Arduino Nano RP2040 Connect¶
Aviso
Esta placa já não tem suporte. A última versão do firmware OpenMV para o Arduino Nano RP2040 Connect é a 4.7.0. Não serão lançadas mais atualizações de firmware, correções de erros ou novas funcionalidades para este alvo. A informação abaixo é preservada para utilizadores que executem a versão 4.7.0 ou anterior.
O Arduino Nano RP2040 Connect é uma placa no formato Arduino Nano de 45 × 18 mm construída em torno do Raspberry Pi RP2040 — um processador ARM Cortex‑M0+ duplo a 133 MHz com 264 KB de SRAM interna. O Wi‑Fi e BLE são fornecidos por um módulo U‑blox NINA‑W102, e a placa inclui um IMU LSM6DSOX de 6 eixos e um microfone PDM MP34DT06. O firmware OpenMV gere todos estes componentes a partir do MicroPython.
Para a ficha técnica completa, fotografias e dimensões, consulte a página do produto Arduino Nano RP2040 Connect.
Destaques¶
Raspberry Pi RP2040 ARM Cortex‑M0+ duplo a 133 MHz com 264 KB de SRAM interna.
16 MB de flash QSPI externa.
Módulo U‑blox NINA‑W102 que fornece Wi‑Fi 2.4 GHz b/g/n e Bluetooth 4.2 (BR/EDR + LE).
IMU LSM6DSOX de 6 eixos e microfone PDM MP34DT06.
Conector Micro USB para alimentação, programação e um REPL CDC.
22 pinos de E/S de utilizador nos cabeçalhos Nano padrão —
TX/RX,D2–D13(digitais),A0–A7(analógicos).
Pinout¶
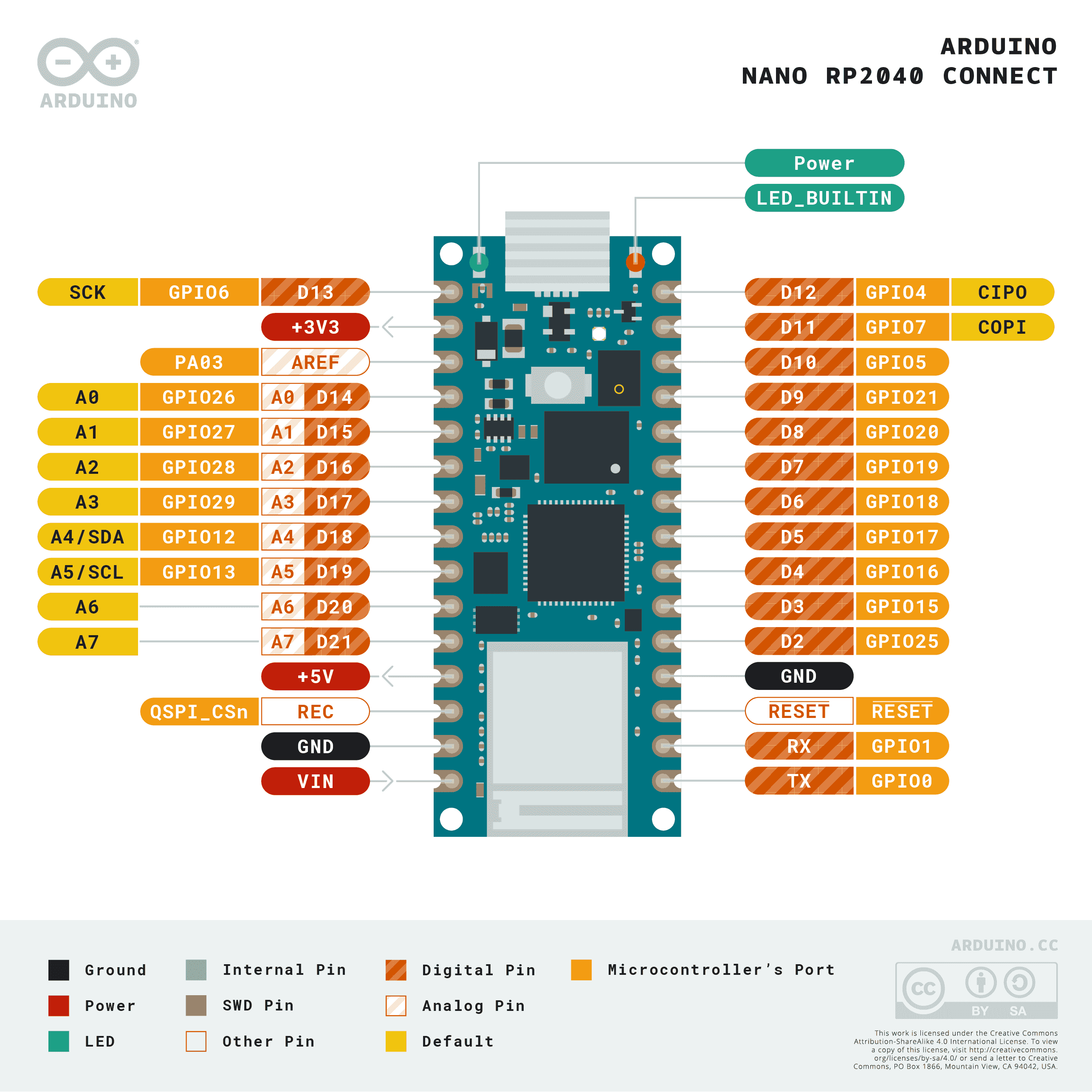
Referência de pinos¶
Nome do pino |
Referência |
Função |
|---|---|---|
TX |
3.3 V |
UART0 TX / SPI0 RX / I2C0 SDA / PWM0 A |
RX |
3.3 V |
UART0 RX / SPI0 CS / I2C0 SCL / PWM0 B |
D2 |
3.3 V |
SPI1 CS / UART1 RX / I2C0 SCL / PWM4 B |
