13.7.5. Deploy sulla camera¶
Il modello addestrato risiede sui server di Roboflow. Portarlo sulla camera richiede un download, poi gli stessi passaggi del caricamento di qualsiasi altro modello.
13.7.5.1. Download dei pesi¶
Nella pagina Deployments, scegli Deploy to 3rd Party Platforms e seleziona la scheda OpenMV. Scarica i pesi del modello come un singolo file .tflite quantizzato a interi, denominato in base al progetto e alla versione – il formato int8 che il motore TFLite della camera esegue.
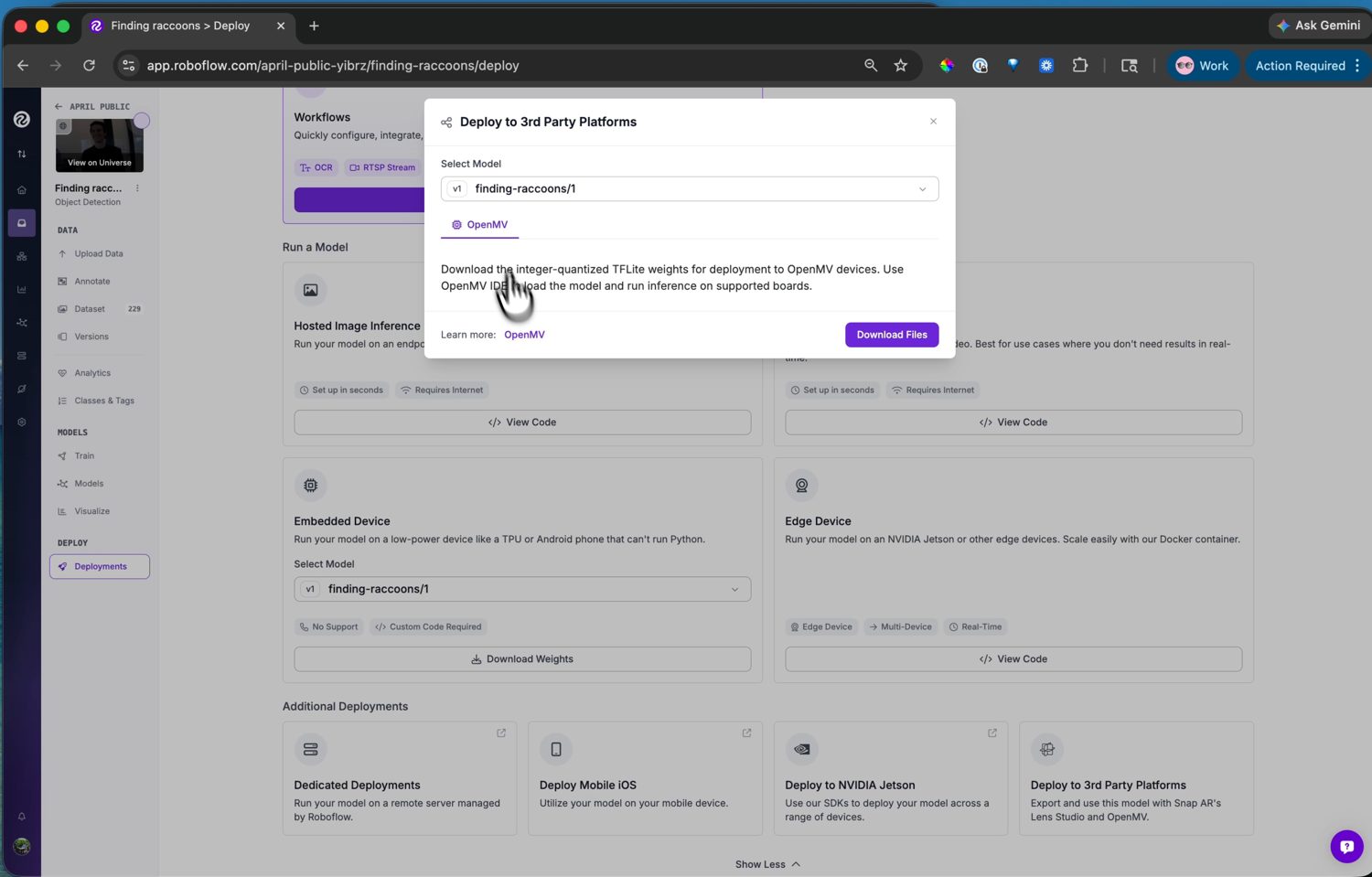
La destinazione di deploy OpenMV – Download Files salva i pesi .tflite pronti per la camera.¶
13.7.5.2. Caricarlo sulla camera¶
Aggiungi il file .tflite alla camera con l”editor ROMFS dell’IDE, che lo converte per l’NPU della scheda quando questa ne possiede uno, poi caricalo in uno script con ml.Model. I modelli si eseguono anche dall’unità flash della camera – copia il file e fai puntare ml.Model al percorso – ma ROMFS è la collocazione migliore: i modelli lì eseguono direttamente dalla flash senza una copia in RAM.
L’output grezzo di un modello di detection è un tensore di coordinate di box e punteggi di classe che necessita ancora di decodifica. I detector della famiglia YOLO di Roboflow si decodificano con i post-processori che la camera fornisce in ml.postprocessing.ultralytics, quindi poche righe collegano il modello al suo decoder e ottieni box ed etichette.
Vedi anche
Il capitolo sul machine learning per eseguire i modelli con il modulo ml – caricamento, pipeline di inferenza e la guida pratica alla decodifica dell’output della famiglia YOLO.