13.7.5. Naar de camera deployen¶
Het getrainde model bevindt zich op de servers van Roboflow. Het op de camera krijgen vergt één download, gevolgd door dezelfde stappen als bij het laden van elk ander model.
13.7.5.1. De gewichten downloaden¶
Kies op de pagina Deployments voor Deploy to 3rd Party Platforms en selecteer het tabblad OpenMV. Het downloadt de gewichten van het model als één integer-gekwantiseerd .tflite-bestand, vernoemd naar het project en de versie – het int8-formaat dat de TFLite-engine van de camera uitvoert.
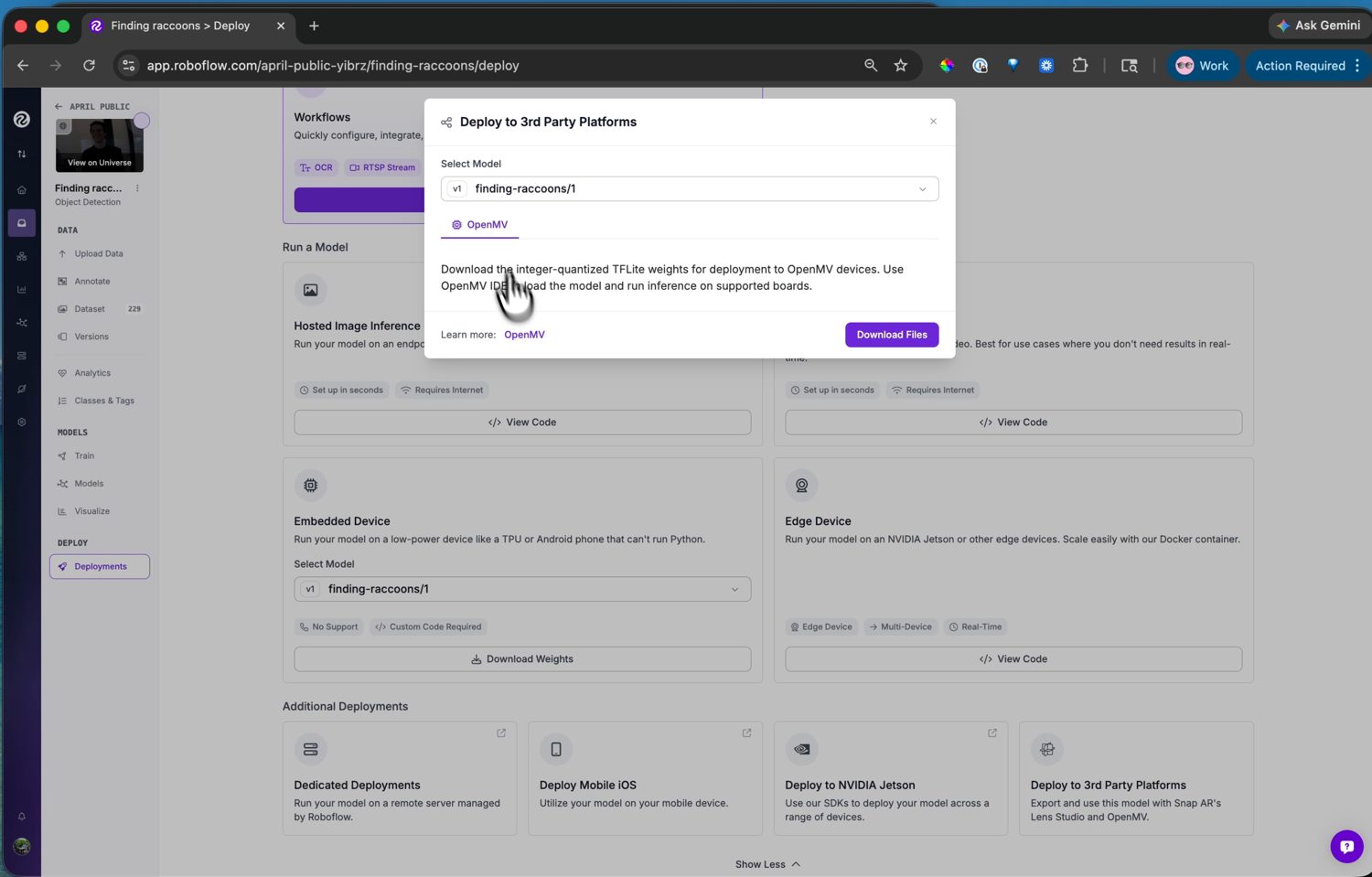
Het OpenMV-deploy-doel – Download Files slaat de camera-gerede .tflite-gewichten op.¶
13.7.5.2. Het op de camera laden¶
Voeg het .tflite-bestand toe aan de camera met de ROMFS-editor van de IDE, die het converteert voor de NPU van het board wanneer het board er een heeft, en laad het vervolgens in een script met ml.Model. Modellen draaien ook vanaf de flashschijf van de camera – kopieer het bestand erheen en wijs ml.Model naar het pad – maar ROMFS is de betere plek: modellen daar voeren rechtstreeks vanuit het flashgeheugen uit zonder RAM-kopie.
De ruwe uitvoer van een detectiemodel is een tensor met box-coördinaten en klassescores die nog gedecodeerd moet worden. Roboflow’s detectoren uit de YOLO-familie decoderen met de postprocessors die de camera meelevert in ml.postprocessing.ultralytics, dus een paar regels koppelen het model aan zijn decoder en je hebt vakken en labels.
Zie ook
Het hoofdstuk over machine learning voor het draaien van modellen met de ml-module – laden, de inferentiepijplijn, en de stapsgewijze uitleg over het decoderen van YOLO-familie-uitvoer.