13.7.5. Telepítés a kamerára¶
A betanított modell a Roboflow szerverein található. A kamerára juttatásához egyetlen letöltés kell, majd ugyanazok a lépések, mint bármely más modell betöltésénél.
13.7.5.1. A súlyok letöltése¶
A Deployments oldalon válaszd a Deploy to 3rd Party Platforms lehetőséget, majd jelöld ki az OpenMV fület. Ez egyetlen egész számra kvantált .tflite fájlként tölti le a modell súlyait, a projektről és a verzióról elnevezve – ez az int8 formátum, amelyet a kamera TFLite motorja futtat.
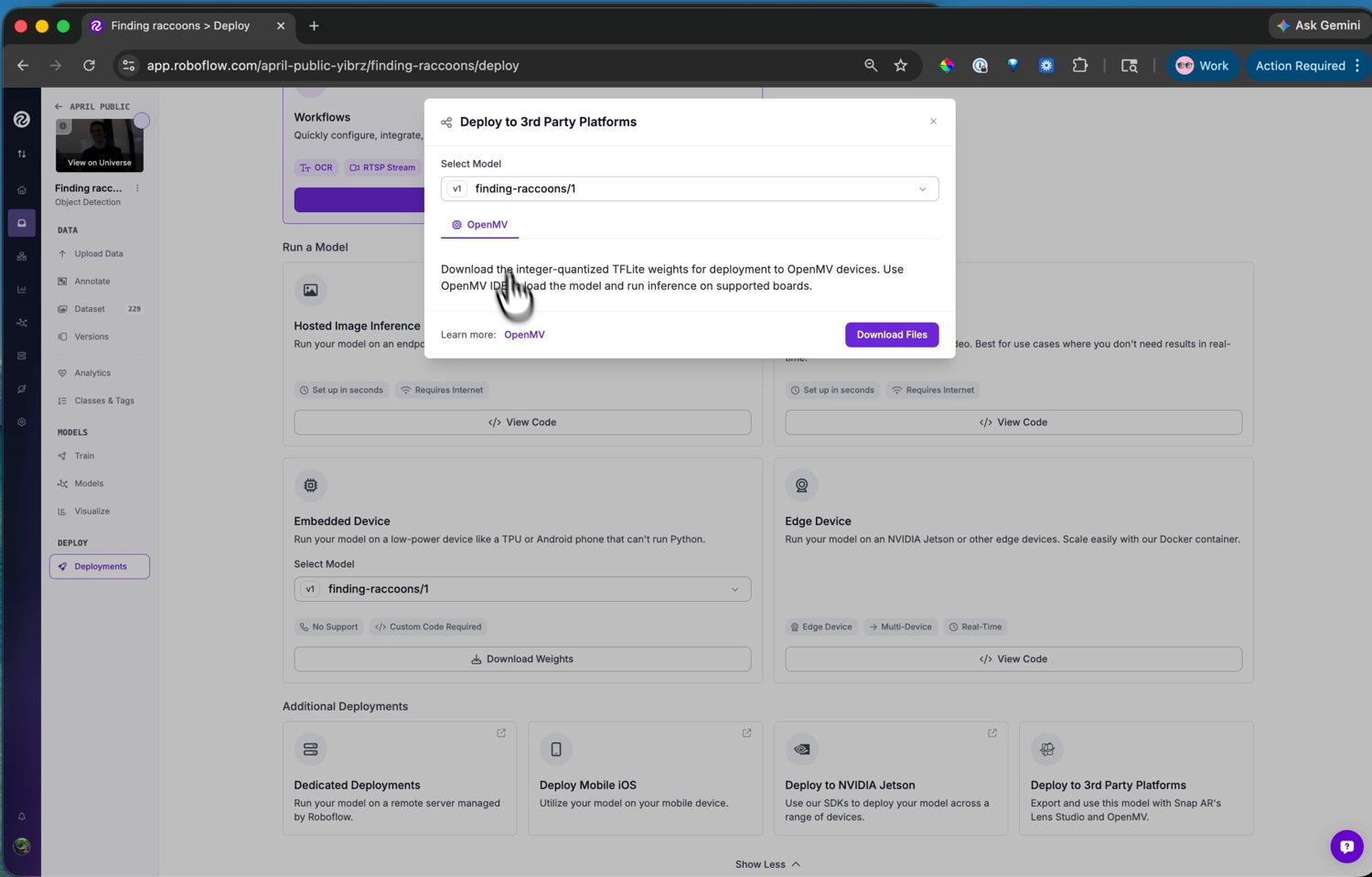
Az OpenMV telepítési cél – a Download Files menti a kamerára kész .tflite súlyokat.¶
13.7.5.2. Betöltés a kamerára¶
Add hozzá a .tflite fájlt a kamerához az IDE ROMFS szerkesztőjével, amely átalakítja a kártya NPU-ja számára, ha a kártya rendelkezik ilyennel, majd töltsd be egy szkriptben az ml.Model segítségével. A modellek a kamera flash meghajtójáról is futnak – másold át a fájlt, és irányítsd az ml.Model objektumot az elérési útra –, de a ROMFS a jobb hely: az ott lévő modellek közvetlenül a flash memóriából futnak, RAM-másolat nélkül.
Egy észlelési modell nyers kimenete a doboz-koordináták és osztálypontszámok tenzora, amely még dekódolásra szorul. A Roboflow YOLO-családú észlelői a kamera által szállított, az ml.postprocessing.ultralytics modulban lévő utófeldolgozókkal dekódolnak, így néhány sor összeköti a modellt a dekóderével, és máris megvannak a dobozok és címkék.
Lásd még
A gépi tanulásról szóló fejezet a modellek ml modullal való futtatásáról – betöltés, a következtetési csővezeték, valamint a YOLO-családú kimenet dekódolásának áttekintése.