13.7.4. Het model trainen¶
Met een gelabelde dataset in handen is het trainen een begeleide flow op de pagina Train: leg een datasetversie vast, kies een architectuur, en draag de run over aan de servers van Roboflow.
13.7.4.1. De datasetversie¶
Vóór het trainen bouwt Roboflow een dataset-versie – een bevroren momentopname van de afbeeldingen plus twee transformaties die onderweg worden toegepast:
Preprocessing schaalt elke afbeelding naar de resolutie waarop het model traint. Houd die resolutie klein: de camera draait kleine modellen, en een detector die op een bescheiden resolutie is getraind, past in het geheugen van de camera en draait snel.
Augmentation synthetiseert extra trainingsafbeeldingen door de originelen te verstoren – spiegelingen, helderheids- en belichtingsverschuivingen, vervaging, ruis. Elke augmentatie leert het model een echte variatie te tolereren die het op de camera zal tegenkomen, waardoor een kleine, met de hand vastgelegde dataset veel verder reikt.
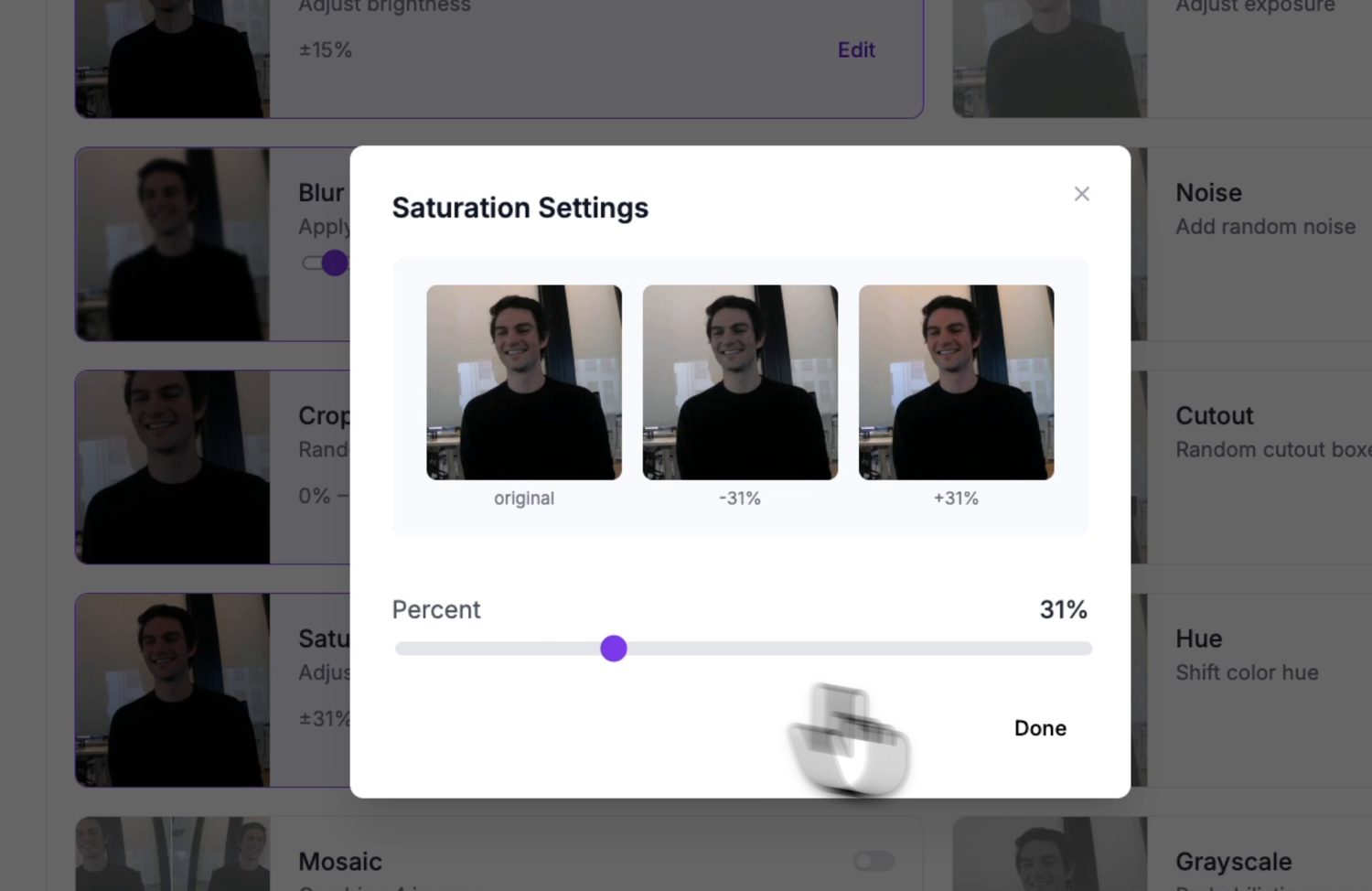
Een augmentatievoorbeeld: elke optie laat zien wat hij doet met een voorbeeldafbeelding voordat je hem aan de versie toewijst.¶
Stem de augmentaties af op variaties die de camera daadwerkelijk zal zien. Helderheid en belichting verdienen hun plek – de belichting verandert voortdurend. Sla degene over die in jouw opstelling nooit voorkomen; een camera die vastgeschroefd zit, ziet nooit een verticale spiegeling, dus spiegelingsaugmentatie verwatert de dataset alleen maar.
