OpenMV Cam M7¶
OpenMV Cam M7 — это плата машинного зрения на базе Cortex‑M7, построенная вокруг STMicroelectronics STM32F765 с частотой 216 МГц, 512 КБ внутренней SRAM и 2 МБ внутренней флеш‑памяти. Входящий в комплект датчик OV7725 захватывает кадры 640×480 в оттенках серого или 320×240 в RGB565 со скоростью до 150 кадров/с, а 10‑контактный пользовательский разъём предоставляет периферию UART, I²C, SPI, CAN, ADC/DAC и PWM.

Полный паспорт, фотографии и размеры см. на странице продукта OpenMV Cam M7.
Основные характеристики¶
STMicroelectronics STM32F765 Cortex‑M7 на 216 МГц.
512 КБ внутренней SRAM — внешняя SDRAM отсутствует.
2 МБ внутренней флеш‑памяти (внешняя QSPI‑флеш отсутствует).
Датчик OV7725 — 640×480 в оттенках серого или 320×240 в RGB565 со скоростью до 150 кадров/с.
Полноскоростной USB (12 Мбит/с) — определяется хостом как VCP + USB‑накопитель.
Слот microSD — SD до 2 ГБ, SDHC до 32 ГБ, SDXC до 2 ТБ.
10 вводов/выводов, толерантны к 5 В с выходом 3,3 В, 25 мА на вывод (120 мА суммарно по всему разъёму), с поддержкой прерываний. P6 не толерантен к 5 В при использовании в режиме ADC или DAC.
Пользовательский RGB‑светодиод и два мощных ИК‑светодиода на 850 нм для активной подсветки при работе в условиях слабого освещения.
Примечание
У M7 нет встроенной микросхемы управления питанием: нет разъёма для батареи, нет зарядного устройства, нет ADC для измерения напряжения батареи, нет светодиодов зарядки/состояния питания и нет аппаратной кнопки питания. Питайте плату от USB или VIN.
Распиновка¶
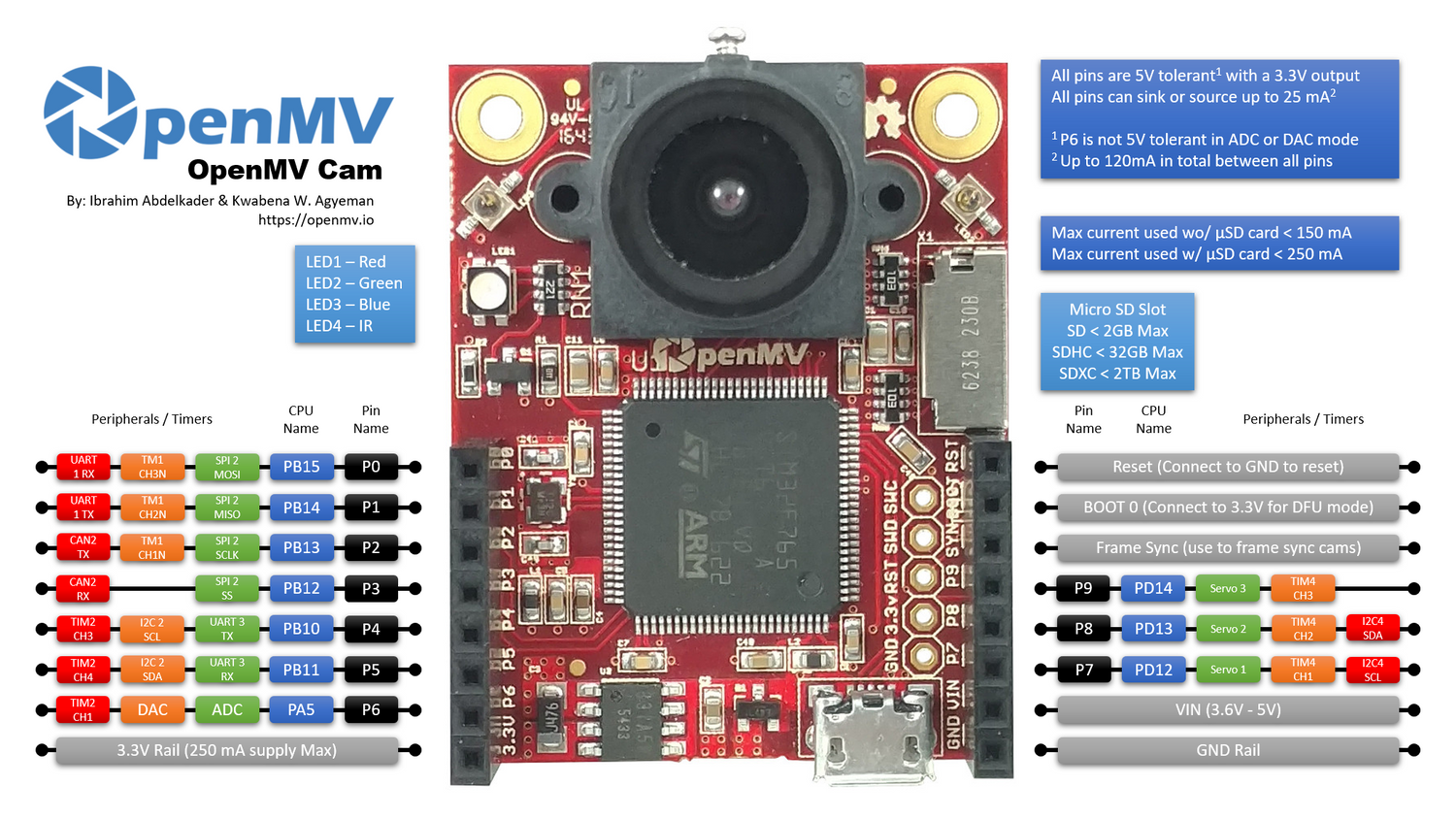
Справочник по выводам¶
Имя вывода |
Функция |
|---|---|
P0 |
UART1 RX / SPI2 MOSI |
P1 |
UART1 TX / SPI2 MISO |
P2 |
SPI2 SCK / CAN2 TX |
P3 |
SPI2 NSS (CS) / CAN2 RX |
P4 |
I2C2 SCL / UART3 TX / TIM2 CH3 |
P5 |
I2C2 SDA / UART3 RX / TIM2 CH4 |
P6 |
ADC / DAC / TIM2 CH1 |
