13.7.5. Käyttöönotto kameralla¶
Koulutettu malli sijaitsee Roboflow’n palvelimilla. Sen saaminen kameralle vaatii yhden latauksen ja sitten samat vaiheet kuin minkä tahansa muun mallin lataaminen.
13.7.5.1. Painojen lataaminen¶
Valitse Deployments-sivulla Deploy to 3rd Party Platforms ja valitse OpenMV-välilehti. Se lataa mallin painot yhtenä kokonaisluvuiksi kvantisoituna .tflite -tiedostona, joka on nimetty projektin ja version mukaan – int8-muoto, jota kameran TFLite-moottori suorittaa.
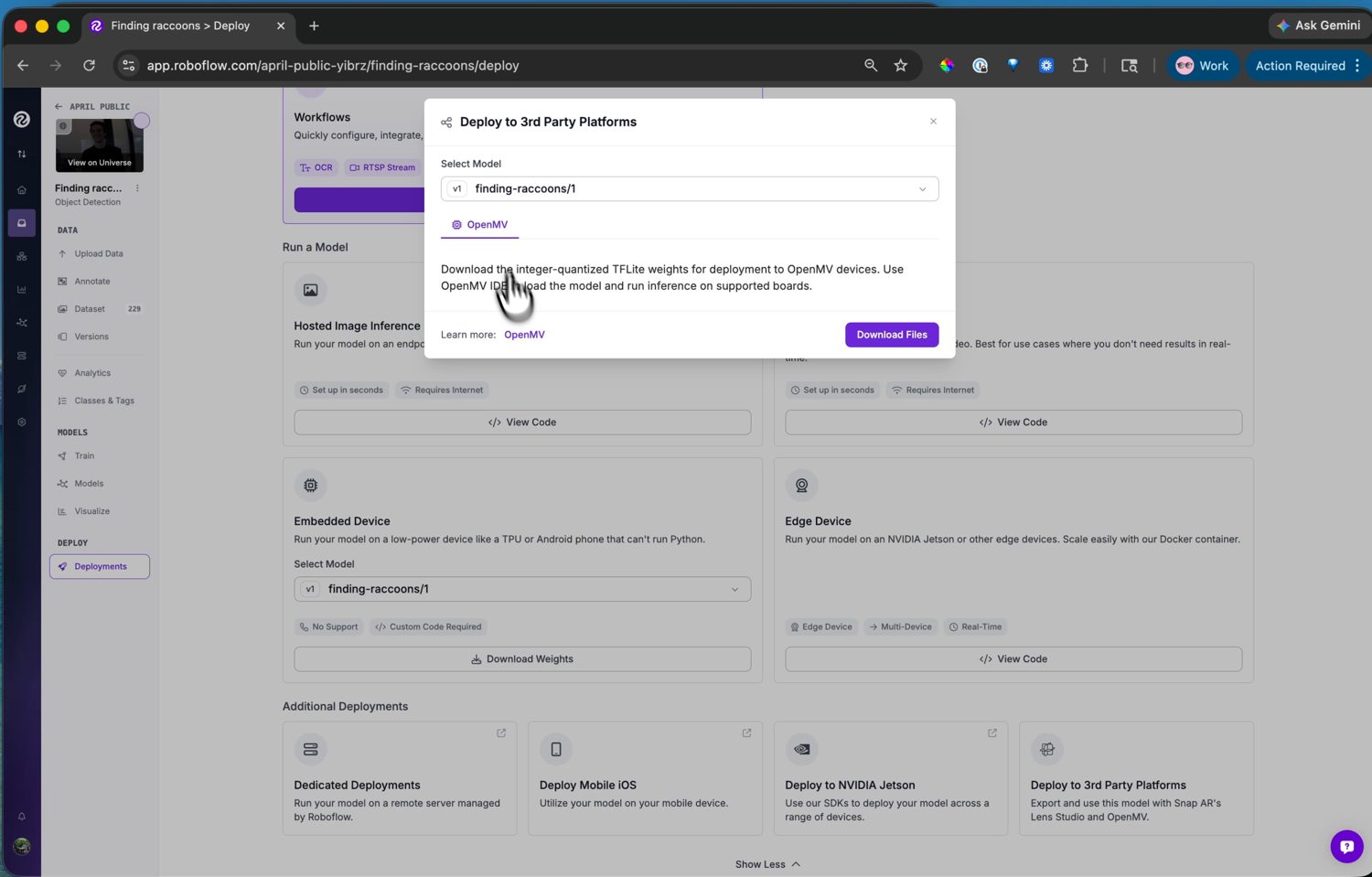
OpenMV-käyttöönottokohde – Download Files tallentaa kameralle valmiit .tflite -painot.¶
13.7.5.2. Sen lataaminen kameralle¶
Lisää .tflite -tiedosto kameralle IDE:n ROMFS-editorilla, joka muuntaa sen kortin NPU:lle, kun kortissa sellainen on, ja lataa se sitten skriptissä ml.Model -luokalla. Mallit toimivat myös kameran flash-asemalta – kopioi tiedosto sinne ja osoita ml.Model polkuun – mutta ROMFS on parempi paikka: siellä olevat mallit suoritetaan suoraan flash-muistista ilman RAM-kopiota.
Tunnistusmallin raakatuloste on tensori, joka sisältää laatikon koordinaatit ja luokkapisteet ja jota täytyy vielä dekoodata. Roboflow’n YOLO-perheen tunnistimet dekoodataan jälkikäsittelijöillä, jotka kamera toimittaa ml.postprocessing.ultralytics -moduulissa, joten muutama rivi kytkee mallin dekoodaajaansa ja saat laatikot ja luokkanimet.
Katso myös
Koneoppimisluku mallien suorittamiseen ml -moduulilla – lataaminen, päättelyputki ja läpikäynti YOLO-perheen tulosteen dekoodaamisesta.