCMI D3) |
D63 |
3,3 V |
TIM5 CH2 / I2C4 SCL (I²C del display) |
D64 |
3,3 V |
TIM5 CH1 (camera DCMI D1) |
D65 |
3,3 V |
TIM12 CH2 (camera DCMI D0) |
D66 |
3,3 V |
GPIO (reset della camera — riservato quando la camera è attiva) |
D67 |
3,3 V |
GPIO (power-down della camera — riservato quando la camera è attiva) |
D68 |
3,3 V |
TIM3 CH1 / TIM8 CH1 / USART6 TX (Display Shield DSI RESET) |
D69 |
3,3 V |
TIM5 CH4 (Display Shield DSI TE) |
D70 |
3,3 V |
SPI2 SCK |
D71 |
3,3 V |
TIM8 CH4 / SPI2 MISO |
D72 |
3,3 V |
SPI2 MOSI |
D73 |
3,3 V |
ADC123 IN11 (dati microfono DFSDM Display Shield) |
D74 |
3,3 V |
GPIO (retroilluminazione display — riservato dalla Giga Display Shield) |
D75 |
3,3 V |
SPI2 SCK (clock microfono DFSDM Display Shield) |
A0 / D76 |
3,3 V |
ADC12 IN4 |
A1 / D77 |
3,3 V |
ADC12 IN8 |
A2 / D78 |
3,3 V |
ADC12 IN9 / TIM3 CH3 / TIM8 CH2N |
A3 / D79 |
3,3 V |
ADC12 IN5 / TIM3 CH4 / TIM8 CH3N |
A4 / D80 |
3,3 V |
ADC12 IN13 / SPI2 MOSI |
A5 / D81 |
3,3 V |
ADC123 IN12 / SPI2 MISO |
A6 / D82 |
3,3 V |
ADC123 IN10 |
A7 / D83 |
3,3 V |
ADC1 IN16 / TIM2 CH1 / TIM5 CH1 (ingresso microfono jack audio) |
A8 |
3,3 V |
ADC3 IN0 (solo analogico) |
A9 |
3,3 V |
ADC3 IN1 (solo analogico) |
A10 |
3,3 V |
ADC12 IN1 (solo analogico) |
A11 |
3,3 V |
ADC12 IN0 (solo analogico) |
DAC0 / A12 / D84 |
3,3 V |
DAC1 OUT1 / ADC12 IN18 (line-out L jack audio) |
DAC1 / A13 / D85 |
3,3 V |
DAC1 OUT2 / TIM2 CH1 / SPI1 SCK / ADC12 IN19 (line-out R jack audio) |
D89 |
3,3 V |
SPI1 MISO ( |
D90 |
3,3 V |
SPI1 MOSI ( |
D91 |
3,3 V |
SPI1 SCK ( |
CAN_RX / D93 |
3,3 V |
FDCAN2 RX / TIM3 CH2 / UART5 RX |
CAN_TX / D94 |
3,3 V |
FDCAN2 TX / SPI2 SCK / UART5 TX |
SDA1 / D102 |
3,3 V |
I2C4 SDA (bus touch del display / controllo camera) |
SCL1 / D101 |
3,3 V |
I2C4 SCL (bus touch del display / controllo camera) |
RESET |
3,3 V |
premere il pulsante RESET integrato o collegare a GND per resettare |
LED_RED |
3,3 V |
canale rosso del LED RGB (attivo basso) |
LED_GREEN |
3,3 V |
canale verde del LED RGB (attivo basso) |
LED_BLUE |
3,3 V |
canale blu del LED RGB (attivo basso) |
Nota
I pad A8–A11 sono solo analogici sui pin _C dello STM32H747 — non hanno funzione GPIO e possono essere letti soltanto tramite l’ADC.
Pin di alimentazione¶
Pin dell’header Mega:
VIN — ingresso 6–32 V. Alimenta la scheda attraverso il regolatore buck integrato.
+5V — linea a 5 V alimentata da USB tramite un diodo o dal regolatore buck integrato.
+3V3 — linea principale a 3,3 V.
IOREF — riflette la tensione di I/O della scheda (3,3 V).
AREF — riferimento di tensione analogico per i pin ADC. Per impostazione predefinita è 3,3 V; pilotarlo esternamente per usare un riferimento diverso.