P7 |
I2C4 SCL / TIM4 CH1 |
P8 |
I2C4 SDA / TIM4 CH2 |
P9 |
TIM4 CH3 |
RESET |
замкните на GND для сброса платы |
SYN |
контактная площадка синхронизации кадров — подключена только к датчику камеры |
BOOT0 |
подайте 3,3 В при включении питания для входа в DFU / ROM‑загрузчик |
LED_RED |
красный канал RGB‑светодиода (активный низкий уровень) |
LED_GREEN |
зелёный канал RGB‑светодиода (активный низкий уровень) |
LED_BLUE |
синий канал RGB‑светодиода (активный низкий уровень) |
LED_IR |
мощные ИК‑светодиоды (оба канала управляются совместно) |
Примечание
Площадка SYN на разъёме подключена напрямую к линии триггера / экспозиции датчика камеры — на M7 она не соединена с MCU. Управляйте ею или считывайте её внешними средствами; из MicroPython переключить её нельзя.
Выводы питания¶
3.3V — стабилизированная шина 3,3 В. Для шилдов доступно до 250 мА (меньше, если используется карта microSD). В отличие от более новых камер этот вывод двунаправленный — см. предупреждение ниже.
VIN — вход 3,6 – 5 В. Питает плату через встроенный стабилизатор.
GND — общая земля.
Примечание
Когда присутствуют и USB, и VIN, плату питает тот из них, у которого выше напряжение — встроенные диоды просто выбирают более сильную шину.
Предупреждение
Вы можете питать M7, подавая 3,3 В напрямую на вывод 3.3V, если не хотите использовать встроенный стабилизатор. В этом случае не подавайте одновременно питание на VIN или USB — обратная подача напряжения на стабилизатор при активном другом источнике питания может необратимо повредить и вывести камеру из строя.
Совет
Используйте оценщик времени работы от батареи, чтобы смоделировать, как долго M7 проработает от батареи при заданном цикле работы активный режим / глубокий сон.
Выводы восстановления и отладки¶
RESET — замкните на GND для сброса платы. Отпускание позволяет MCU запуститься в обычном режиме.
