13.7.2. Przesyłanie nagrań z kamery¶
Model działa najlepiej na rodzaju obrazów, na których został wytrenowany, więc zbiór danych powinien pochodzić z kamery, która będzie go uruchamiać – ten sam sensor, ten sam obiektyw, to samo kadrowanie. Najłatwiejszym sposobem na szybkie zebranie wielu takich obrazów jest nagranie krótkiego filmu na kamerze i pozwolenie Roboflow na podzielenie go na ramki.
Nagraj klip docelowego obiektu – poruszaj nim, zmieniaj kąt i odległość, różnicuj tło i oświetlenie – i zapisz go z kamery. Na stronie Upload Data projektu upuść plik wideo.
13.7.2.1. Próbkowanie wideo na ramki¶
Roboflow pyta, jak często próbkować wideo na nieruchome obrazy. Suwak równoważy ilość względem nadmiarowości: zbyt szybko, a kolejne ramki są niemal duplikatami, które dopełniają zbiór danych, nie ucząc modelu niczego nowego; zbyt wolno, a pominiesz pozy. Jedna ramka co sekundę lub dwie to rozsądny punkt wyjścia – półminutowy klip staje się kilkuset zróżnicowanymi obrazami.
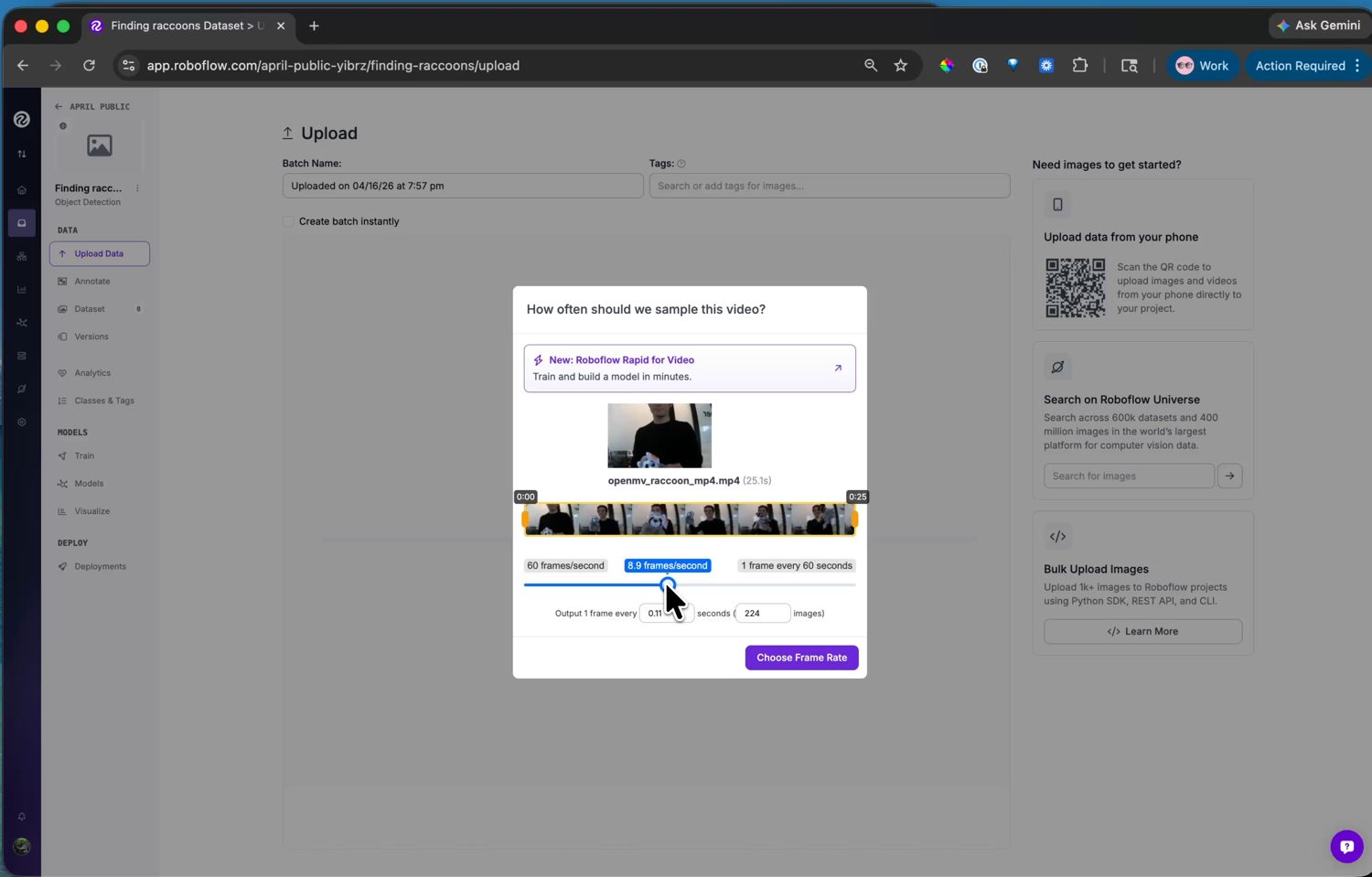
Wybór częstotliwości próbkowania – odczyt pokazuje, ile obrazów wyprodukuje klip.¶
Wybierz częstotliwość, a Roboflow wyodrębni ramki i doda je do projektu jako nieoznaczone obrazy.
Informacja
Nie potrzebujesz karty SD, aby nagrać klip. Przycisk Record w IDE przechwytuje wideo na żywo z kamery bezpośrednio do pliku na twoim komputerze – uruchom prosty skrypt przechwytywania, nagraj klip i prześlij ten plik do Roboflow.