OFF — collegare a GND per spegnere la linea a +3,3 V e arrestare il sistema.
VRTC — ingresso per batteria a bottone da 3,0 V (3,3 V max) che mantiene in funzione l’RTC integrato mentre il resto della scheda è spento.
GND — massa comune.
La Giga R1 può essere alimentata attraverso una qualsiasi di queste vie:
USB-C — fornisce 5 V al regolatore buck integrato.
Pin VIN — fornire direttamente un’alimentazione regolata da 6–32 V.
Suggerimento
Utilizzare lo stimatore della durata della batteria per modellare quanto a lungo la Giga R1 funzionerà a batteria per un dato duty cycle attivo / deep-sleep.
Pin di recupero e debug¶
RESET — sia un pin esposto sull’header di alimentazione sia un pulsante momentaneo sulla parte superiore della scheda, collegato alla linea NRST del SoC. Collegare a GND o premere il pulsante per resettare.
La Giga R1 utilizza il double-tap reset standard di Arduino per entrare nel bootloader di Arduino. Premere rapidamente il pulsante RESET due volte — la scheda si rienumera su USB come dispositivo DFU e OpenMV IDE può flashare una nuova immagine firmware.
Se il bootloader manca completamente, tenere premuto il pulsante BOOT0 mentre si preme RESET per forzare il SoC nella modalità bootloader ROM.
I segnali SWD dello STM32 sono esposti sull”header Cortex Debug a 10 pin con passo 1,27 mm sul lato frontale della scheda. Collegarli tramite un SEGGER J-Link, ST-Link o qualsiasi sonda ARM JTAG/SWD standard. Tutti i segnali di debug sono riferiti a 3,3 V.
Periferiche integrate¶
LED¶
La Giga R1 ha un unico LED RGB utente, controllabile via software tramite machine.LED
from machine import LED
LED("LED_RED").on()
LED("LED_GREEN").on()
LED("LED_BLUE").on()
Un LED power separato sulla scheda si accende ogni volta che la linea a +3,3 V è attiva e non è controllabile dall’utente.
Connettore camera (J6)¶
J6 è un connettore flex per camera compatibile Arducam a 22 pin. Collegare uno qualsiasi dei moduli sensore supportati e il firmware li rileva automaticamente tramite il modulo csi — sensori camera
import csi
cam = csi.CSI()
cam.reset()
cam.pixformat(csi.RGB565)
cam.framesize(csi.QVGA)
cam.snapshot(time=2000) # let auto‑exposure settle
while True:
img = cam.snapshot()
Sensori supportati:
OV5640 — 5 MP a colori, fino a QSXGA (2592 × 1944).
OV7670 — 0,3 MP a colori, fino a VGA (640 × 480).
GC2145 — 2 MP a colori, fino a UXGA (1600 × 1200).
HM01B0 — monocromatico 320 × 320.
HM0360 — monocromatico VGA (640 × 480).
Avvertimento
Mentre la camera è inizializzata, i seguenti pin dell’header Mega sono riservati dal firmware e non possono essere usati:
Pin |
Motivo |
|---|---|
|
Segnali dati DCMI + sync sul connettore flex della camera |
|
TIM1 CH3 — clock master della camera |
|
GPIO di reset della camera |
|
GPIO di power-down della camera |
|
I²C 4 — condiviso con la camera; il bus è utilizzabile ma evitare l’indirizzo I²C del sensore |
Machine learning¶
ml — Machine Learning esegue modelli TFLite quantizzati sul Cortex-M7 con kernel CMSIS-NN — abbastanza veloci per rilevatori compatti a pochi frame al secondo. I modelli sul filesystem di sola lettura /rom vengono caricati direttamente dalla flash senza copia in RAM. Ecco un rilevatore BlazeFace 128×128 che sovrappone il volto rilevato e i suoi sei landmark su ogni frame:
import csi
import time
import ml
from ml.postprocessing.mediapipe import BlazeFace
# Initialize the sensor.
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.VGA)
csi0.window((400, 400))
# Load built-in face detection model
model = ml.Model("/rom/blazeface_front_128.tflite", postprocess=BlazeFace(threshold=0.4))
print(model)
clock = time.clock()
while True:
clock.tick()
img = csi0.snapshot()
for r, score, keypoints in model.predict([img]):
ml.utils.draw_predictions(img, [r], ("face",), ((0, 0, 255),), format=None)
ml.utils.draw_keypoints(img, keypoints, color=(255, 0, 0))
print(clock.fps(), "fps")
Core M4¶
Il core Cortex-M4 è esposto tramite openamp per la comunicazione inter-processore. Il firmware OpenMV viene eseguito solo sull’M7; l’M4 non ha un runtime MicroPython proprio, quindi utilizzarlo significa creare un’immagine firmware C separata e caricarla dal filesystem tramite openamp.RemoteProc. Un firmware di esempio pre-compilato che implementa un endpoint UART virtuale è disponibile nel repository openamp_vuart — seguire il suo README per compilare vuart.elf
import openamp
import time
def ept_recv_callback(src_addr, data):
print("Received:", data.decode())
ept = openamp.Endpoint("vuart-channel", callback=ept_recv_callback)
rproc = openamp.RemoteProc("vuart.elf")
rproc.start()
count = 0
while True:
if ept.is_ready():
ept.send("Hello World %d!" % count, timeout=1000)
count += 1
time.sleep_ms(1000)
In pratica conviene considerare questo supporto come una dimostrazione dell’interfaccia openamp piuttosto che come una piattaforma dual-core funzionante — l’M4 non può essere resettato indipendentemente dall’M7, quindi arrestare l’M4 forza un riavvio completo del sistema.
Display (J5)¶
J5 è un connettore MIPI-DSI per l”Arduino Giga Display Shield — un pannello touch capacitivo 480 × 800 costruito attorno al driver di pannello ST7701 e al controller touch GT911. Entrambi i driver vengono forniti freezati con il firmware. Utilizzare display — driver del display per inviare framebuffer e gt911.GT911 per l’input touch.
L’esempio seguente replica la camera in una finestra display verticale 800 × 480 e sovrappone ogni contatto touch come un cerchio colorato:
import csi
import time
import image
import display
from gt911 import GT911
from machine import I2C
IMG_OFFSET = 80
touch_detected = False
points_colors = ((255, 0, 0), (0, 255, 0), (0, 0, 255),
(0, 255, 255), (255, 255, 0))
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.VGA)
lcd = display.DSIDisplay(
framesize=display.FWVGA,
portrait=True,
refresh=60,
controller=display.ST7701(),
)
# Pass pin names (not Pin objects) so the driver can flip
# the reset pin's direction during start-up.
touch = GT911(
I2C(4, freq=400_000),
reset_pin="D71",
irq_pin="D70",
touch_points=5,
refresh_rate=240,
reverse_x=True,
touch_callback=lambda pin: globals().update(touch_detected=True),
)
clock = time.clock()
while True:
clock.tick()
img = csi0.snapshot()
if touch_detected:
n, points = touch.read_points()
for i in range(n):
img.draw_circle(
(points[i][0] - IMG_OFFSET,
points[i][1],
points[i][2] * 3),
color=points_colors[points[i][3]],
thickness=2,
)
touch_detected = False
lcd.write(img, y=IMG_OFFSET, hint=image.TRANSPOSE | image.VFLIP)
print(clock.fps())
Avvertimento
La Giga Display Shield utilizza lo stesso bus I²C 4 (SDA1/SCL1) della camera, D74 per l’abilitazione della retroilluminazione LCD, D70/D71 per l’IRQ e il reset del touch GT911 e D68/D69 per i segnali TE e RESET del pannello DSI.