BOOT0 — подайте 3,3 В во время подачи питания на плату для входа в ROM‑загрузчик STM32 (режим DFU). OpenMV IDE использует этот режим для перепрошивки встроенного загрузчика.
На плате рядом с разъёмом GPIO выведен отладочный разъём SWD (RST / SWCLK / SWDIO), совместимый с адаптерами ST‑LINK и SEGGER J‑Link.
Встроенная периферия¶
Светодиоды¶
У M7 есть один пользовательский RGB‑светодиод и пара мощных ИК‑светодиодов на 850 нм:
Пользовательский RGB‑светодиод — управляется программно, доступен как
LED_RED,LED_GREENиLED_BLUE:from machine import LED LED("LED_RED").on() LED("LED_GREEN").on() LED("LED_BLUE").on()
ИК‑светодиоды — оба светодиода управляются совместно через вывод
LED_IR.LED_IRподключён в аппаратуре с активным высоким уровнем, тогда как прошивка рассматривает все остальные встроенные светодиоды как активные с низким уровнем, поэтому используйтеlow()/high(), а неon()/off()(что инвертировало бы смысл):from machine import LED ir = LED("LED_IR") ir.low() # turn IR illumination ON ir.high() # turn IR illumination OFF
Датчик камеры¶
OV7725 управляется через модуль csi — датчики камеры:
import csi
cam = csi.CSI()
cam.reset()
cam.pixformat(csi.RGB565)
cam.framesize(csi.QVGA)
cam.snapshot(time=2000) # let auto‑exposure settle
while True:
img = cam.snapshot()
На M7 датчик припаян к плате — он не находится на сменном модуле.
Карта microSD¶
При установке карты она автоматически монтируется в /sdcard и доступна через обычную файловую систему:
import os
for entry in os.listdir("/sdcard"):
print(entry)
Справочник по шинам¶
GPIO¶
Используйте machine.Pin для чтения или управления любым из выводов, обозначенных на шелкографии. Выходы — 3,3 В CMOS, толерантны к 5 В на входе, и могут принимать/отдавать до 25 мА на вывод (120 мА суммарно по всему разъёму).
from machine import Pin
out = Pin("P0", Pin.OUT)
out.on()
out.off()
out.value(1)
inp = Pin("P1", Pin.IN, Pin.PULL_UP)
print(inp.value())
Любой входной вывод также может вызывать прерывание при перепадах фронта:
def handler(pin):
print("triggered:", pin)
Pin("P1", Pin.IN, Pin.PULL_UP).irq(
handler, Pin.IRQ_FALLING | Pin.IRQ_RISING,
)
UART¶
Шина |
TX |
RX |
|---|---|---|
UART1 |
P1 |
P0 |
UART3 |
P4 |
P5 |
from machine import UART
uart = UART(3, baudrate=115200)
uart.write("hello")
uart.read(5)
I²C¶
Шина |
SCL |
SDA |
|---|---|---|
I2C2 |
P4 |
P5 |
I2C4 |
P7 |
P8 |
from machine import I2C
i2c = I2C(2, freq=400_000)
i2c.scan()
i2c.writeto(0x76, b"hi")
Эту же аппаратуру можно использовать в режиме целевого устройства (slave) через machine.I2CTarget, чтобы предоставить область памяти другому контроллеру I²C:
from machine import I2CTarget
buf = bytearray(32)
target = I2CTarget(2, addr=0x42, mem=buf)
SPI¶
Шина |
MOSI |
MISO |
SCK |
CS |
|---|---|---|---|---|
SPI2 |
P0 |
P1 |
P2 |
P3 |
from machine import SPI
from machine import Pin
spi = SPI(2, baudrate=10_000_000)
cs = Pin("P3", Pin.OUT, value=1) # CS is not driven by the SPI peripheral
cs.value(0)
spi.write(b"hello")
cs.value(1)
CAN¶
Шина |
TX |
RX |
|---|---|---|
CAN2 |
P2 |
P3 |
from machine import CAN
can = CAN(2, 500_000)
can.set_filters(None)
can.send(0x123, b"\xDE\xAD\xBE\xEF")
print(can.recv())
ADC и DAC¶
P6 — единственный пользовательский аналоговый вывод. Его можно использовать как 12‑битный вход ADC или выход DAC.
