13.7.4. Treniranje modela¶
S označenim skupom podataka u ruci, treniranje je vođeni tijek na stranici Train: učvrstite verziju skupa podataka, odaberite arhitekturu i predajte izvođenje Roboflowovim poslužiteljima.
13.7.4.1. Verzija skupa podataka¶
Prije treniranja, Roboflow izrađuje verziju skupa podataka – zamrznutu snimku slika uz dvije transformacije primijenjene usput:
Preprocessing mijenja veličinu svake slike na razlučivost na kojoj se model trenira. Neka ta razlučivost bude mala: kamera izvodi male modele, a detektor treniran na skromnoj razlučivosti stane u memoriju kamere i brzo se izvodi.
Augmentation sintetizira dodatne slike za treniranje perturbiranjem izvornika – zrcaljenja, pomaci svjetline i ekspozicije, zamućenje, šum. Svaka augmentacija uči model da tolerira stvarnu varijaciju na koju će naići na kameri, što mali ručno snimljeni skup podataka rasteže znatno dalje.
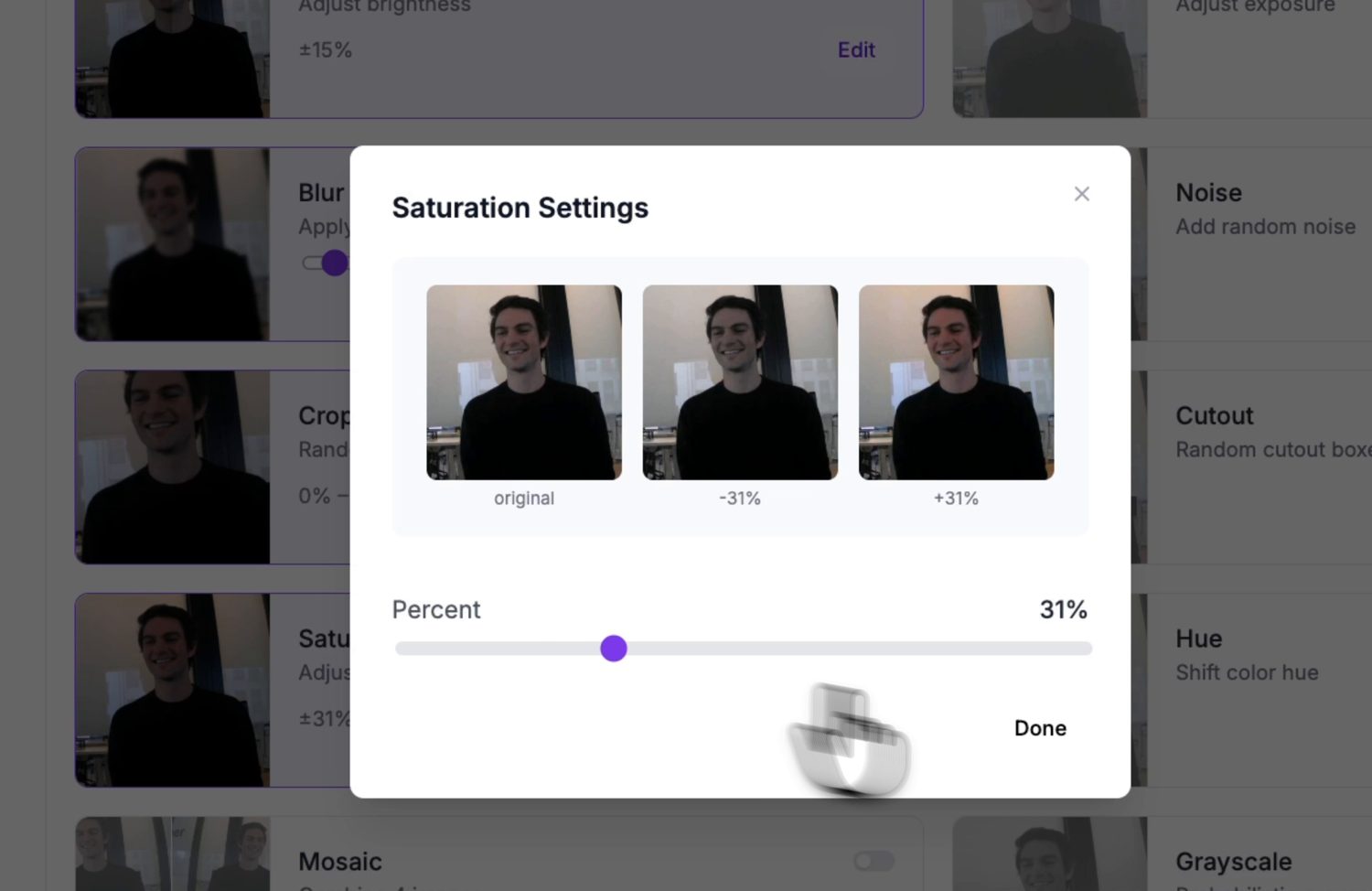
Pregled augmentacije: svaka opcija pokazuje što čini uzorku slike prije nego što je primijenite na verziju.¶
Uskladite augmentacije s varijacijama koje će kamera doista vidjeti. Svjetlina i ekspozicija zaslužuju svoje mjesto – osvjetljenje se neprestano mijenja. Preskočite one koje se nikada ne događaju u vašoj postavi; kamera učvršćena na mjestu nikada ne vidi okomito zrcaljenje, pa augmentacija zrcaljenjem samo razrjeđuje skup podataka.