Microfono (Display Shield)¶
L’Arduino Giga Display Shield è dotata di un microfono digitale collegato alla periferica DFSDM dello STM32H747 (clock microfono su D75, dati microfono su D73). Il microfono viene acquisito tramite audio — Modulo Audio. Ogni buffer arriva come PCM con segno a 16 bit in un bytearray, pronto per essere passato a ulab/numpy per l’elaborazione del segnale:
import audio
from ulab import numpy as np
def loudness(pcmbuf):
samples = np.array(np.frombuffer(pcmbuf, dtype=np.int16), dtype=np.float)
rms = np.sqrt(np.mean(samples ** 2))
if rms > 10000:
print("Loud!", int(rms))
audio.init(channels=1, frequency=16000, gain_db=24)
audio.start_streaming(loudness)
while True:
pass
IMU (Display Shield)¶
L’Arduino Giga Display Shield è dotata di una IMU a 6 assi Bosch BMI270 (accelerometro 3D + giroscopio 3D) sullo stesso bus I²C 4 all’indirizzo 0x68. Utilizzare il driver della community micropython_bmi270 per leggerla:
import time
from machine import I2C
from micropython_bmi270 import bmi270
sensor = bmi270.BMI270(I2C(4, freq=400_000))
sensor.load_config_file()
while True:
ax, ay, az = sensor.acceleration # m/s²
gx, gy, gz = sensor.gyro
print(ax, ay, az, gx, gy, gz)
time.sleep_ms(100)
La mappa completa dei registri è nel datasheet del BMI270.
LED RGB (Display Shield)¶
L’Arduino Giga Display Shield è dotata di un LED RGB integrato pilotato da un driver LED a 3 canali ISSI IS31FL3197 sullo stesso bus I²C 4. Il pin AD del driver è collegato a GND, quindi si trova all’indirizzo I²C 0x50. Utilizzare il driver della community IS31FL3197 per controllare il LED:
from machine import I2C
from is31fl3197 import IS31FL3197
led = IS31FL3197(I2C(4, freq=400_000))
led.set_color(255, 0, 0) # full red
La mappa completa dei registri è nel datasheet dell’IS31FL3197.
Wi-Fi¶
Il Murata 1DX (CYW4343W) integrato è esposto tramite network — configurazione di rete come interfaccia station. Collegare l’antenna fornita al connettore U.FL integrato prima di attivare la radio:
import network, time
wlan = network.WLAN(network.STA_IF)
wlan.active(True)
wlan.connect("ssid", "password")
while not wlan.isconnected():
time.sleep(1)
print("Wi‑Fi IP:", wlan.ipconfig("addr4")[0])
Bluetooth¶
Lo stesso Murata 1DX espone anche il Bluetooth LE 5.1. Utilizzare aioble — BLE asincrono per il BLE compatibile con asyncio — ad esempio, fare advertising come periferica e attendere che un central si connetta:
import asyncio
import aioble
async def run():
while True:
conn = await aioble.advertise(250_000, name="Giga-R1")
print("Connected:", conn.device)
await conn.disconnected()
asyncio.run(run())
Riferimento dei bus¶
GPIO¶
Utilizzare machine.Pin per leggere o pilotare uno qualsiasi dei pin serigrafati. Le uscite sono CMOS a 3,3 V e possono assorbire/erogare fino a 20 mA per pin (140 mA totali su tutto l’header).
from machine import Pin
out = Pin("D2", Pin.OUT)
out.on()
out.off()
out.value(1)
inp = Pin("D3", Pin.IN, Pin.PULL_UP)
print(inp.value())
Qualsiasi pin di ingresso può anche generare un interrupt sulle transizioni di fronte:
def handler(pin):
print("triggered:", pin)
Pin("D3", Pin.IN, Pin.PULL_UP).irq(
handler, Pin.IRQ_FALLING | Pin.IRQ_RISING,
)
UART¶
Bus |
TX |
RX |
Nome Arduino |
|---|---|---|---|
UART1 |
D1 |
D0 |
Serial1 |
UART6 |
D14 |
D15 |
Serial2 |
UART4 |
D16 |
D17 |
Serial3 |
UART2 |
D18 |
D19 |
Serial4 |
from machine import UART
uart = UART(1, baudrate=115200)
uart.write("hello")
uart.read(5)
I²C¶
Bus |
SCL |
SDA |
|---|---|---|
I2C2 |
D21 |
D20 |
I2C1 |
D8 |
D9 |
I2C4 |
SCL1 |
SDA1 |
from machine import I2C
i2c = I2C(2, freq=400_000)
i2c.scan()
i2c.writeto(0x76, b"hi")
Il bus 2 (D20/D21, i serigrafati SCL/SDA) è il bus Wire Arduino predefinito. Il bus 4 (SCL1/SDA1) è condiviso con la camera e con il controller touch GT911 della Giga Display Shield — i dispositivi utente su questo bus devono evitare i seguenti indirizzi (7 bit):
0x3C— OV5640 / GC21450x24— HM01B0 / HM03600x21— OV76700x5D— controller touch GT911 (Giga Display Shield)
Lo stesso hardware può essere usato anche in modalità target (slave) tramite machine.I2CTarget per esporre una regione di memoria a un altro controller I²C:
from machine import I2CTarget
buf = bytearray(32)
target = I2CTarget(2, addr=0x42, mem=buf)
SPI¶
Bus |
MOSI |
MISO |
SCK |
|---|---|---|---|
SPI1 |
D90 |
D89 |
D91 |
SPI5 |
D11 |
D12 |
D13 |
SPI1 è esposto su un header dedicato a 6 pin sul lato frontale della scheda. SPI5 è esposto sulle etichette serigrafate COPI/CIPO/SCK su D11/D12/D13.