ADC — полная шкала при 3,3 В на выводе:
from machine import ADC import time adc = ADC("P6") while True: voltage = adc.read_u16() * 3.3 / 65535 print(voltage) time.sleep_ms(100)
DAC — через
pyb.DAC. 8‑битное значение охватывает диапазон 0–3,3 В:from pyb import DAC dac = DAC("P6") voltage = 1.65 dac.write(int(voltage / 3.3 * 255))
В режиме ADC или DAC P6 толерантен только к 3,3 В — не подавайте на него 5 В.
PWM¶
Вывод |
Таймер / канал |
|---|---|
P4 |
TIM2 CH3 |
P5 |
TIM2 CH4 |
P6 |
TIM2 CH1 |
P7 |
TIM4 CH1 |
P8 |
TIM4 CH2 |
P9 |
TIM4 CH3 |
Примечание
TIM1 зарезервирован прошивкой для генерации пиксельной тактовой частоты датчика камеры, поэтому каналы TIM1, физически расположенные на P0/P1/P2, нельзя использовать для пользовательского PWM, не нарушив работу камеры.
TIM4 совместно используется с pyb.Servo — создание экземпляра серво перенастраивает весь таймер на работу на 50 Гц, поэтому не смешивайте machine.PWM на P7/P8/P9 с pyb.Servo в одном скрипте.
Управляйте любым из них через machine.PWM:
from machine import Pin, PWM
pwm = PWM(Pin("P7"), freq=1_000, duty_u16=32768)
Программно эмулируемые шины (bit‑banging)¶
machine.SoftI2C и machine.SoftSPI работают на любом GPIO, если вам нужна дополнительная шина.
Тепловой датчик (внешний)¶
Прошивка включает драйвер fir — драйвер теплового датчика (fir == far infrared, дальний инфракрасный) для внешне подключённых тепловизоров:
MLX90621 — ИК‑массив 16 × 4
MLX90640 — ИК‑массив 32 × 24
MLX90641 — ИК‑массив 16 × 12
AMG8833 — ИК‑массив 8 × 8
Подключите модуль к шине I²C платы и считывайте кадры с помощью fir.init() + fir.snapshot():
import time
import image
import fir
fir.init() # auto‑detects the sensor
clock = time.clock()
while True:
clock.tick()
try:
img = fir.snapshot(x_scale=5, y_scale=5,
color_palette=image.PALETTE_IRONBOW,
hint=image.BICUBIC,
copy_to_fb=True)
except OSError:
continue
print(clock.fps())
Драйвер fir общается с датчиком только по I²C 2 — подключите модуль к P4 (SCL) и P5 (SDA).
Тайминги¶
time¶
Модуль time охватывает блокирующие задержки, монотонные тики и измерение прошедшего времени:
import time
time.sleep(1) # seconds
time.sleep_ms(500)
time.sleep_us(10)
start = time.ticks_ms()
# ...do work...
elapsed = time.ticks_diff(time.ticks_ms(), start)
Виртуальные таймеры¶
machine.Timer планирует периодические или однократные функции обратного вызова, не занимая аппаратный слот таймера. Передайте -1 в качестве id, чтобы использовать виртуальный (программный) таймер:
from machine import Timer
one_shot = Timer(-1)
one_shot.init(period=5_000, mode=Timer.ONE_SHOT,
callback=lambda t: print("once"))
periodic = Timer(-1)
periodic.init(period=2_000, mode=Timer.PERIODIC,
callback=lambda t: print("tick"))
Значения периода задаются в миллисекундах. Вызовите deinit(), чтобы остановить и освободить слот.
Часы реального времени¶
machine.RTC сохраняет астрономическое время между сбросами:
from machine import RTC
rtc = RTC()
rtc.datetime((2026, 4, 30, 4, 12, 0, 0, 0)) # Y, M, D, weekday, h, m, s, subsec
print(rtc.datetime())
Сторожевой таймер¶
machine.WDT сбрасывает плату, если приложение зависает. После запуска его нельзя остановить или перенастроить — периодически сбрасывайте его внутри основного цикла:
from machine import WDT
wdt = WDT(timeout=5_000) # 5 second window
while True:
# ...do work...
wdt.feed()
Информация о загрузке и времени выполнения¶
Окно USB‑загрузчика¶
При каждом включении камера запускает короткий загрузчик (несколько секунд), который позволяет OpenMV IDE обновить прошивку без необходимости входить в режим DFU вручную. После истечения окна загрузчик передаёт управление boot.py, а затем main.py.
