13.7.5. Implantando na câmera¶
O modelo treinado reside nos servidores do Roboflow. Colocá-lo na câmera leva um download, seguido dos mesmos passos do carregamento de qualquer outro modelo.
13.7.5.1. Baixando os pesos¶
Na página Deployments, escolha Deploy to 3rd Party Platforms e selecione a aba OpenMV. Ela baixa os pesos do modelo como um único arquivo .tflite quantizado em inteiros, nomeado de acordo com o projeto e a versão – o formato int8 que o motor TFLite da câmera executa.
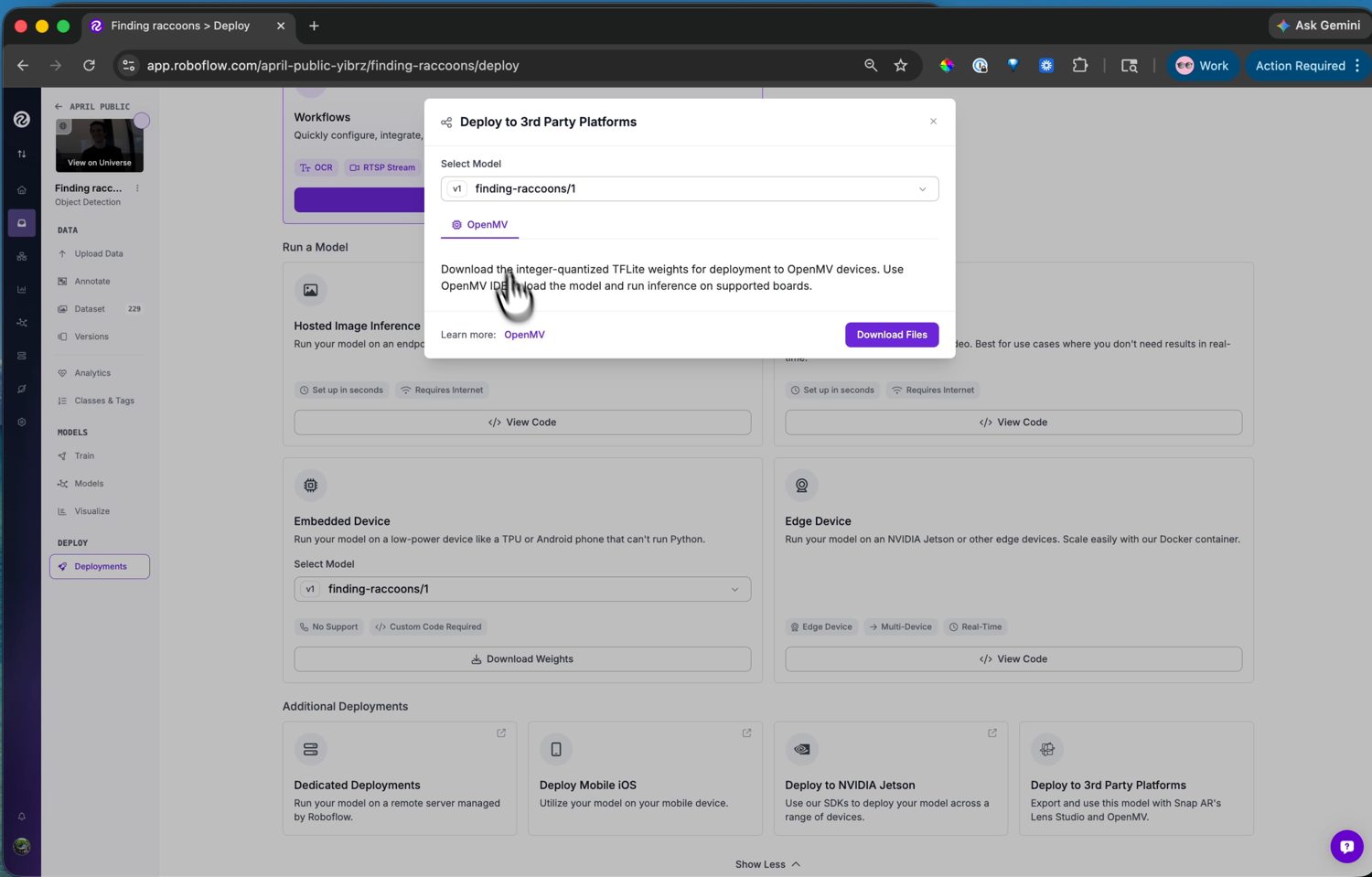
O destino de implantação OpenMV – Download Files salva os pesos .tflite prontos para a câmera.¶
13.7.5.2. Carregando na câmera¶
Adicione o arquivo .tflite à câmera com o editor de ROMFS do IDE (ROMFS editor), que o converte para a NPU da placa quando ela possui uma, e então carregue-o em um script com ml.Model. Os modelos também rodam a partir do drive flash da câmera – copie o arquivo para lá e aponte ml.Model para o caminho – mas a ROMFS é o melhor lugar: modelos lá executam diretamente da flash sem uma cópia para a RAM.
A saída bruta de um modelo de detecção é um tensor de coordenadas de caixas e pontuações de classe que ainda precisa ser decodificado. Os detectores da família YOLO do Roboflow são decodificados com os pós-processadores que a câmera inclui em ml.postprocessing.ultralytics, de modo que algumas linhas conectam o modelo ao seu decodificador e você obtém caixas e rótulos.
Ver também
O capítulo de aprendizado de máquina para executar modelos com o módulo ml – carregamento, o pipeline de inferência e o passo a passo da decodificação da saída da família YOLO.