13.7.4.2. Odabir arhitekture¶
Zatim odaberite arhitekturu modela. Roboflow nudi nekoliko, svaku s biračem veličine koji zamjenjuje točnost za brzinu.
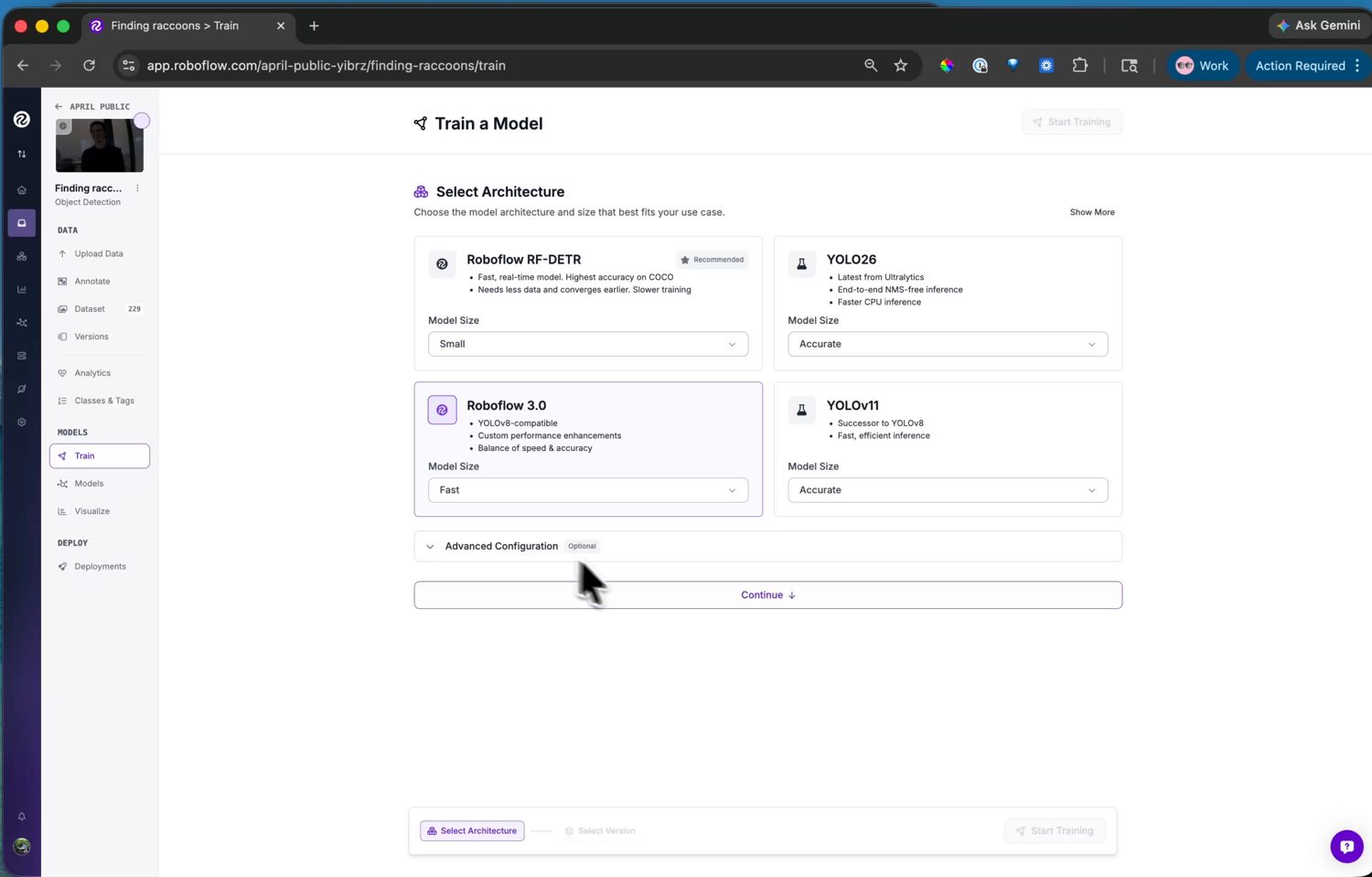
Izbori arhitekture – svaki s biračem veličine koji zamjenjuje točnost za brzinu zaključivanja.¶
Za kameru odaberite Roboflow 3.0. U pozadini je YOLOv8, a kamera isporučuje YOLOv8 post-procesor u ml.postprocessing.ultralytics, pa se njegov izlaz dekodira bez ikakvog dodatnog koda s vaše strane. Odaberite veličinu Fast – stane u memoriju kamere i izvodi se uporabljivom brzinom sličica.