D3 |
3.3 V |
SPI1 TX / UART0 RTS / I2C1 SCL / PWM7 B |
D4 |
3.3 V |
SPI0 RX / UART0 TX / I2C0 SDA / PWM0 A |
D5 |
3.3 V |
SPI0 CS / UART0 RX / I2C0 SCL / PWM0 B |
D6 |
3.3 V |
SPI0 SCK / UART0 CTS / I2C1 SDA / PWM1 A |
D7 |
3.3 V |
SPI0 TX / UART0 RTS / I2C1 SCL / PWM1 B |
D8 |
3.3 V |
SPI0 RX / UART1 TX / I2C0 SDA / PWM2 A |
D9 |
3.3 V |
SPI0 CS / UART1 RX / I2C0 SCL / PWM2 B |
D10 |
3.3 V |
SPI0 CS / UART1 RX / I2C0 SCL / PWM2 B |
D11 |
3.3 V |
SPI0 TX / UART1 RTS / I2C1 SCL / PWM3 B |
D12 |
3.3 V |
SPI0 RX / UART1 TX / I2C0 SDA / PWM2 A |
D13 |
3.3 V |
SPI0 SCK / UART1 CTS / I2C1 SDA / PWM3 A |
D14 / A0 |
3.3 V |
ADC / SPI1 SCK / UART1 CTS / I2C1 SDA / PWM5 A |
D15 / A1 |
3.3 V |
ADC / SPI1 TX / UART1 RTS / I2C1 SCL / PWM5 B |
D16 / A2 |
3.3 V |
ADC / SPI1 RX / UART0 TX / I2C0 SDA / PWM6 A |
D17 / A3 |
3.3 V |
ADC / SPI1 CS / UART0 RX / I2C0 SCL / PWM6 B |
D18 / A4 / SDA |
3.3 V |
ADC / I2C0 SDA / SPI1 RX / UART0 TX / PWM6 A |
D19 / A5 / SCL |
3.3 V |
ADC / I2C0 SCL / SPI1 CS / UART0 RX / PWM6 B |
D20 / A6 |
3.3 V |
ADC / GPIO |
D21 / A7 |
3.3 V |
ADC / GPIO |
RESET |
3.3 V |
prima o botão RESET da placa ou ligue a GND para reiniciar |
REC |
3.3 V |
BOOTSEL — ligue a alto na ligação à corrente para entrar no bootloader ROM do RP2040 |
LED_BUILTIN |
— |
LED de utilizador cor de laranja em |
LED_RED |
— |
Canal vermelho do LED RGB |
LED_GREEN |
— |
Canal verde do LED RGB |
LED_BLUE |
— |
Canal azul do LED RGB |
Aviso
Os pinos de E/S do Nano RP2040 Connect são apenas 3.3 V — não são tolerantes a 5 V. Aplicar 5 V neles danificará o RP2040.
