13.7.5. Implementarea pe cameră¶
Modelul antrenat se află pe serverele Roboflow. Aducerea lui pe cameră necesită o singură descărcare, apoi aceiași pași ca la încărcarea oricărui alt model.
13.7.5.1. Descărcarea ponderilor¶
Pe pagina Deployments, alegeți Deploy to 3rd Party Platforms și selectați fila OpenMV. Aceasta descarcă ponderile modelului ca un singur fișier .tflite cuantizat pe întregi, denumit după proiect și versiune – formatul int8 pe care îl rulează motorul TFLite al camerei.
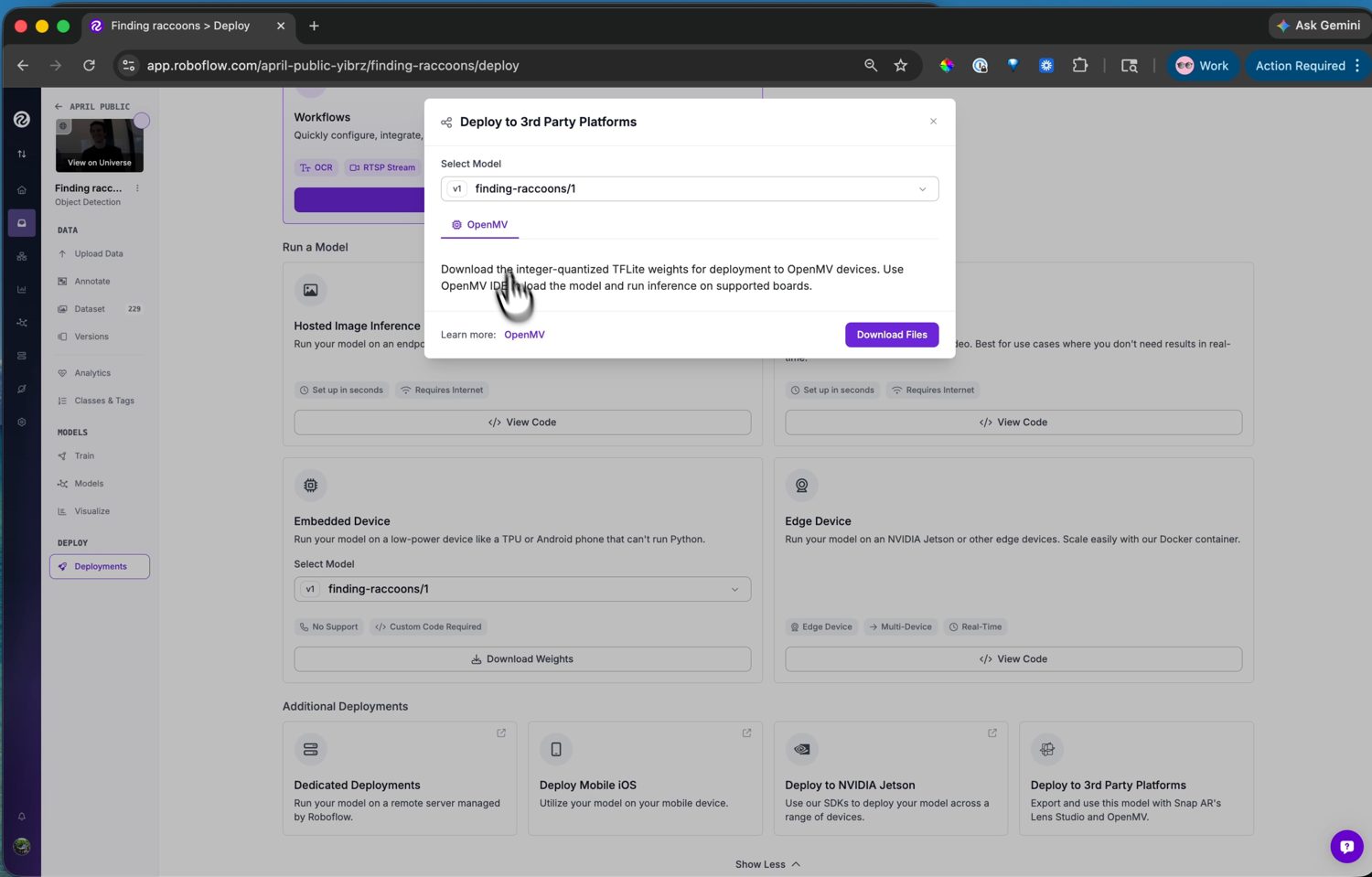
Ținta de implementare OpenMV – Download Files salvează ponderile .tflite pregătite pentru cameră.¶
13.7.5.2. Încărcarea lui pe cameră¶
Adăugați fișierul .tflite pe cameră cu editorul ROMFS al IDE-ului, care îl convertește pentru NPU-ul plăcii atunci când placa are unul, apoi încărcați-l într-un script cu ml.Model. Modelele rulează și de pe unitatea flash a camerei – copiați fișierul și îndreptați ml.Model către cale – dar ROMFS este locul mai potrivit: modelele de acolo se execută direct din memoria flash, fără o copie în RAM.
Ieșirea brută a unui model de detectare este un tensor de coordonate de casete și scoruri de clasă care încă necesită decodare. Detectoarele din familia YOLO ale Roboflow se decodează cu post-procesoarele pe care camera le include în ml.postprocessing.ultralytics, astfel încât câteva linii conectează modelul la decodorul său și obțineți casete și etichete.
Vezi și
Capitolul despre învățarea automată pentru rularea modelelor cu modulul ml – încărcarea, pipeline-ul de inferență și prezentarea detaliată a decodării ieșirii din familia YOLO.