13.7.4. 모델 학습하기¶
레이블이 달린 데이터셋이 준비되면, 학습은 Train 페이지에서 안내되는 흐름입니다. 데이터셋 버전을 확정하고, 아키텍처를 고른 다음, 실행을 Roboflow의 서버에 넘깁니다.
13.7.4.1. 데이터셋 버전¶
학습에 앞서 Roboflow는 데이터셋 version 을 만듭니다 – 이미지의 고정된 스냅샷에 두 가지 변환이 적용된 것입니다:
Preprocessing 은 모든 이미지를 모델이 학습하는 해상도로 리사이즈합니다. 그 해상도는 작게 유지하십시오. 카메라는 작은 모델을 실행하며, 적당한 해상도로 학습된 검출기는 카메라의 메모리에 맞고 빠르게 실행됩니다.
Augmentation 은 원본을 변형하여 – 뒤집기, 밝기와 노출 변화, 블러, 노이즈 – 추가 학습 이미지를 합성합니다. 각 증강은 모델이 카메라에서 마주칠 실제 변동을 견디도록 가르치며, 이로써 손으로 캡처한 작은 데이터셋을 훨씬 더 멀리 늘려줍니다.
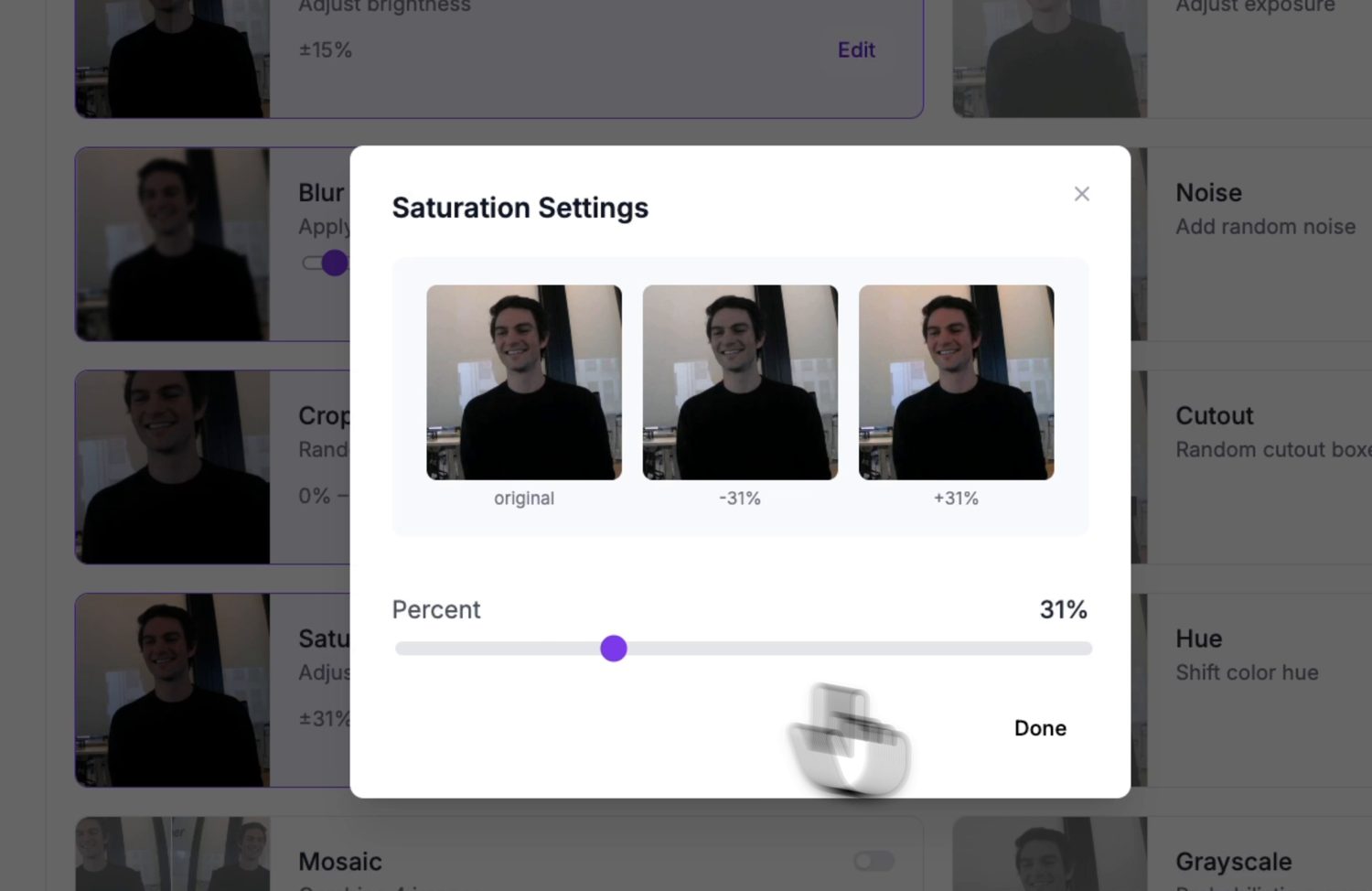
증강 미리보기: 각 옵션은 버전에 적용하기 전에 샘플 이미지에 어떤 효과를 주는지 보여줍니다.¶
카메라가 실제로 보게 될 변동에 증강을 맞추십시오. 밝기와 노출은 그만한 가치가 있습니다 – 조명은 끊임없이 변하기 때문입니다. 설정에서 결코 일어나지 않는 것은 건너뛰십시오. 고정 설치된 카메라는 수직 뒤집기를 절대 보지 않으므로, 뒤집기 증강은 데이터셋을 희석시킬 뿐입니다.
