13.7.5. Развёртывание на камеру¶
Обученная модель находится на серверах Roboflow. Чтобы перенести её на камеру, потребуется одна загрузка, а затем те же шаги, что и при загрузке любой другой модели.
13.7.5.1. Загрузка весов¶
На странице Deployments выберите Deploy to 3rd Party Platforms и выберите вкладку OpenMV. Она загружает веса модели в виде единого квантованного в целые числа файла .tflite, названного по имени проекта и версии — формат int8, который запускает движок TFLite камеры.
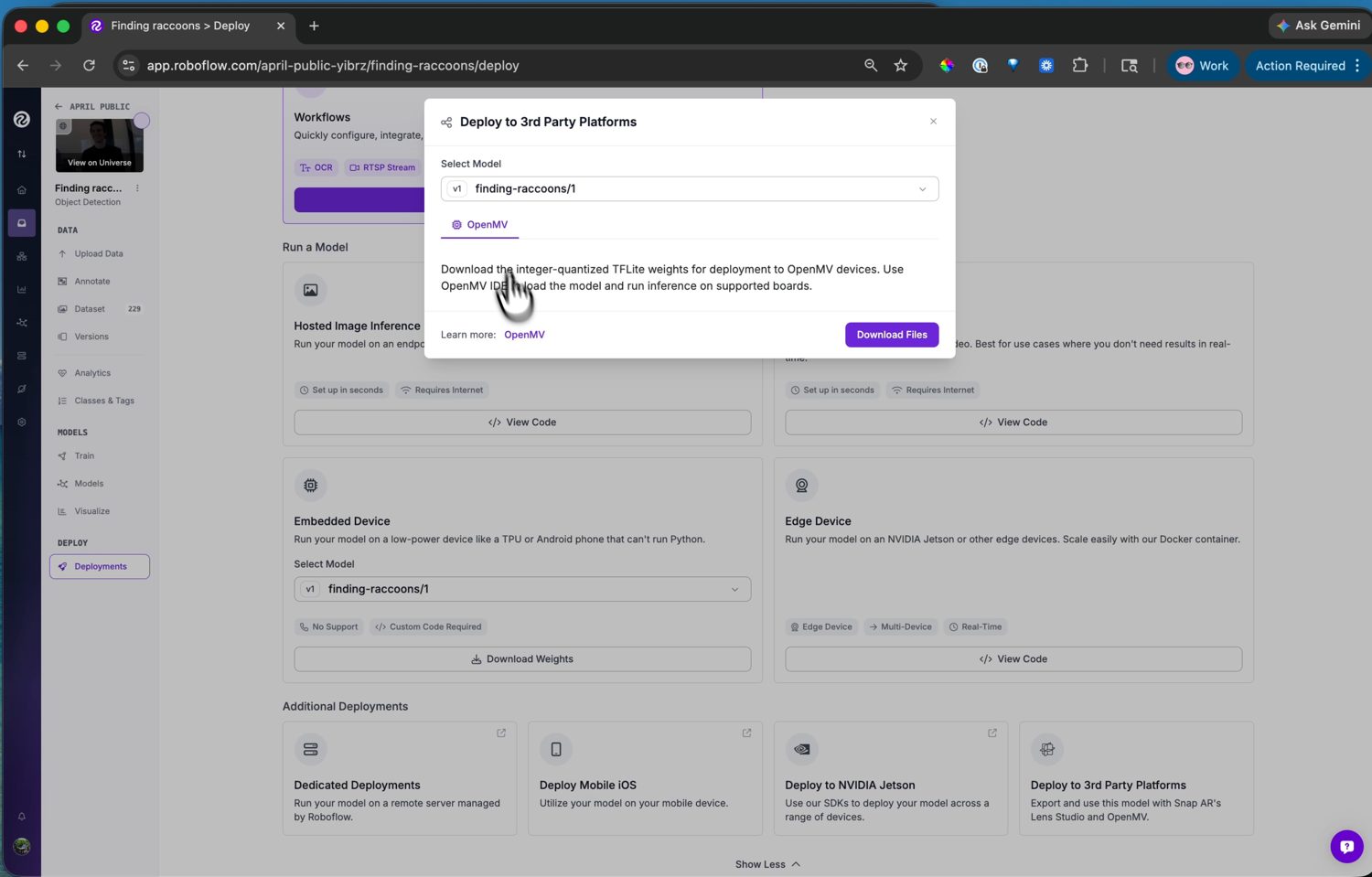
Цель развёртывания OpenMV — Download Files сохраняет готовые для камеры веса .tflite.¶
13.7.5.2. Загрузка модели на камеру¶
Добавьте файл .tflite на камеру с помощью редактора ROMFS в IDE, который преобразует его для NPU платы, если она есть, а затем загрузите его в скрипте с помощью ml.Model. Модели также запускаются с флеш-накопителя камеры — скопируйте файл и укажите ml.Model на путь — но ROMFS является лучшим местом размещения: модели там выполняются прямо из флеш-памяти без копии в RAM.
Необработанный вывод модели обнаружения — это тензор координат рамок и оценок классов, который ещё нужно декодировать. Детекторы семейства YOLO от Roboflow декодируются с помощью постобработчиков, которые камера поставляет в ml.postprocessing.ultralytics, так что несколько строк подключают модель к её декодеру, и вы получаете рамки и метки.
См. также
Глава о машинном обучении для запуска моделей с помощью модуля ml — загрузка, конвейер вывода и подробное руководство по декодированию вывода семейства YOLO.