Nota
Pinout dell’header SPI1 frontale a 6 pin (J7):
Pin |
Segnale |
|---|---|
1 |
|
2 |
+5V |
3 |
|
4 |
|
5 |
NRST |
6 |
GND |
from machine import SPI
from machine import Pin
spi = SPI(5, baudrate=10_000_000)
cs = Pin("D10", Pin.OUT, value=1) # CS is not driven by the SPI peripheral
cs.value(0)
spi.write(b"hello")
cs.value(1)
CAN (FDCAN)¶
Bus |
TX |
RX |
|---|---|---|
FDCAN2 |
D94 |
D93 |
from machine import CAN
can = CAN(2, 500_000)
can.set_filters(None)
can.send(0x123, b"\xDE\xAD\xBE\xEF")
print(can.recv())
ADC¶
La Giga R1 espone dodici canali ADC a 12 bit su A0–A11, tutti riferiti a 3,3 V — read_u16 restituisce 0–65535 nell’intervallo 0–3,3 V al pin. A8–A11 sono pad _C solo analogici senza periferica GPIO:
from machine import ADC
import time
adc = ADC("A0")
while True:
voltage = adc.read_u16() * 3.3 / 65535
print(voltage)
time.sleep_ms(100)
Nota
A7 è anche collegato all”ingresso microfono sul jack audio TRRS da 3,5 mm — quando è inserita una cuffia, ADC("A7") legge direttamente il segnale analogico del microfono.
DAC¶
Due canali DAC a 12 bit sono esposti su DAC0 e DAC1 tramite pyb.DAC. Entrambi sono collegati al jack audio TRRS da 3,5 mm come canali line-out sinistro e destro:
from pyb import DAC
left = DAC("DAC0")
right = DAC("DAC1")
left.write(int(0.5 * 255)) # 8‑bit, ~1.65 V
right.write(int(0.5 * 255))
PWM¶
Pin |
Timer / canale |
|---|---|
D0 |
TIM4 CH2 / TIM17 CH1N |
D1 |
TIM1 CH2 |
D2 |
TIM2 CH4 / TIM5 CH4 / TIM15 CH2 |
D3 |
TIM2 CH3 / TIM5 CH3 / TIM15 CH1 |
D4 |
TIM1 CH3N / TIM8 CH1 |
D5 |
TIM1 CH1N / TIM3 CH2 / TIM8 CH1N / TIM14 CH1 |
D6 |
TIM4 CH2 |
D7 |
TIM3 CH1 |
D8 |
TIM4 CH3 / TIM16 CH1 |
D9 |
TIM4 CH4 / TIM17 CH1 |
D10 |
TIM1 CH1 / TIM8 CH3N |
D11 |
TIM1 CH2N / TIM8 CH2 |
D12 |
TIM1 CH2 / TIM8 CH2N |
D13 |
TIM12 CH1 |
D15 |
TIM3 CH2 / TIM8 CH2 |
D16 |
TIM8 CH1N |
D20 |
TIM2 CH4 |
D37 |
TIM8 CH2 |
D38 |
TIM8 CH2N |
D40 |
TIM15 CH2 |
D46 |
TIM8 CH3N |
D48 |
TIM1 CH1N / TIM8 CH3 |
D51 |
TIM15 CH1 |
D54 |
TIM8 CH1 |
D56 |
TIM3 CH1 / TIM13 CH1 |
D57 |
TIM1 CH3 / TIM8 CH1N |
D58 |
TIM8 CH3 |
D59 |
TIM8 CH2 |
D61 |
TIM8 CH2N |
D63 |
TIM5 CH2 |
D64 |
TIM5 CH1 |
D65 |
TIM12 CH2 |
D68 |
TIM3 CH1 / TIM8 CH1 |
D69 |
TIM5 CH4 |
D71 |
TIM8 CH4 |
D78 / A2 |
TIM1 CH2N / TIM3 CH3 / TIM8 CH2N |
D79 / A3 |
TIM1 CH3N / TIM3 CH4 / TIM8 CH3N |
D83 / A7 |
TIM2 CH1 / TIM5 CH1 |
D85 / A13 |
TIM2 CH1 / TIM8 CH1N |
Pilotare uno qualsiasi di essi tramite machine.PWM
from machine import Pin, PWM
pwm = PWM(Pin("D2"), freq=1_000, duty_u16=32768)
Avvertimento
TIM1 è riservato al clock master della camera quando la camera è inizializzata tramite csi — sensori camera. I pin la cui unica funzione PWM è su TIM1 — D1, D10, D11, D12 — non possono essere pilotati in PWM mentre la camera è attiva. Tutti gli altri pin elencati hanno alternative non-TIM1.