Работающий скрипт может повторно войти в загрузчик по запросу, вызвав machine.bootloader():
import machine
machine.bootloader()
Файловая система и порядок загрузки¶
Прошивка M7 при загрузке монтирует до трёх файловых систем:
Внутренняя флеш‑память — всегда монтируется в
/flash. По умолчанию содержитmain.pyиREADME.txt; создаётся при самой первой загрузке.Карта microSD — если карта вставлена, она монтируется в
/sdcard.ROMFS — доступная только для чтения, отображённая в память файловая система в
/rom, используемая для поставки крупных наборов данных (например, моделей ИИ), которым выгоден доступ без копирования. Монтируется автоматически MicroPython при запуске, до запуска любого пользовательского кода на Python.
После монтирования рабочий каталог устанавливается в /sdcard, если карта присутствует, иначе в /flash. Затем интерпретатор запускает скрипты из этого каталога:
boot.pyвыполняется при каждом программном сбросе (холодная загрузка,Ctrl‑Dиз REPL или всякий раз, когда работающий скрипт завершается).main.pyвыполняется только при холодной загрузке, сразу послеboot.py. Последующие программные сбросы повторно запускаютboot.py, но сразу переходят в REPL — чтобы повторно запуститьmain.py, нужно полностью сбросить плату.
Размещение boot.py или main.py на SD‑карте переопределяет копию во флеш‑памяти, не затрагивая её — оба файла ищутся в загрузочном каталоге (/sdcard, когда карта смонтирована, иначе /flash).
Стандартный main.py, поставляемый на только что прошитой плате, просто мигает синим каналом пользовательского RGB‑светодиода как индикатором работы (два коротких импульса, короткая пауза), чтобы вы могли понять, что прошивка загрузилась корректно, без подключения какого‑либо хоста.
sys.path расширяется и включает все три файловые системы и их подкаталоги lib/, поэтому импортируемые модули могут находиться в /flash/lib, /sdcard/lib или /rom/lib.
Чтобы заставить систему игнорировать вставленную SD‑карту (например, для запуска main.py из флеш‑памяти даже при наличии карты), создайте пустой файл с именем SKIPSD в корне /flash.
При подключении по USB загрузочная файловая система (/sdcard, если карта присутствует, иначе /flash) также определяется на хосте как USB‑накопитель, позволяя редактировать boot.py, main.py и любые другие файлы напрямую. Извлеките накопитель перед сбросом камеры, чтобы хост сбросил кэшированные записи.
Примечание
Поскольку ОС рассматривает накопитель как пассивное блочное устройство, файлы, созданные или изменённые кодом, работающим на OpenMV Cam, не появятся, пока хост не перемонтирует накопитель. Если ОС и OpenMV Cam одновременно пишут в одну и ту же файловую систему, ОС победит и перезапишет изменения, внесённые камерой. Используйте SD‑карту для любых данных, которые записывает скрипт, и перемонтируйте накопитель перед чтением этих файлов с хоста.
Примечание
Красный канал пользовательского RGB‑светодиода может кратковременно загораться, пока хост читает с USB‑накопителя или пишет на него — это индикатор активности, управляемый прошивкой, а не неисправность.
Размеры хранилища¶
M7 поставляется с:
/flash— файловая система FAT 96 КБ, чтение/запись./rom— отображённая в память ROMFS 256 КБ, только для чтения./sdcard— полный размер любой вставленной карты microSD (при наличии), чтение/запись.
Индикатор аппаратного сбоя¶
Если пользовательский RGB‑светодиод быстро перебирает все цвета — настолько быстро, что это обычно выглядит как мерцающий белый светодиод, а не как отдельные оттенки — прошивка столкнулась с неустранимым аппаратным сбоем (hard fault). Перепрошейте прошивку для восстановления; если перепрошивка не помогает, плата может быть физически повреждена.
Программные библиотеки¶
Полный список модулей — включая те, что уникальны для сборки M7 — см. в индексе библиотек.