13.7.5. Postavljanje na kameru¶
Trenirani model nalazi se na Roboflowovim poslužiteljima. Prebacivanje na kameru zahtijeva jedno preuzimanje, a zatim iste korake kao učitavanje bilo kojeg drugog modela.
13.7.5.1. Preuzimanje težina¶
Na stranici Deployments odaberite Deploy to 3rd Party Platforms i odaberite karticu OpenMV. Preuzima težine modela kao jednu cjelobrojno kvantiziranu .tflite datoteku, nazvanu prema projektu i verziji – int8 format koji izvodi TFLite mehanizam kamere.
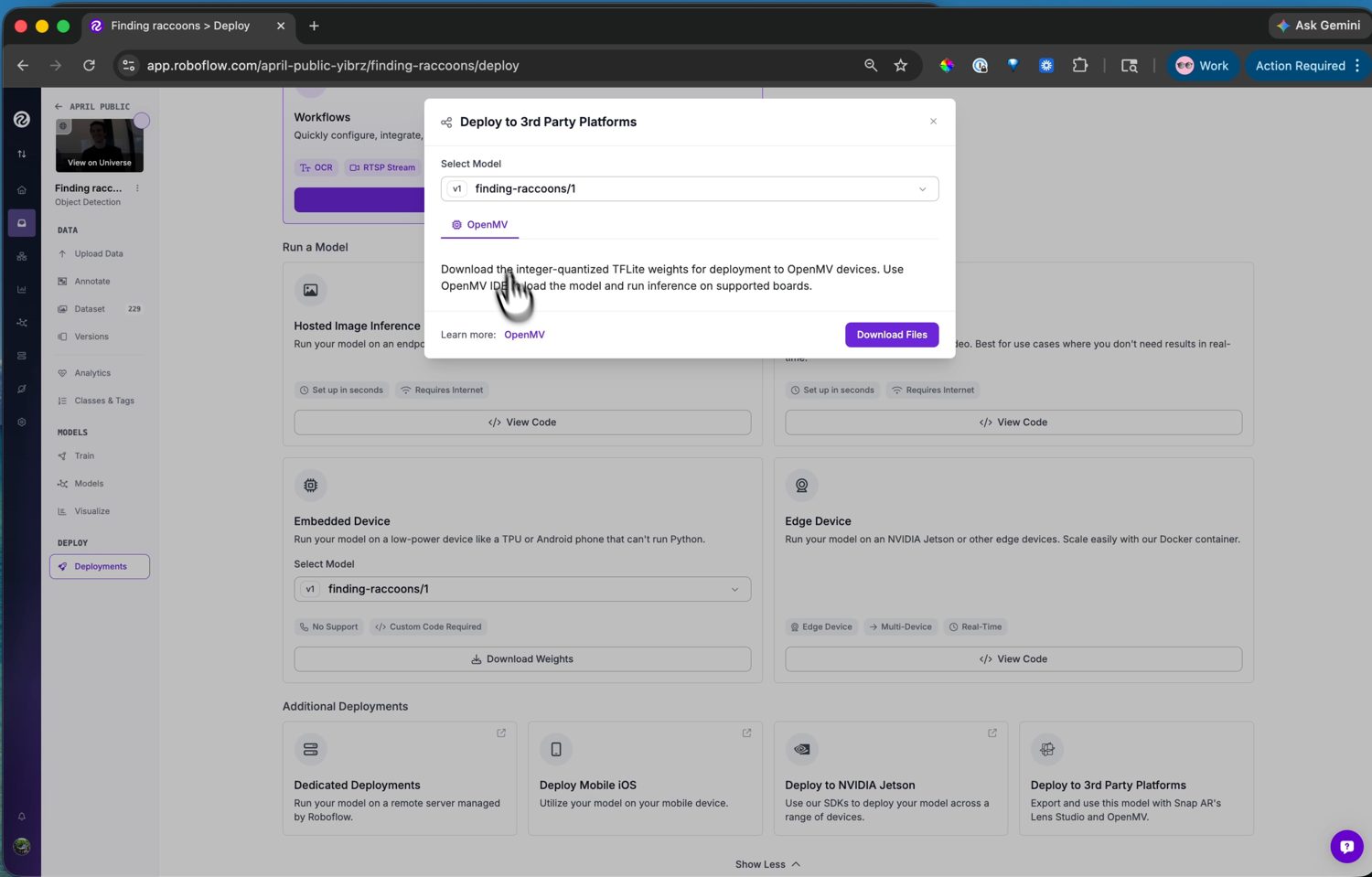
OpenMV cilj postavljanja – Download Files sprema .tflite težine spremne za kameru.¶
13.7.5.2. Učitavanje na kameru¶
Dodajte .tflite datoteku na kameru pomoću IDE-ovog ROMFS uređivača, koji je pretvara za NPU ploče kada je ploča ima, a zatim je učitajte u skripti pomoću ml.Model. Modeli se također izvode s flash diska kamere – kopirajte datoteku i usmjerite ml.Model na putanju – ali ROMFS je bolji dom: modeli ondje izvode se izravno iz flash memorije bez kopije u RAM-u.
Sirovi izlaz modela detekcije tenzor je koordinata okvira i ocjena klasa koji još treba dekodirati. Roboflowovi detektori iz YOLO obitelji dekodiraju se post-procesorima koje kamera isporučuje u ml.postprocessing.ultralytics, pa nekoliko redaka povezuje model s njegovim dekoderom i dobivate okvire i oznake.
Više informacija
Poglavlje o strojnom učenju za izvođenje modela pomoću modula ml – učitavanje, cjevovod zaključivanja te vodič kroz dekodiranje izlaza iz YOLO obitelji.