13.7.5. Distribuera till kameran¶
Den tränade modellen ligger på Roboflows servrar. Att få den till kameran kräver en nedladdning, och sedan samma steg som för att ladda vilken annan modell som helst.
13.7.5.1. Ladda ner vikterna¶
På sidan Deployments, välj Deploy to 3rd Party Platforms och välj fliken OpenMV. Den laddar ner modellens vikter som en enda heltalskvantiserad .tflite-fil, namngiven efter projektet och versionen – int8-formatet som kamerans TFLite-motor kör.
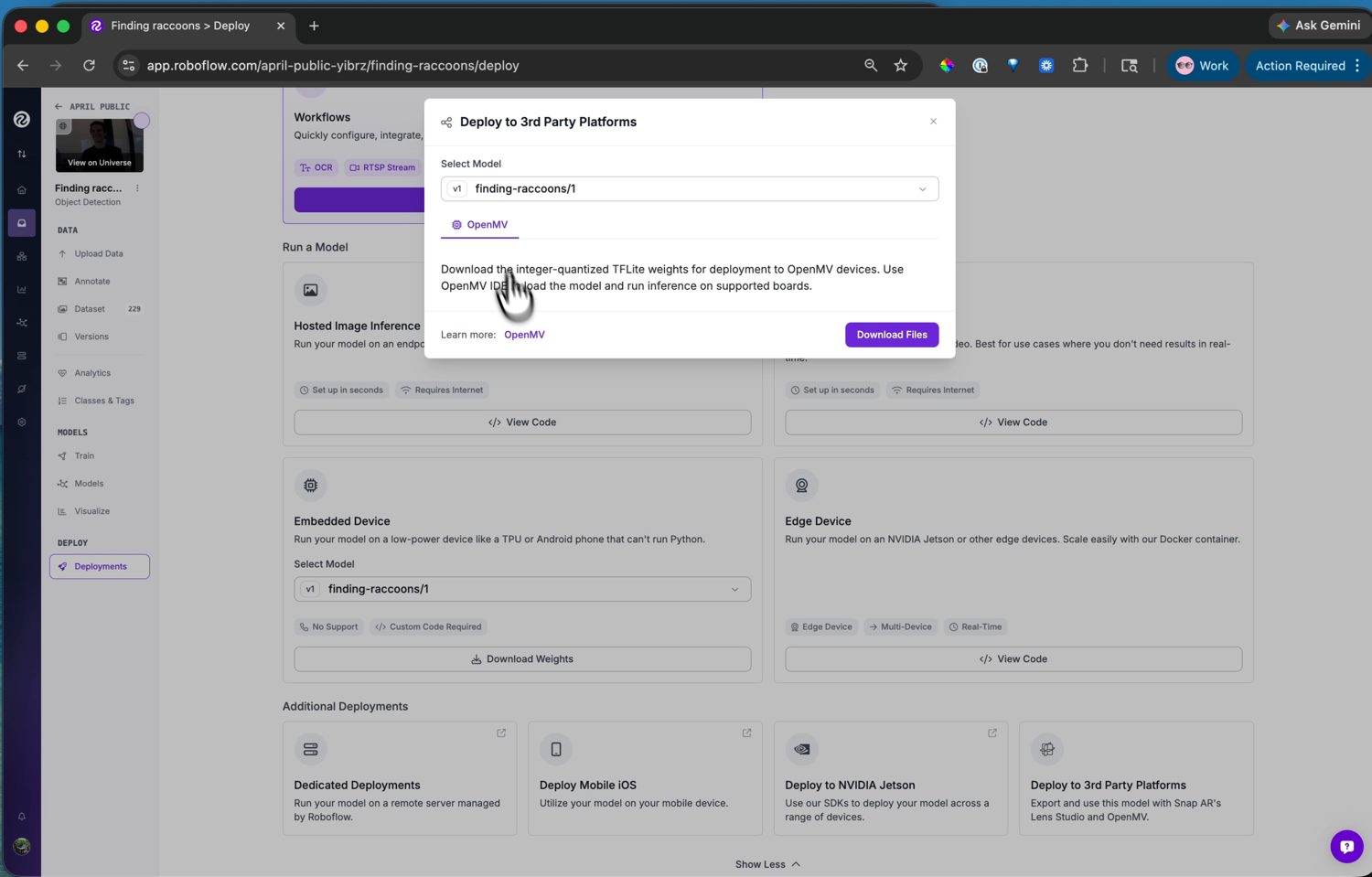
Distributionsmålet OpenMV – Download Files sparar de kamera-redo .tflite-vikterna.¶
13.7.5.2. Ladda den på kameran¶
Lägg till .tflite-filen på kameran med IDE:ns ROMFS-redigerare, som konverterar den för kortets NPU när kortet har en sådan, och ladda den sedan i ett skript med ml.Model. Modeller kan också köras från kamerans flashenhet – kopiera över filen och peka ml.Model på sökvägen – men ROMFS är det bättre hemmet: modeller där exekverar direkt från flashminnet utan en RAM-kopia.
En detekteringsmodells råa utdata är en tensor med rutkoordinater och klasspoäng som fortfarande behöver avkodas. Roboflows detektorer i YOLO-familjen avkodas med efterbehandlarna som kameran levererar i ml.postprocessing.ultralytics, så några rader kopplar modellen till dess avkodare och du har rutor och etiketter.
Se även
Kapitlet om maskininlärning för att köra modeller med modulen ml – laddning, inferenspipelinen och genomgången av att avkoda utdata från YOLO-familjen.