Nota
Diversi pin condividono i canali timer:
TIM2 CH4 è su
D2eD20.TIM2 CH1 è su
D83/A7eD85/A13.TIM3 CH1 è su
D7,D56, eD68.TIM3 CH2 è su
D5eD15.TIM4 CH2 è su
D0eD6.TIM5 CH1 è su
D64eD83/A7.TIM5 CH4 è su
D2eD69.TIM8 CH1 è su
D4,D54, eD68.TIM8 CH1N è su
D5,D16,D57, eD85/A13.TIM8 CH2 è su
D11,D15,D37, eD59.TIM8 CH2N è su
D12,D38,D61, eD78/A2.TIM8 CH3 è su
D48eD58.TIM8 CH3N è su
D10,D46, eD79/A3.TIM15 CH1 è su
D3eD51.TIM15 CH2 è su
D2eD40.
Scegliere un solo consumer per canale timer.
Bus software con bit-banging¶
machine.SoftI2C e machine.SoftSPI funzionano su qualsiasi GPIO se serve un bus aggiuntivo.
Sensore termico (esterno)¶
Il firmware include il driver fir — driver del sensore termico (fir == far infrared) per termocamere cablate esternamente:
MLX90621 — array IR 16 × 4
MLX90640 — array IR 32 × 24
MLX90641 — array IR 16 × 12
AMG8833 — array IR 8 × 8
Collegare il modulo al bus I²C della scheda e leggere i frame con fir.init() + fir.snapshot()
import time
import image
import fir
fir.init() # auto‑detects the sensor
clock = time.clock()
while True:
clock.tick()
try:
img = fir.snapshot(x_scale=5, y_scale=5,
color_palette=image.PALETTE_IRONBOW,
hint=image.BICUBIC,
copy_to_fb=True)
except OSError:
continue
print(clock.fps())
Il driver fir comunica con il sensore solo tramite I²C 1 — collegare il modulo a D8 (SCL) e D9 (SDA).
Temporizzazione¶
time¶
Il modulo time copre i ritardi bloccanti, i tick monotoni e la misurazione del tempo trascorso:
import time
time.sleep(1) # seconds
time.sleep_ms(500)
time.sleep_us(10)
start = time.ticks_ms()
# ...do work...
elapsed = time.ticks_diff(time.ticks_ms(), start)
Timer virtuali¶
machine.Timer pianifica callback periodiche o one-shot senza occupare uno slot timer hardware. Passare -1 come id per usare un timer virtuale (software):
from machine import Timer
one_shot = Timer(-1)
one_shot.init(period=5_000, mode=Timer.ONE_SHOT,
callback=lambda t: print("once"))
periodic = Timer(-1)
periodic.init(period=2_000, mode=Timer.PERIODIC,
callback=lambda t: print("tick"))
I valori di periodo sono in millisecondi. Chiamare deinit() per fermare e rilasciare lo slot.