13.7.4.3. Pokretanje treniranja¶
Pokrenite izvođenje i treniranje se odvija na Roboflowovim poslužiteljima – obično znatno manje od sata za mali skup podataka, uz e-poštu kada je gotovo. Stranica verzije zatim prikazuje grafove treniranja i mjere točnosti: mAP, preciznost i odziv.
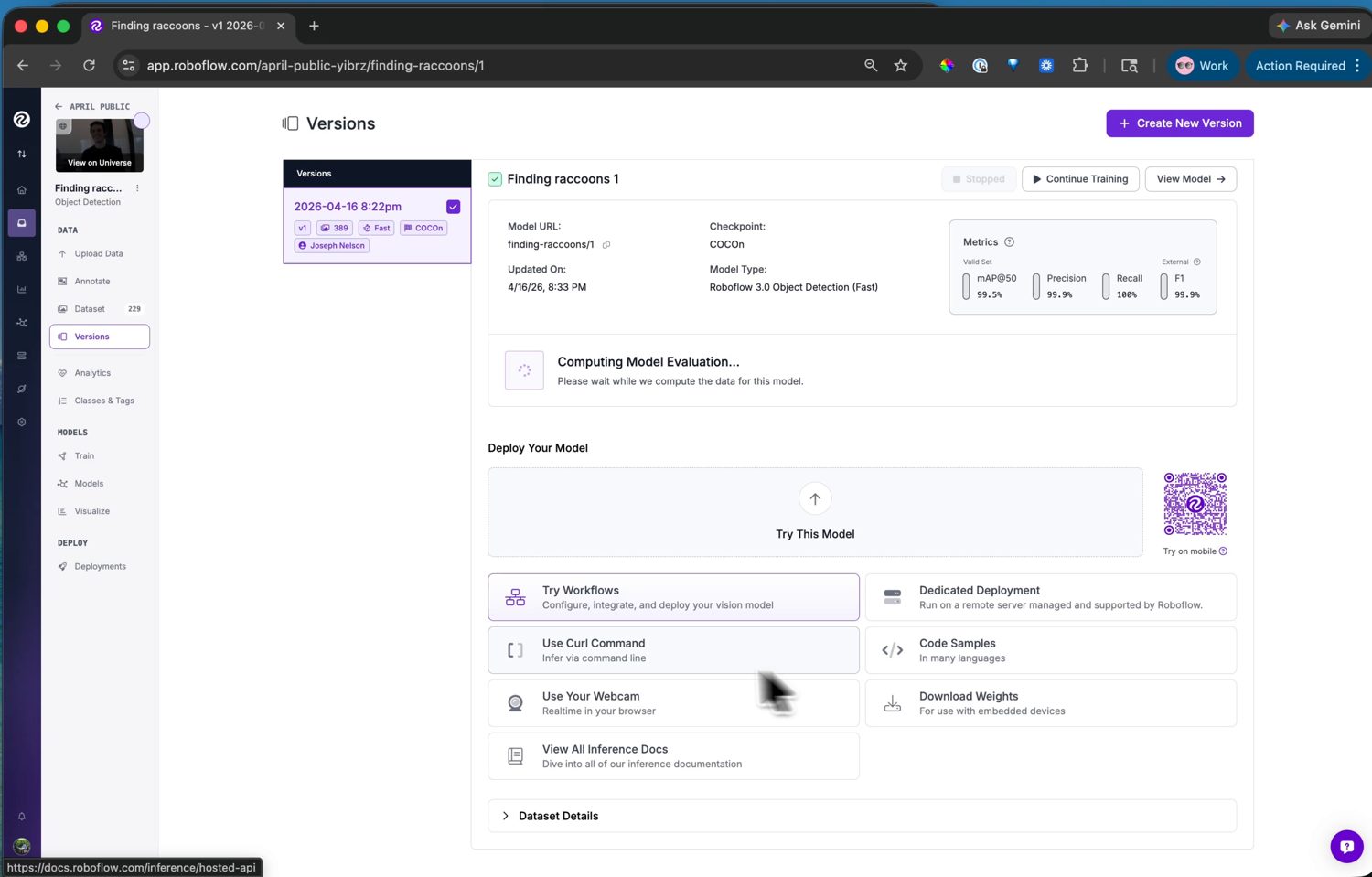
Trenirani model s njegovim mjerama točnosti. Odavde Visualize stranica također ga izvodi na testnim slikama ili web kameri radi brze provjere ispravnosti.¶
Ako su brojke dobre, model je spreman za postavljanje. Ako nisu, rješenje je obično više ili raznovrsnijih podataka – snimite još jedan isječak, označite ga i trenirajte novu verziju.