13.7.4.2. Een architectuur kiezen¶
Kies vervolgens de modelarchitectuur. Roboflow biedt er verschillende, elk met een groottekeuze die nauwkeurigheid afweegt tegen snelheid.
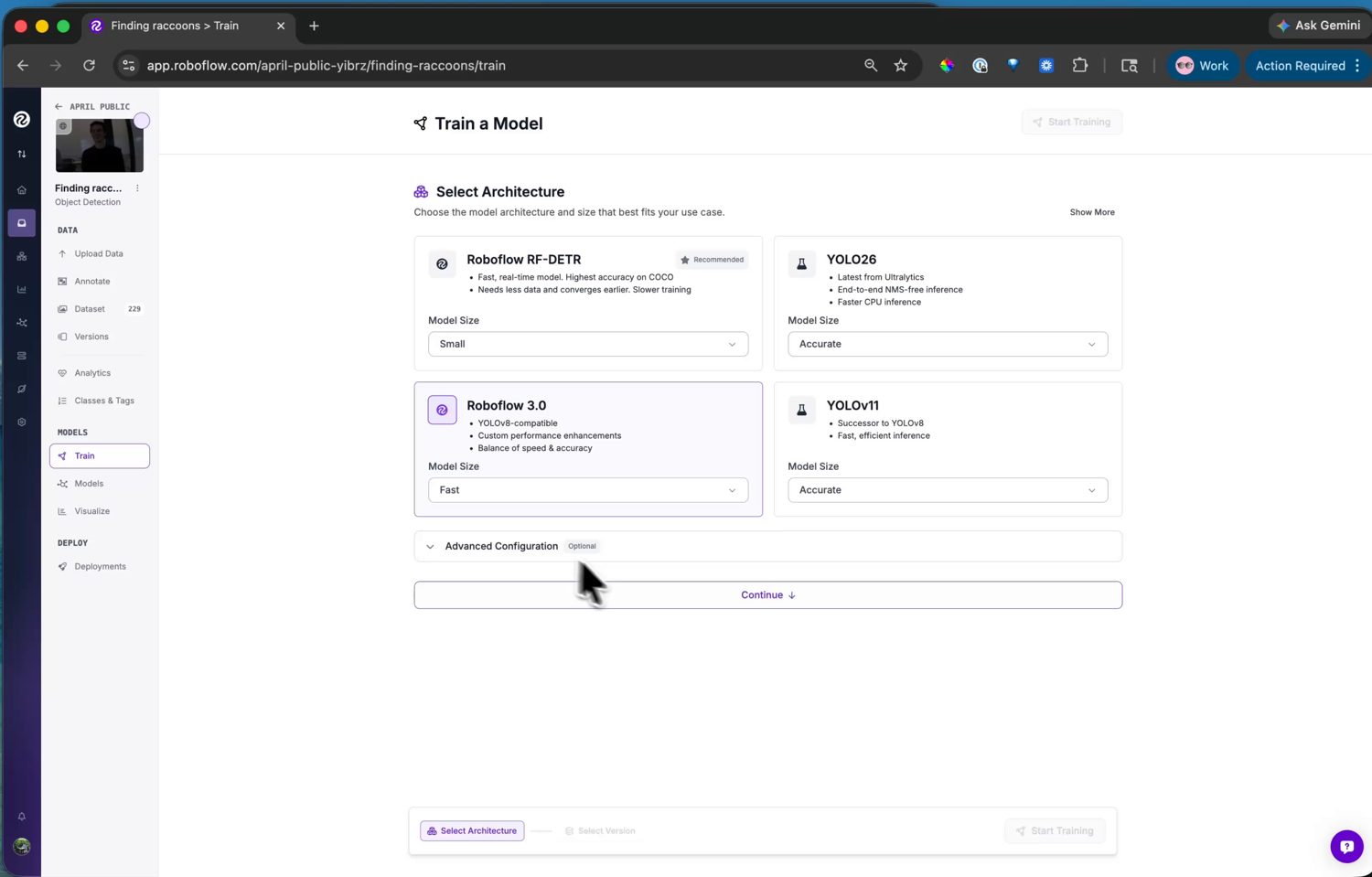
De architectuurkeuzes – elk met een groottekeuze die nauwkeurigheid afweegt tegen inferentiesnelheid.¶
Kies voor de camera Roboflow 3.0. Het is onder de motorkap YOLOv8, en de camera levert een YOLOv8-postprocessor mee in ml.postprocessing.ultralytics, zodat zijn uitvoer decodeert zonder extra code aan jouw kant. Kies de grootte Fast – die past in het geheugen van de camera en draait op een bruikbare framesnelheid.