Orologio in tempo reale¶
machine.RTC mantiene l’ora di sistema attraverso i reset — e attraverso lo spegnimento completo quando una batteria a bottone è collegata al pin VRTC
from machine import RTC
rtc = RTC()
rtc.datetime((2026, 4, 30, 4, 12, 0, 0, 0)) # Y, M, D, weekday, h, m, s, subsec
print(rtc.datetime())
Watchdog¶
machine.WDT resetta la scheda se l’applicazione si blocca. Una volta avviato non può essere fermato né riconfigurato — alimentarlo periodicamente all’interno del ciclo principale:
from machine import WDT
wdt = WDT(timeout=5_000) # 5 second window
while True:
# ...do work...
wdt.feed()
Informazioni di boot e runtime¶
Aggiornamento firmware (DFU)¶
La Giga R1 utilizza il double-tap reset standard di Arduino per entrare nel bootloader di Arduino. Premere rapidamente il pulsante RESET due volte — la scheda si rienumera su USB come dispositivo DFU e OpenMV IDE può flashare una nuova immagine firmware. Se il bootloader manca completamente, tenere premuto il pulsante BOOT0 mentre si preme RESET per forzare il SoC nella modalità bootloader ROM.
Uno script in esecuzione può rientrare nel bootloader su richiesta chiamando machine.bootloader()
import machine
machine.bootloader()
Filesystem e ordine di boot¶
Il firmware della Giga R1 monta fino a due filesystem all’avvio:
Flash interna — sempre montata su
/flash. Contienemain.pyeREADME.txtper impostazione predefinita; creata al primissimo avvio.ROMFS — filesystem di sola lettura, mappato in memoria su
/rom, montato automaticamente da MicroPython all’avvio.
Dopo il montaggio, la directory di lavoro è impostata su /flash. L’interprete esegue quindi gli script da quella directory:
boot.pyviene eseguito a ogni soft reset (avvio a freddo,Ctrl‑Ddalla REPL, o ogni volta che lo script in esecuzione termina).main.pyviene eseguito solo all’avvio a freddo, subito dopoboot.py. I soft reset successivi rieseguonoboot.pyma passano direttamente alla REPL — per rieseguiremain.pyoccorre resettare completamente la scheda.
Il main.py predefinito fornito su una scheda appena flashata si limita a far lampeggiare il canale blu del LED RGB utente come segnale di heartbeat (due brevi impulsi, breve pausa), così da poter verificare che il firmware si sia avviato correttamente senza alcun host collegato.
sys.path viene esteso per includere entrambi i filesystem e le rispettive sottodirectory lib/, così i moduli importabili possono trovarsi in /flash/lib o /rom/lib.
Quando è collegata via USB, /flash viene enumerata anche come unità di archiviazione di massa USB sull’host, permettendo di modificare direttamente boot.py, main.py e qualsiasi altro file. Espellere l’unità prima di resettare la scheda in modo che l’host scarichi le scritture memorizzate nella cache.
Nota
Poiché il sistema operativo tratta l’unità come un dispositivo a blocchi passivo, i file creati o modificati dal codice in esecuzione sulla camera non compariranno finché l’host non rimonta l’unità. Se sia il sistema operativo sia la camera scrivono sullo stesso filesystem contemporaneamente, vincerà il sistema operativo, sovrascrivendo le modifiche apportate dalla camera.
Nota
Il canale rosso del LED RGB utente può accendersi brevemente mentre l’host legge o scrive sull’unità di archiviazione di massa USB — è un indicatore di attività pilotato dal firmware, non un guasto.
Dimensioni di archiviazione¶
La Giga R1 viene fornita con:
/flash— filesystem FAT da 11 MB, in lettura/scrittura./rom— ROMFS di sola lettura mappata in memoria da 4 MB, usata per distribuire script e modelli ML che beneficiano dell’accesso mmap zero-copy.
Indicatore di hard fault¶
Se il LED RGB utente cicla rapidamente attraverso tutti i colori — abbastanza velocemente da sembrare un LED bianco scintillante anziché tonalità distinte — il firmware ha incontrato un hard fault irrecuperabile. Riflashare il firmware per recuperare; se il riflash non aiuta, la scheda potrebbe essere danneggiata fisicamente.
Librerie software¶
Consultare l”indice delle librerie per l’elenco completo dei moduli — inclusi quelli esclusivi della build della Giga R1.