13.7.5. カメラへのデプロイ¶
学習済みモデルはRoboflowのサーバー上にあります。これをカメラに載せるには1回のダウンロードを行い、その後は他のモデルを読み込むのと同じ手順を踏みます。
13.7.5.1. 重みのダウンロード¶
Deployments ページで Deploy to 3rd Party Platforms を選び、OpenMV タブを選択します。これにより、モデルの重みが、プロジェクトとバージョンにちなんで名付けられた単一の整数量子化済み .tflite ファイルとしてダウンロードされます。これはカメラのTFLiteエンジンが実行するint8フォーマットです。
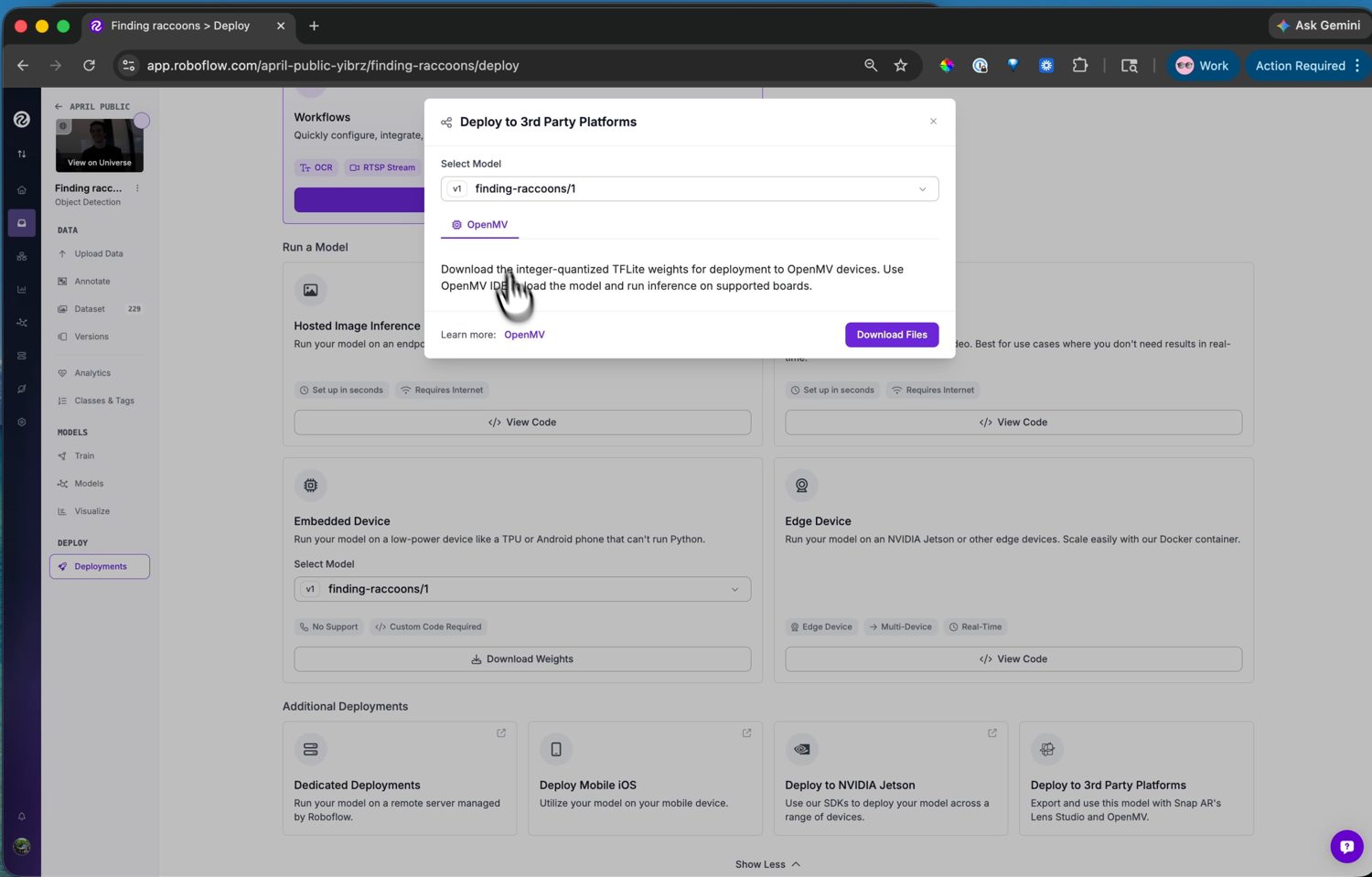
OpenMVのデプロイ先。Download Files でカメラ用に準備された .tflite の重みを保存します。¶
13.7.5.2. カメラへの読み込み¶
IDEの ROMFSエディタ で .tflite ファイルをカメラに追加します。ボードにNPUがある場合はそのNPU向けに変換され、その後 ml.Model でスクリプト内に読み込みます。モデルはカメラのフラッシュドライブからも実行できます(ファイルをコピーして ml.Model をそのパスに向けます)が、ROMFSの方が良い置き場所です。そこにあるモデルはRAMへのコピーなしでフラッシュから直接実行されます。
検出モデルのRAW出力は、ボックス座標とクラススコアのテンソルで、まだデコードが必要です。RoboflowのYOLOファミリーの検出器は、カメラに同梱されている ml.postprocessing.ultralytics のポストプロセッサでデコードされるため、数行でモデルとそのデコーダを接続すれば、ボックスとラベルが得られます。
参考
ml モジュールでモデルを実行する方法については 機械学習の章 を参照してください。読み込み、推論パイプライン、そして YOLOファミリーの出力をデコードするウォークスルー を扱っています。