13.7.5. Desplegar en la cámara¶
El modelo entrenado reside en los servidores de Roboflow. Llevarlo a la cámara requiere una descarga y luego los mismos pasos que para cargar cualquier otro modelo.
13.7.5.1. Descargar los pesos¶
En la página Deployments, elige Deploy to 3rd Party Platforms y selecciona la pestaña OpenMV. Descarga los pesos del modelo como un único archivo .tflite cuantizado a enteros, nombrado según el proyecto y la versión – el formato int8 que ejecuta el motor TFLite de la cámara.
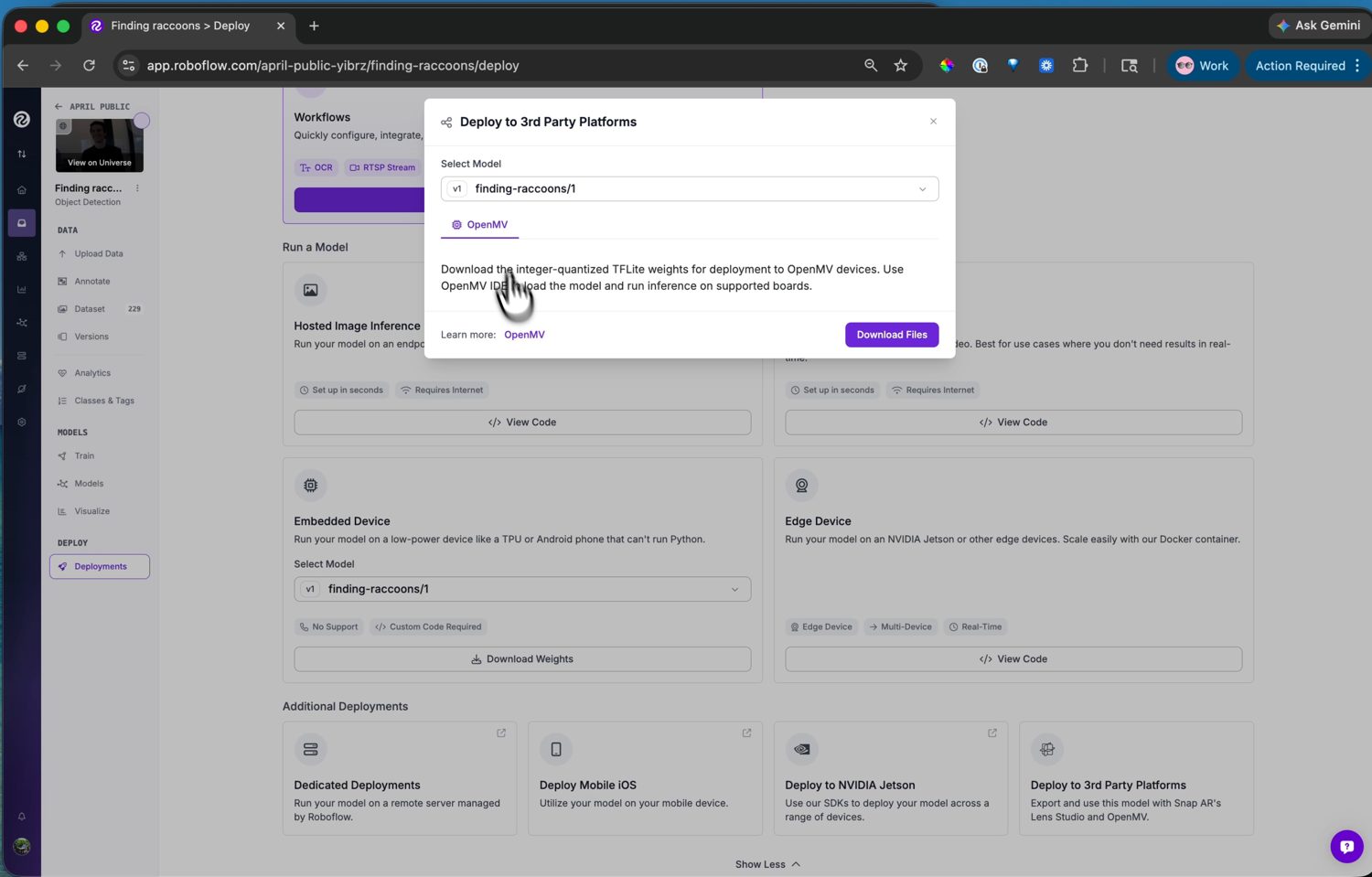
El destino de despliegue OpenMV – Download Files guarda los pesos .tflite listos para la cámara.¶
13.7.5.2. Cargarlo en la cámara¶
Añade el archivo .tflite a la cámara con el editor de ROMFS del IDE, que lo convierte para la NPU de la placa cuando esta dispone de una, y luego cárgalo en un script con ml.Model. Los modelos también se ejecutan desde la unidad flash de la cámara – copia el archivo y apunta ml.Model a la ruta – pero ROMFS es el mejor lugar: los modelos que residen allí se ejecutan directamente desde la memoria flash sin una copia en RAM.
La salida en bruto de un modelo de detección es un tensor de coordenadas de cuadros y puntuaciones de clase que aún necesita decodificación. Los detectores de la familia YOLO de Roboflow se decodifican con los postprocesadores que la cámara incluye en ml.postprocessing.ultralytics, así que unas pocas líneas conectan el modelo con su decodificador y obtienes cuadros y etiquetas.
Ver también
El capítulo sobre aprendizaje automático para ejecutar modelos con el módulo ml – la carga, el pipeline de inferencia y el recorrido por la decodificación de la salida de la familia YOLO.