13.7.4.3. De training uitvoeren¶
Start de run en de training gebeurt op de servers van Roboflow – meestal ruim onder een uur voor een kleine dataset, met een e-mail wanneer het klaar is. De versiepagina toont vervolgens de trainingsgrafieken en de nauwkeurigheidsmetrieken: mAP, precisie en recall.
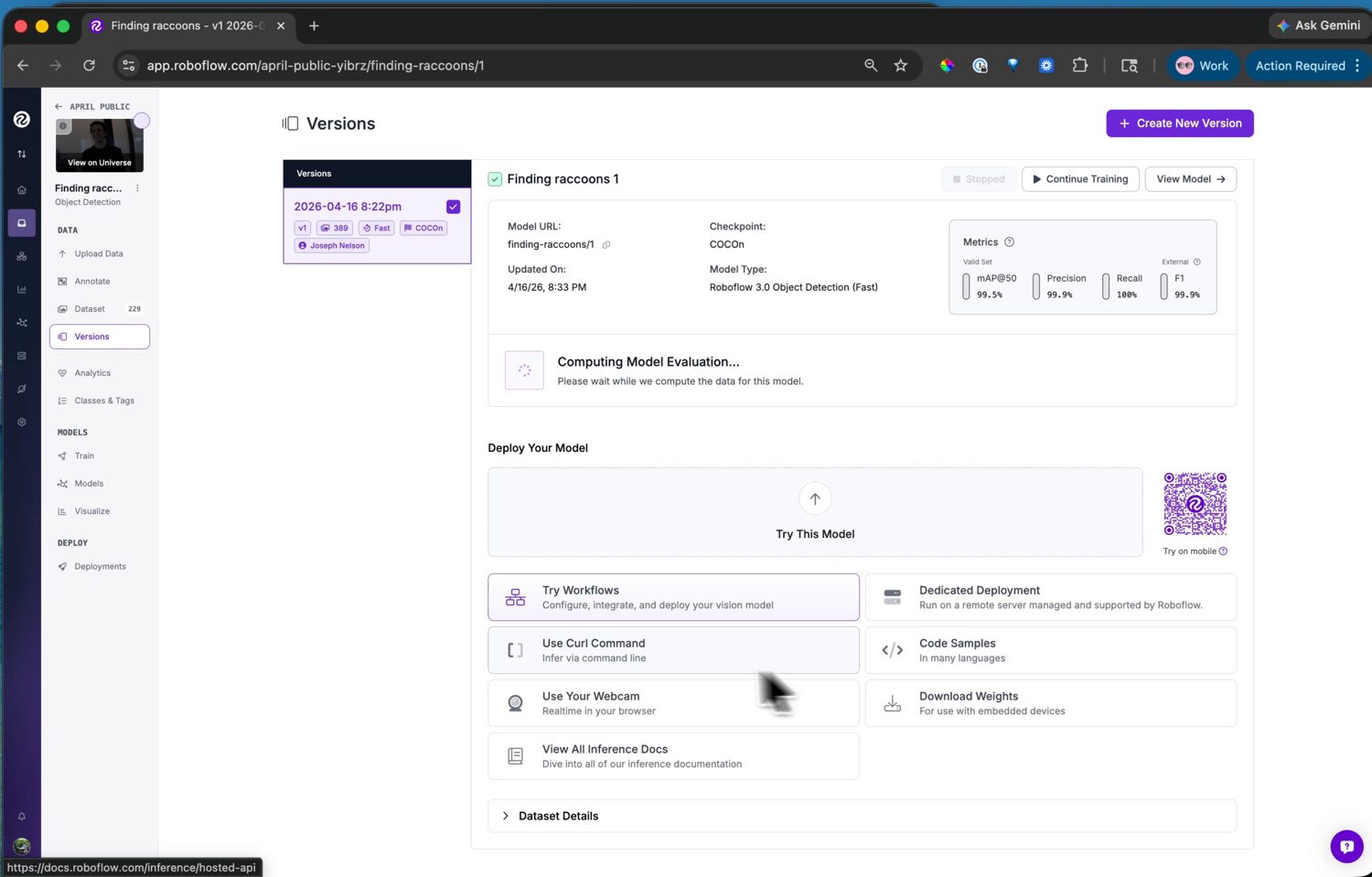
Het getrainde model met zijn nauwkeurigheidsmetrieken. Vanaf hier draait de pagina Visualize het ook op testafbeeldingen of een webcam voor een snelle controle.¶
Als de cijfers goed zijn, is het model klaar om te deployen. Zo niet, dan is de oplossing meestal meer of meer gevarieerde data – leg nog een clip vast, label het, en train een nieuwe versie.