13.7.5. 部署到摄像头¶
训练好的模型存放在 Roboflow 的服务器上。要将其放到摄像头上,需要进行一次下载,然后执行与加载任何其他模型相同的步骤。
13.7.5.1. 下载权重¶
在 Deployments 页面,选择 Deploy to 3rd Party Platforms,再选中 OpenMV 选项卡。它会将模型的权重下载为单个整数量化的 .tflite 文件,文件以项目和版本命名——即摄像头 TFLite 引擎所运行的 int8 格式。
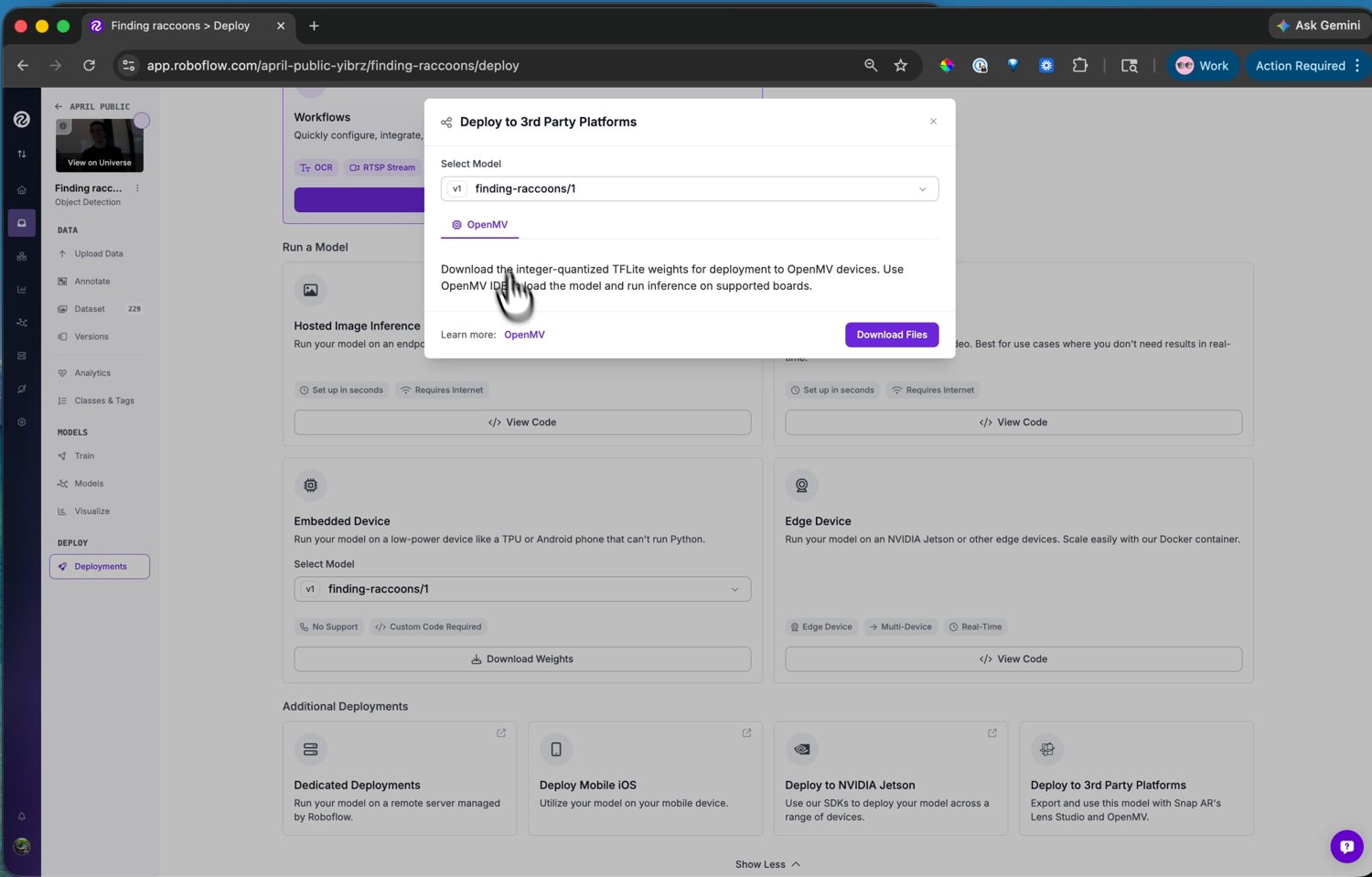
OpenMV 部署目标——Download Files 会保存可直接用于摄像头的 .tflite 权重。¶
13.7.5.2. 在摄像头上加载它¶
使用 IDE 的 ROMFS 编辑器 将 .tflite 文件添加到摄像头中,当主板带有 NPU 时它会为该主板的 NPU 进行转换,然后在脚本中用 ml.Model 加载它。模型也可以从摄像头的闪存盘运行——将文件复制过去并让 ml.Model 指向该路径——但 ROMFS 是更好的归处:存放在那里的模型可直接从闪存执行,无需 RAM 副本。
检测模型的原始输出是一个由框坐标和类别分数构成的张量,仍需进行解码。Roboflow 的 YOLO 系列检测器使用摄像头随附的 ml.postprocessing.ultralytics 后处理器进行解码,因此只需几行代码就能将模型与其解码器连接起来,从而得到框和标签。
参见
关于使用 ml 模块运行模型,请参阅 机器学习章节——其中涵盖加载、推理流水线,以及 解码 YOLO 系列输出的详细讲解。