13.7.5. Déployer sur la caméra¶
Le modèle entraîné réside sur les serveurs de Roboflow. Le faire arriver sur la caméra nécessite un téléchargement, puis les mêmes étapes que pour charger n’importe quel autre modèle.
13.7.5.1. Télécharger les poids¶
Sur la page Deployments, choisissez Deploy to 3rd Party Platforms et sélectionnez l’onglet OpenMV. Cela télécharge les poids du modèle sous la forme d’un unique fichier .tflite quantifié en entiers, nommé d’après le projet et la version – le format int8 que fait tourner le moteur TFLite de la caméra.
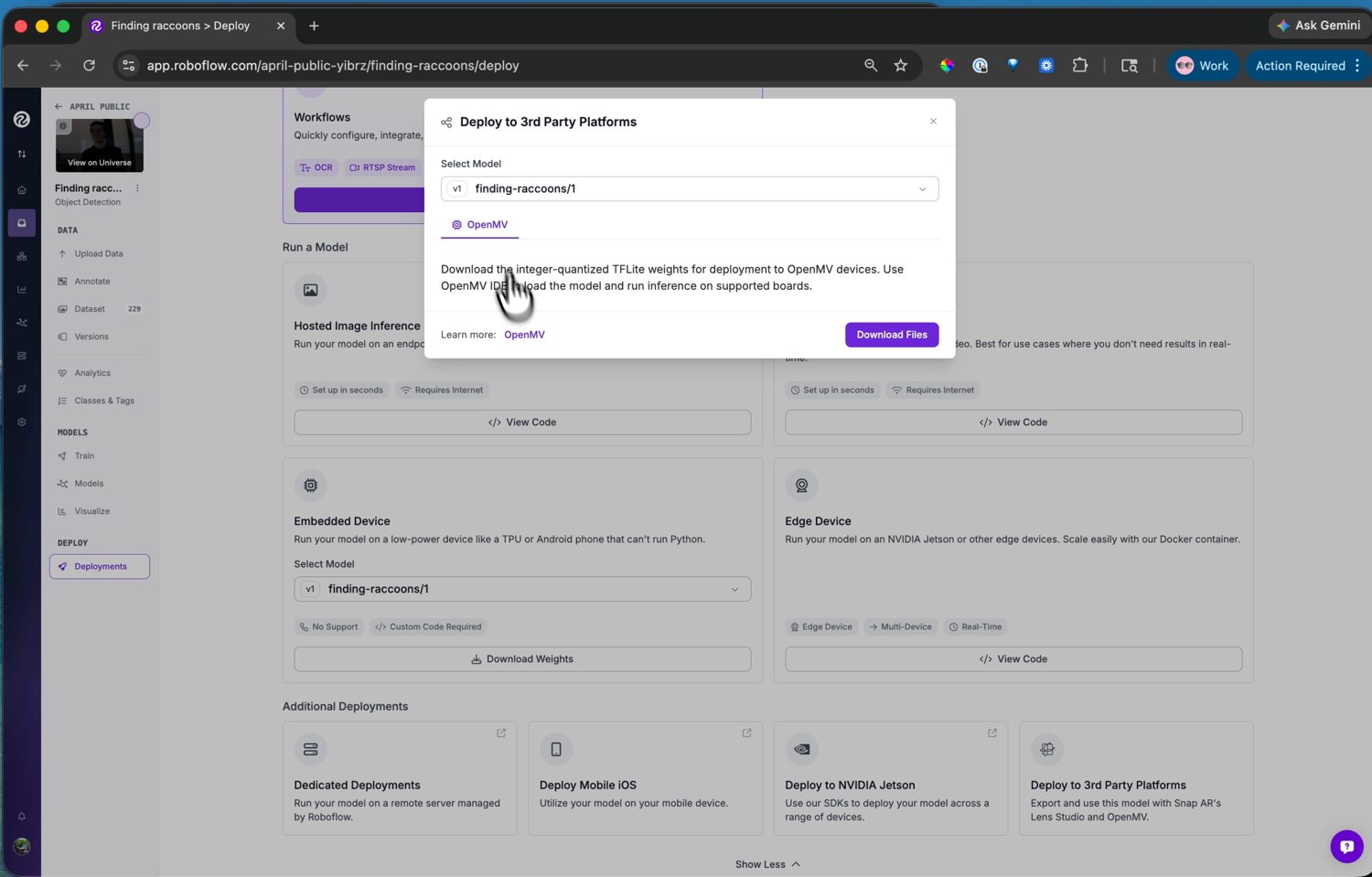
La cible de déploiement OpenMV – Download Files enregistre les poids .tflite prêts pour la caméra.¶
13.7.5.2. Le charger sur la caméra¶
Ajoutez le fichier .tflite à la caméra à l’aide de l”éditeur ROMFS de l’IDE, qui le convertit pour le NPU de la carte lorsqu’elle en possède un, puis chargez-le dans un script avec ml.Model. Les modèles fonctionnent aussi depuis le lecteur flash de la caméra – copiez-y le fichier et pointez ml.Model vers son chemin – mais ROMFS reste le meilleur emplacement : les modèles qui s’y trouvent s’exécutent directement depuis la mémoire flash sans copie en RAM.
La sortie brute d’un modèle de détection est un tenseur de coordonnées de boîtes et de scores de classes qui doit encore être décodé. Les détecteurs de la famille YOLO de Roboflow se décodent avec les post-processeurs fournis par la caméra dans ml.postprocessing.ultralytics, de sorte que quelques lignes relient le modèle à son décodeur et vous obtenez des boîtes et des étiquettes.
Voir aussi
Le chapitre sur l’apprentissage automatique pour exécuter des modèles avec le module ml – le chargement, le pipeline d’inférence, et le guide détaillé du décodage de la sortie de la famille YOLO.