13.7.5. Wdrażanie na kamerę¶
Wytrenowany model znajduje się na serwerach Roboflow. Umieszczenie go na kamerze wymaga jednego pobrania, a następnie tych samych kroków co ładowanie dowolnego innego modelu.
13.7.5.1. Pobieranie wag¶
Na stronie Deployments wybierz Deploy to 3rd Party Platforms i przejdź do zakładki OpenMV. Spowoduje to pobranie wag modelu jako pojedynczego pliku .tflite skwantyzowanego do liczb całkowitych, nazwanego od projektu i wersji – format int8, który uruchamia silnik TFLite kamery.
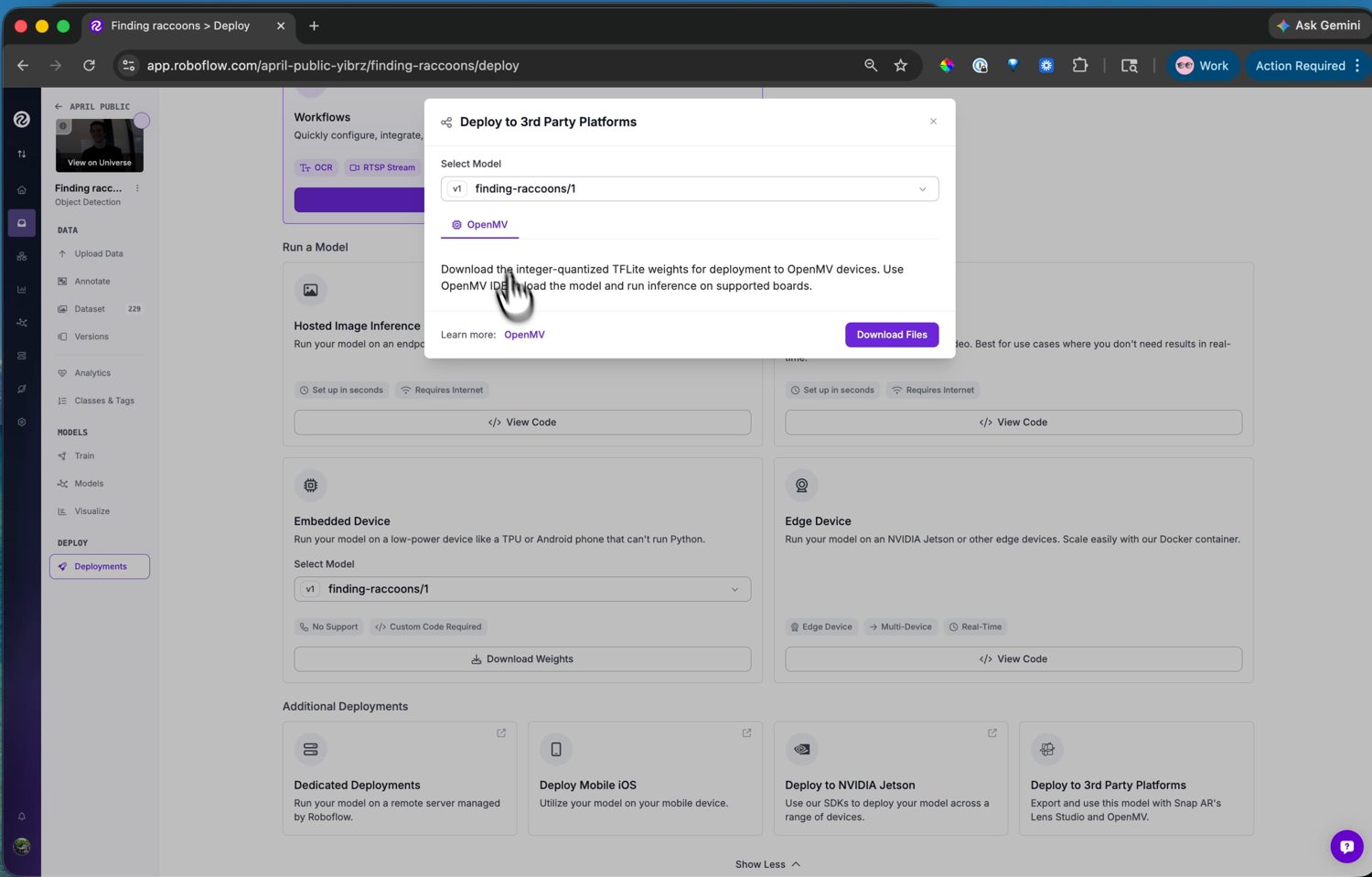
Cel wdrożenia OpenMV – przycisk Download Files zapisuje gotowe dla kamery wagi .tflite.¶
13.7.5.2. Ładowanie go na kamerę¶
Dodaj plik .tflite do kamery za pomocą edytora ROMFS w IDE, który konwertuje go dla NPU płytki, gdy ta je posiada, a następnie załaduj go w skrypcie za pomocą ml.Model. Modele można również uruchamiać z napędu flash kamery – skopiuj plik i wskaż ścieżkę w ml.Model – ale ROMFS jest lepszym miejscem: modele tam wykonują się bezpośrednio z pamięci flash bez kopii w pamięci RAM.
Surowe wyjście modelu wykrywania to tensor współrzędnych ramek i ocen klas, który nadal wymaga dekodowania. Detektory z rodziny YOLO firmy Roboflow dekodują się za pomocą postprocesorów, które kamera dostarcza w ml.postprocessing.ultralytics, więc kilka linii łączy model z jego dekoderem i otrzymujesz ramki oraz etykiety.
Zobacz także
Rozdział o uczeniu maszynowym dotyczący uruchamiania modeli za pomocą modułu ml – ładowanie, potok wnioskowania oraz omówienie dekodowania wyjścia z rodziny YOLO.