13.7.5. Auf der Kamera bereitstellen¶
Das trainierte Modell liegt auf Roboflows Servern. Um es auf die Kamera zu bringen, ist ein Download nötig, danach folgen dieselben Schritte wie beim Laden jedes anderen Modells.
13.7.5.1. Die Gewichte herunterladen¶
Wählen Sie auf der Seite Deployments die Option Deploy to 3rd Party Platforms und dann den Tab OpenMV. Es lädt die Gewichte des Modells als eine einzelne, ganzzahlig quantisierte .tflite-Datei herunter, benannt nach Projekt und Version – das int8-Format, das die TFLite-Engine der Kamera ausführt.
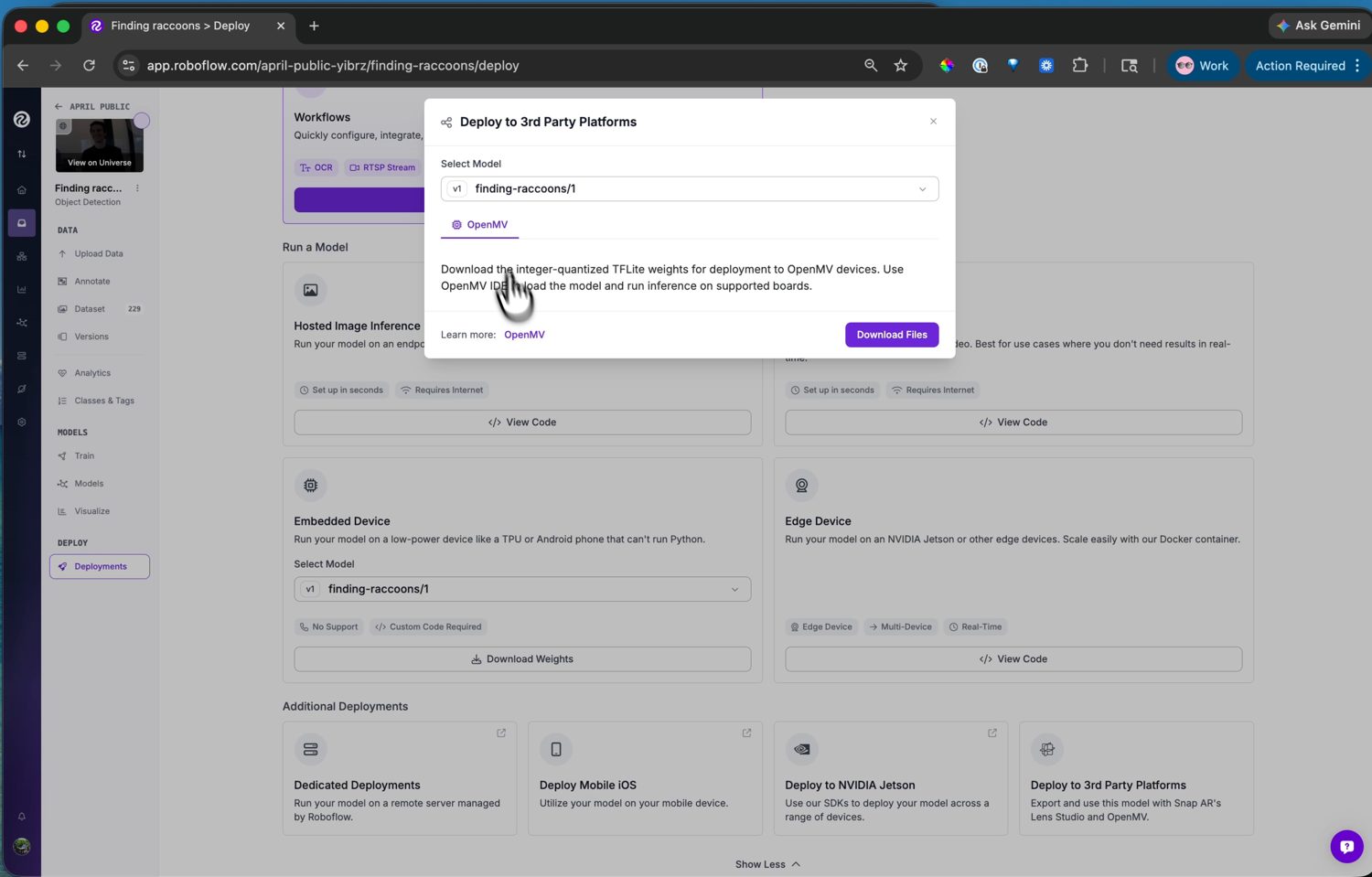
Das OpenMV-Bereitstellungsziel – Download Files speichert die kamerafertigen .tflite-Gewichte.¶
13.7.5.2. Es auf der Kamera laden¶
Fügen Sie die .tflite-Datei mit dem ROMFS-Editor der IDE zur Kamera hinzu, der sie für die NPU des Boards konvertiert, sofern das Board eine hat, und laden Sie sie dann in einem Skript mit ml.Model. Modelle laufen auch vom Flash-Laufwerk der Kamera – kopieren Sie die Datei dorthin und richten Sie ml.Model auf den Pfad – aber ROMFS ist der bessere Ort: Modelle dort werden direkt aus dem Flash ausgeführt, ohne eine RAM-Kopie.
Die Rohausgabe eines Erkennungsmodells ist ein Tensor aus Box-Koordinaten und Klassen-Scores, der noch decodiert werden muss. Roboflows Detektoren der YOLO-Familie decodieren mit den Post-Prozessoren, die die Kamera in ml.postprocessing.ultralytics mitliefert, sodass wenige Zeilen das Modell mit seinem Decoder verbinden und Sie Boxen und Labels erhalten.
Siehe auch
Das Kapitel über maschinelles Lernen zum Ausführen von Modellen mit dem ml-Modul – Laden, die Inferenz-Pipeline und der Durchlauf zum Decodieren von Ausgaben der YOLO-Familie.