Mapas e Dicionários¶
Os dicionários e mapas do MicroPython utilizam técnicas denominadas endereçamento aberto e sondagem linear. Este capítulo detalha ambos os métodos.
Endereçamento aberto¶
O endereçamento aberto é utilizado para resolver colisões. As colisões são ocorrências muito comuns e acontecem quando dois elementos têm o mesmo valor de hash para a mesma posição ou localização. Por exemplo, dado um hash configurado da seguinte forma:
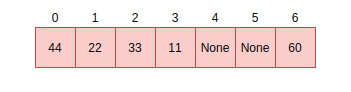
Se houver um pedido para preencher a posição 0 com 70, como a posição 0 não está vazia, o endereçamento aberto encontra a próxima posição disponível no dicionário para atender este pedido. Esta pesquisa sequencial por uma localização alternativa chama-se sondagem. Existem vários algoritmos de sondagem sequencial, mas o MicroPython utiliza a sondagem linear descrita na próxima secção.
Sondagem linear¶
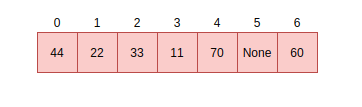
A sondagem linear é um dos métodos para encontrar um endereço ou posição disponível num dicionário. No MicroPython, é utilizada com endereçamento aberto. Para atender o pedido descrito acima, ao contrário de outros algoritmos de sondagem, a sondagem linear assume um intervalo fixo de 1 entre sondagens. O pedido será portanto atendido colocando o elemento na próxima posição livre, que é a posição 4 no nosso exemplo:
Os mesmos métodos, ou seja, endereçamento aberto e sondagem linear, são utilizados para pesquisar um elemento num dicionário. Suponha que queremos pesquisar o elemento de dados 33. O valor de hash calculado será 2. Ao olhar para a posição 2, encontramos 33. Neste ponto, retornamos True. A pesquisa por 70 é bastante diferente, pois houve uma colisão no momento da inserção. Portanto, o valor de hash calculado é 0, que atualmente contém 44. Em vez de simplesmente retornar False, realizamos uma pesquisa sequencial a partir do ponto 1 até que o elemento 70 seja encontrado ou encontremos uma posição livre. Esta é a forma geral de realizar pesquisas em hashes:
// not yet found, keep searching in this table
pos = (pos + 1) % set->alloc;
if (pos == start_pos) {
// search got back to starting position, so index is not in table
if (lookup_kind & MP_MAP_LOOKUP_ADD_IF_NOT_FOUND) {
if (avail_slot != NULL) {
// there was an available slot, so use that
set->used++;
*avail_slot = index;
return index;
} else {
// not enough room in table, rehash it
mp_set_rehash(set);
// restart the search for the new element
start_pos = pos = hash % set->alloc;
}
}
} else {
return MP_OBJ_NULL;
}