13.7.5. 部署到相機¶
訓練好的模型存放於 Roboflow 的伺服器上。要把它放到相機上需要一次下載,接著就是與載入任何其他模型相同的步驟。
13.7.5.1. 下載權重¶
在 Deployments 頁面上,選擇 Deploy to 3rd Party Platforms 並選取 OpenMV 分頁。它會將模型權重下載為單一的整數量化 .tflite 檔案,以專案與版本命名——這正是相機 TFLite 引擎所執行的 int8 格式。
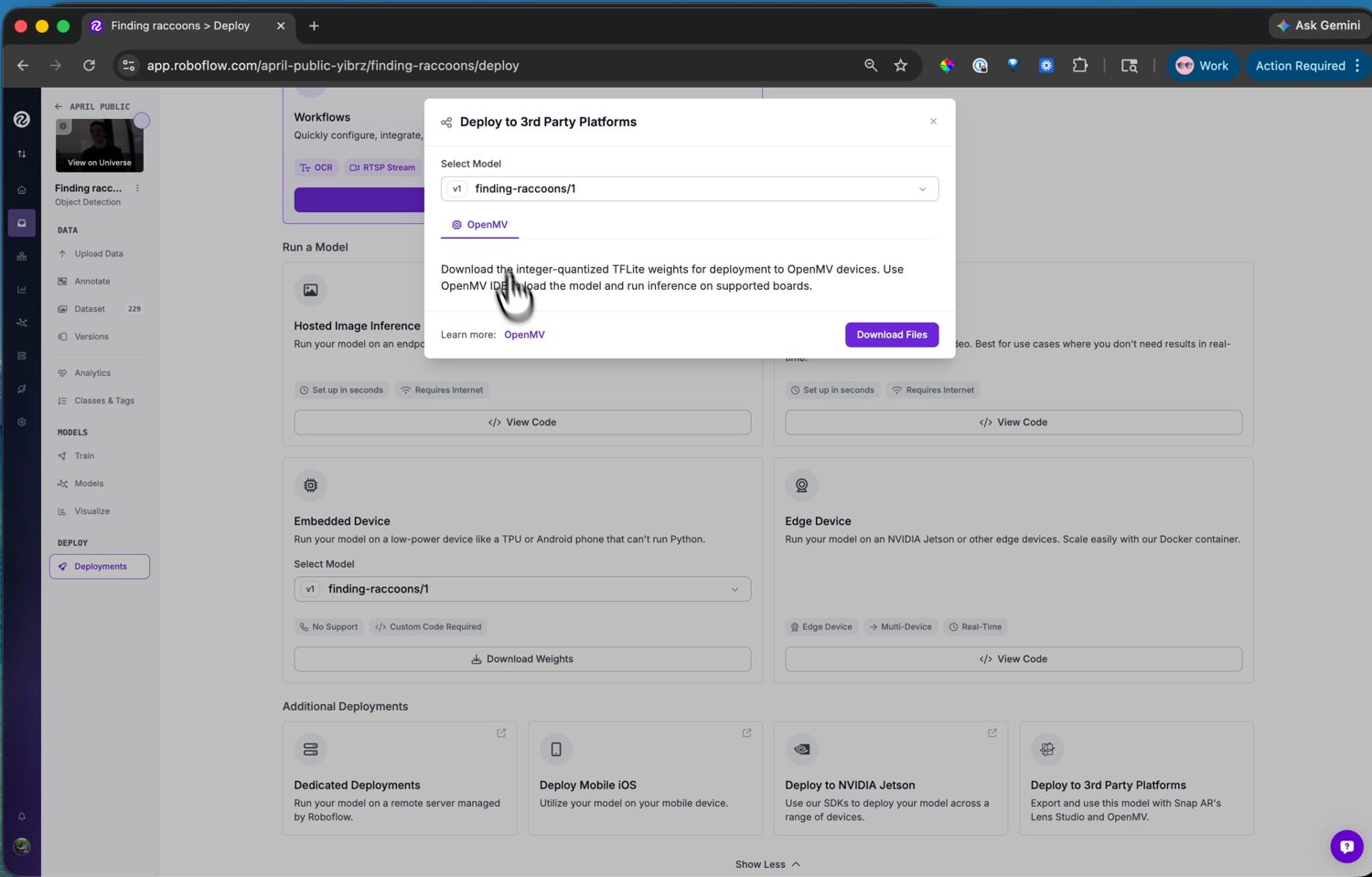
OpenMV 部署目標——Download Files 會儲存可供相機使用的 .tflite 權重。¶
13.7.5.2. 在相機上載入它¶
使用 IDE 的 ROMFS 編輯器 將 .tflite 檔案加入相機,當開發板配備 NPU 時,它會為開發板的 NPU 進行轉換,接著在指令碼中以 ml.Model 載入它。模型也可以從相機的快閃磁碟機執行——將檔案複製過去,並讓 ml.Model 指向該路徑——但 ROMFS 是更好的存放位置:放在那裡的模型可直接從快閃記憶體執行,無需 RAM 複本。
偵測模型的原始輸出是一個由方框座標與類別分數構成的張量,仍需要解碼。Roboflow 的 YOLO 系列偵測器可使用相機隨附於 ml.postprocessing.ultralytics 中的後處理器來解碼,因此只需幾行程式碼就能將模型接上其解碼器,你便能得到方框與標籤。
請參閱
機器學習章節 說明如何以 ml 模組執行模型——載入、推論管線,以及 YOLO 系列輸出解碼的逐步說明。