13.7.4.2. 아키텍처 선택하기¶
다음으로 모델 아키텍처를 고릅니다. Roboflow는 여러 가지를 제공하며, 각각 정확도와 속도를 맞바꾸는 크기 선택기를 갖추고 있습니다.
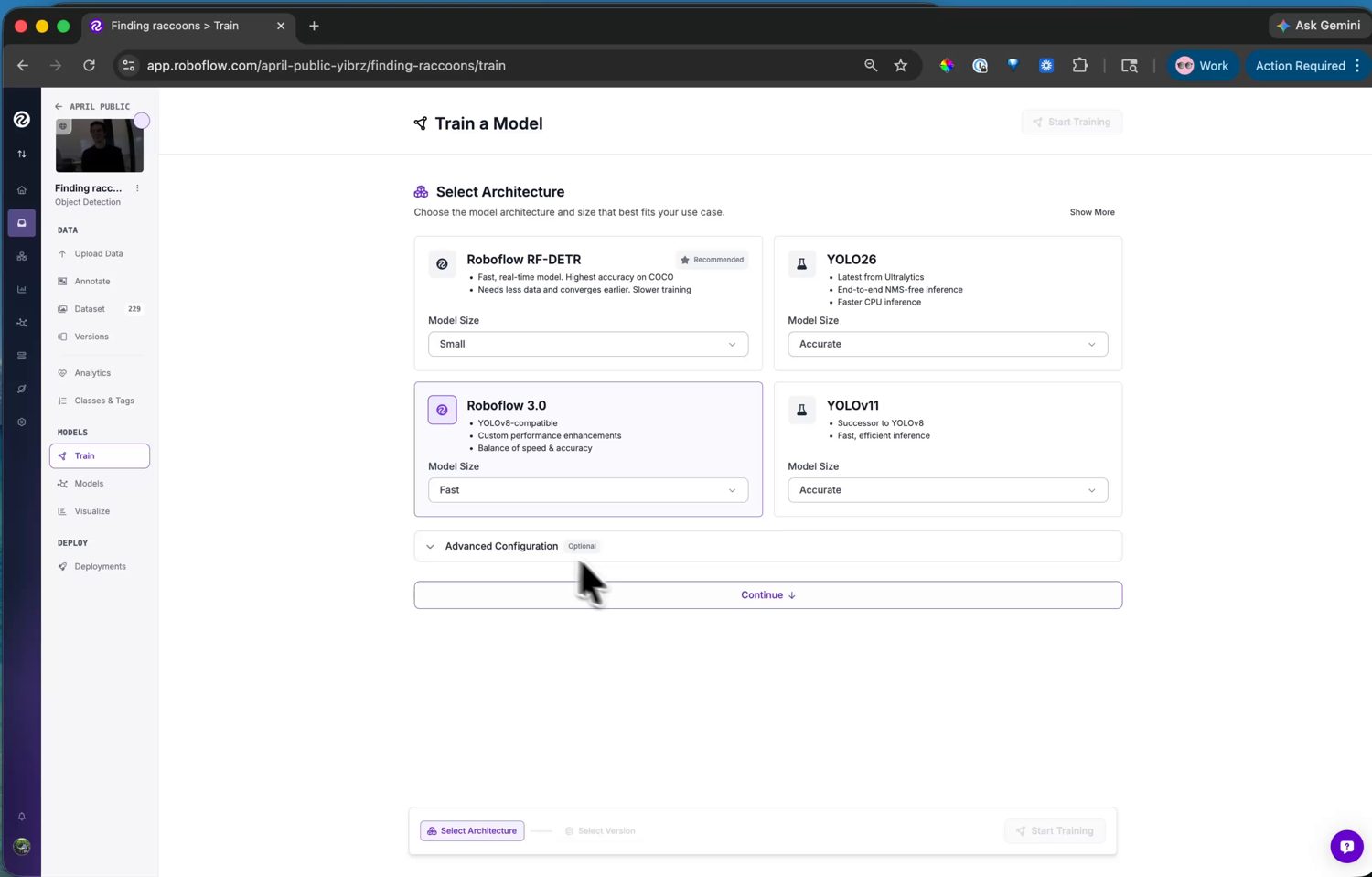
아키텍처 선택지 – 각각 정확도와 추론 속도를 맞바꾸는 크기 선택기를 갖추고 있습니다.¶
카메라에는 Roboflow 3.0 을 고르십시오. 내부적으로는 YOLOv8이며, 카메라는 ml.postprocessing.ultralytics 에 YOLOv8 후처리기를 함께 제공하므로, 그 출력은 사용자 측에서 추가 코드 없이 디코드됩니다. Fast 크기를 선택하십시오 – 카메라의 메모리에 맞고 쓸 만한 프레임 속도로 실행됩니다.
13.7.4.3. 학습 실행하기¶
실행을 시작하면 학습은 Roboflow의 서버에서 이루어집니다 – 작은 데이터셋의 경우 보통 한 시간이 훨씬 안 걸리며, 완료되면 이메일이 옵니다. 그 다음 버전 페이지에 학습 그래프와 정확도 지표가 표시됩니다: mAP, 정밀도(precision), 재현율(recall).

정확도 지표가 함께 표시된 학습된 모델. 여기서 Visualize 페이지는 빠른 정상 동작 확인을 위해 테스트 이미지나 웹캠에서 모델을 실행하기도 합니다.¶
수치가 좋으면 모델은 배포할 준비가 된 것입니다. 그렇지 않으면 보통 더 많거나 더 다양한 데이터로 해결합니다 – 또 다른 클립을 캡처하고, 레이블을 달고, 새 버전을 학습시키십시오.