13.7.5. Nasazení do kamery¶
Natrénovaný model žije na serverech Roboflow. Jeho dostání do kamery vyžaduje jedno stažení a poté stejné kroky jako načtení jakéhokoli jiného modelu.
13.7.5.1. Stažení vah¶
Na stránce Deployments zvolte Deploy to 3rd Party Platforms a vyberte záložku OpenMV. Stáhnou se váhy modelu jako jediný celočíselně kvantizovaný soubor .tflite pojmenovaný podle projektu a verze – formát int8, který spouští TFLite engine kamery.
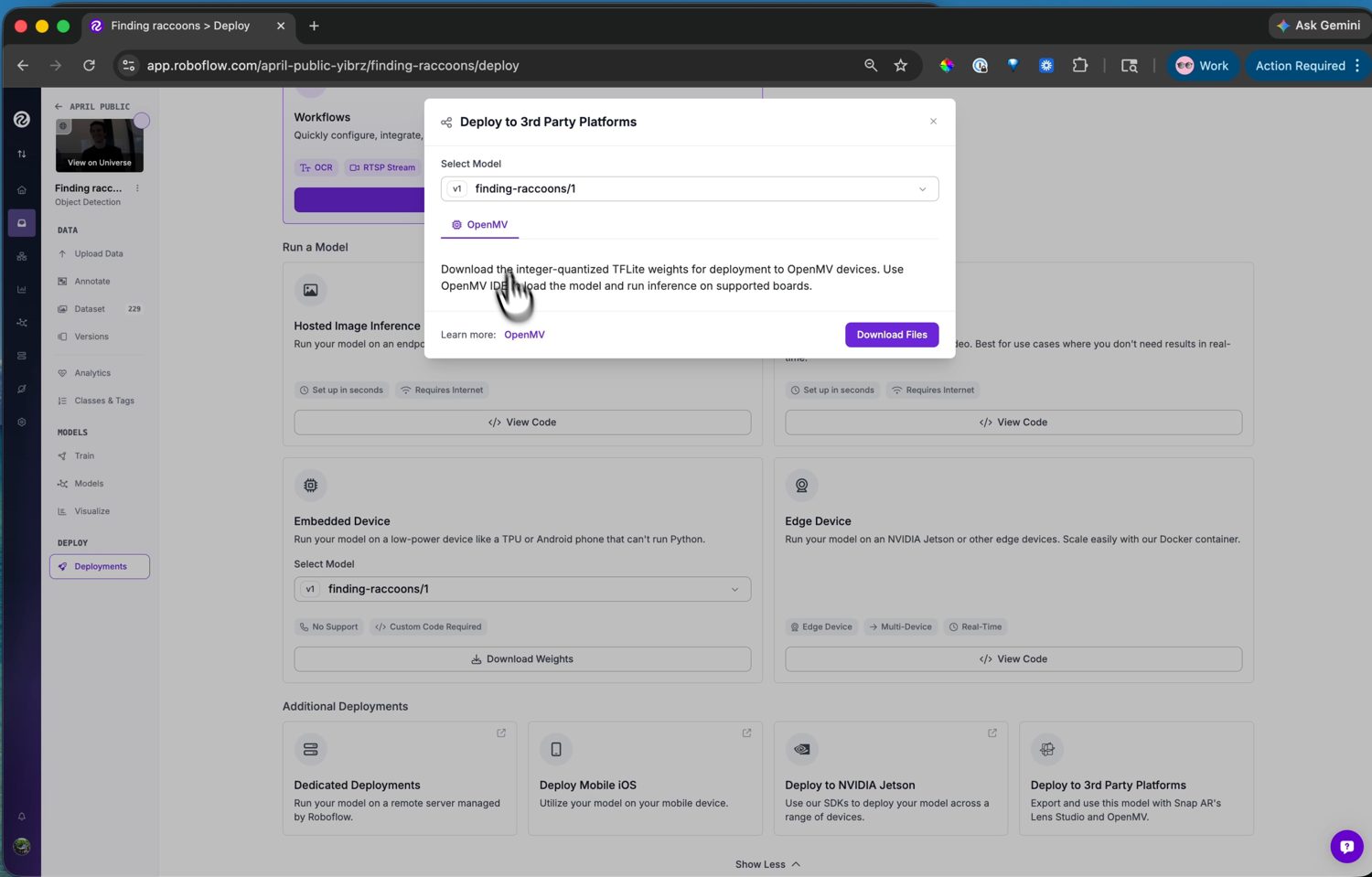
Cíl nasazení OpenMV – Download Files uloží váhy .tflite připravené pro kameru.¶
13.7.5.2. Načtení v kameře¶
Přidejte soubor .tflite do kamery pomocí editoru ROMFS v IDE, který jej převede pro NPU desky, pokud jím deska disponuje, a poté jej načtěte ve skriptu pomocí ml.Model. Modely lze spouštět i z flash disku kamery – zkopírujte soubor a nasměrujte ml.Model na cestu – ale ROMFS je lepší domov: modely tam uložené se spouštějí přímo z flash paměti bez kopie do RAM.
Surový výstup detekčního modelu je tenzor souřadnic rámečků a skóre tříd, který stále vyžaduje dekódování. Detektory rodiny YOLO od Roboflow dekódují pomocí post-procesorů, které kamera dodává v ml.postprocessing.ultralytics, takže několik řádků propojí model s jeho dekodérem a máte rámečky a štítky.
Viz také
Kapitola o strojovém učení pro spouštění modelů pomocí modulu ml – načítání, inferenční řetězec a průchod dekódováním výstupu rodiny YOLO.