13.7.5. 카메라에 배포하기¶
학습된 모델은 Roboflow의 서버에 있습니다. 이를 카메라로 가져오려면 한 번의 다운로드가 필요하며, 그 다음은 다른 모델을 로드하는 것과 동일한 단계를 거칩니다.
13.7.5.1. 가중치 다운로드하기¶
Deployments 페이지에서 Deploy to 3rd Party Platforms 를 선택하고 OpenMV 탭을 고르십시오. 그러면 모델의 가중치가 프로젝트와 버전 이름을 딴 단일 정수 양자화 .tflite 파일로 다운로드됩니다. 이는 카메라의 TFLite 엔진이 실행하는 int8 포맷입니다.
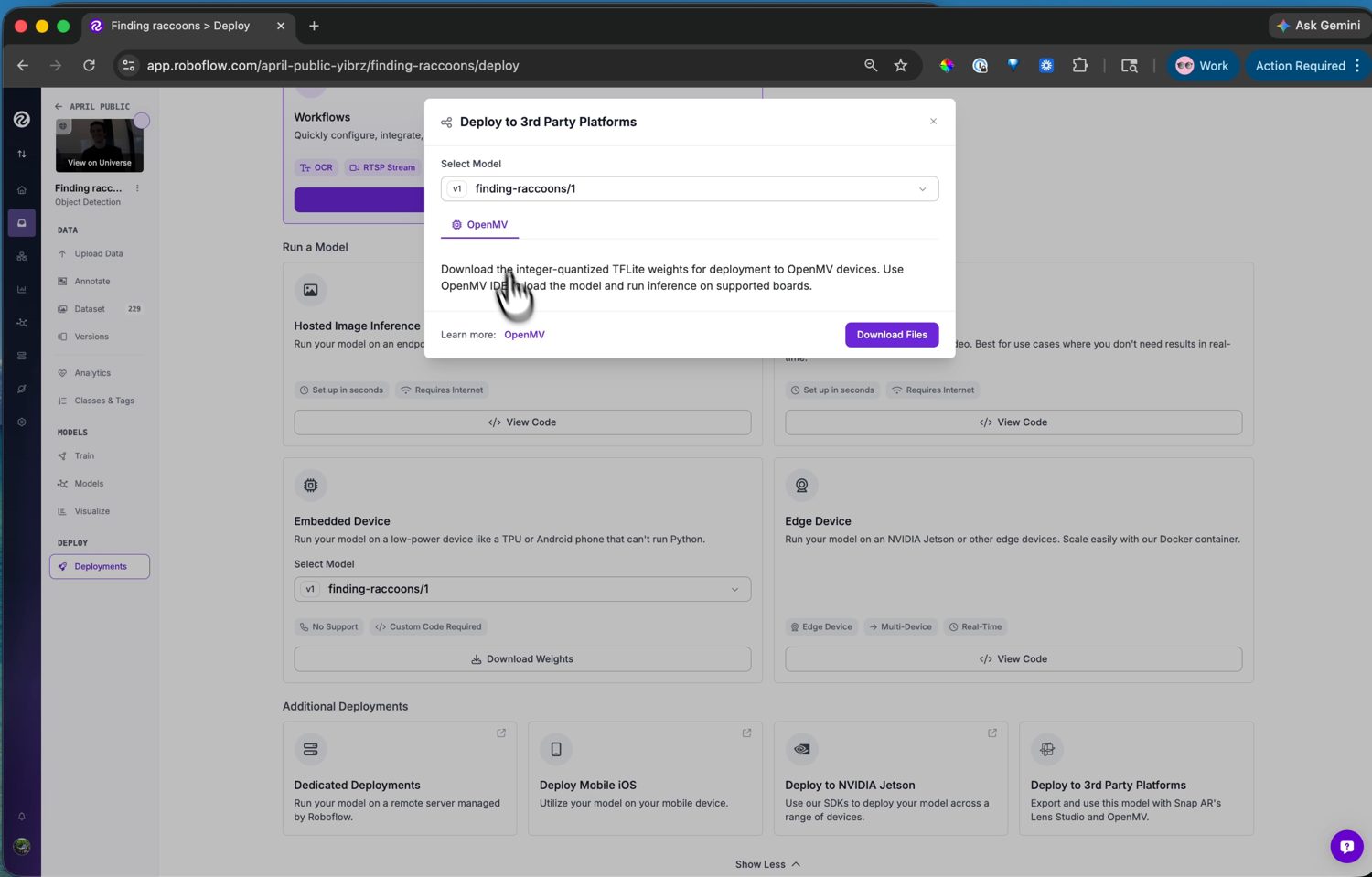
OpenMV 배포 대상 – Download Files 는 카메라에서 바로 사용할 수 있는 .tflite 가중치를 저장합니다.¶
13.7.5.2. 카메라에 로드하기¶
IDE의 ROMFS 편집기 로 .tflite 파일을 카메라에 추가하십시오. 이 편집기는 보드에 NPU가 있는 경우 보드의 NPU에 맞게 파일을 변환한 다음, 스크립트에서 ml.Model 로 로드합니다. 모델은 카메라의 플래시 드라이브에서도 실행할 수 있습니다 – 파일을 복사해 두고 ml.Model 이 그 경로를 가리키게 하면 됩니다 – 하지만 ROMFS가 더 나은 곳입니다. ROMFS에 있는 모델은 RAM 복사 없이 플래시에서 바로 실행됩니다.
검출 모델의 원시 출력은 박스 좌표와 클래스 점수로 이루어진 텐서로, 여전히 디코딩이 필요합니다. Roboflow의 YOLO 계열 검출기는 카메라가 ml.postprocessing.ultralytics 에 함께 제공하는 후처리기로 디코드되므로, 몇 줄로 모델을 디코더에 연결하면 박스와 레이블을 얻을 수 있습니다.
더 보기
ml 모듈로 모델을 실행하는 방법 – 로딩, 추론 파이프라인, 그리고 YOLO 계열 출력 디코딩 안내 – 은 머신러닝 챕터 를 참조하십시오.