Pinos de alimentação¶
VIN — entrada de 4 – 20 V. Alimenta a placa através do regulador de comutação integrado. Também recebe alimentação via díodo a partir do rail USB de 5 V, pelo que USB e
VINpodem estar presentes ao mesmo tempo sem se retroalimentarem.+5V — não ligado por defeito.
+3V3 — saída do regulador de 3.3 V.
AREF — pino de referência analógica. Não está ligado ao RP2040 nesta placa — o ADC é sempre referenciado a 3.3 V.
GND — massa comum.
O Nano RP2040 Connect pode ser alimentado por qualquer um dos caminhos:
Micro USB — fornece 5 V ao regulador integrado.
Pino VIN — aplique uma tensão regulada de 4 – 20 V.
Nota
Uma ponte de solda na parte inferior da placa liga +5V ao rail USB de 5 V. Feche-a para que o pino de cabeçalho +5V transporte efetivamente 5 V.
Nota
Uma ponte de solda normalmente fechada na saída do regulador de comutação 4–20 V integrado pode ser cortada para desativar o regulador, permitindo que a placa seja alimentada diretamente a partir de uma fonte externa de 3.3 V em +3V3.
Pinos de recuperação e depuração¶
RESET — tanto um pad exposto como um botão RESET momentâneo na parte superior da placa, ligados à linha NRST do RP2040. Ligue a GND ou prima o botão para reiniciar.
REC — pad exposto. Manter
RECem alto ao ligar à corrente (ou enquanto pressiona RESET) coloca o RP2040 no seu bootloader ROM; a placa reenumera como um dispositivo de armazenamento USB de massa com o nomeRPI-RP2e aceita uma imagem de firmware.uf2.
O Nano RP2040 Connect utiliza o duplo toque no botão de reset padrão do Arduino para entrar no bootloader do Arduino. Prima rapidamente o botão RESET duas vezes — a placa reenumera via USB como um dispositivo UF2 e o OpenMV IDE pode flashar uma nova imagem de firmware.
Os sinais SWD do RP2040 estão expostos em pads metalizados na parte traseira da placa, imediatamente abaixo do módulo NINA. Todos os sinais de depuração são referenciados a 3.3 V.
Periféricos integrados¶
LEDs¶
O Nano RP2040 Connect tem um LED RGB de utilizador — controlado através dos canais LED_RED, LED_GREEN e LED_BLUE serigrafados — mais um LED_BUILTIN cor de laranja separado em D13. Os quatro são controláveis por software através de machine.LED
from machine import LED
LED("LED_RED").on()
LED("LED_GREEN").on()
LED("LED_BLUE").on()
LED("LED_BUILTIN").on()
Um LED verde de alimentação separado na placa acende sempre que o rail de +3.3 V está ativo e não é controlável pelo utilizador.
Sensor de câmara¶
O firmware OpenMV no Nano RP2040 Connect suporta o sensor CMOS paralelo OmniVision OV7670. A placa não tem sensor de imagem integrado — ligue um módulo OV7670 aos pinos de cabeçalho serigrafados indicados abaixo e controle-o através do módulo csi — sensores de câmara
import csi
cam = csi.CSI()
cam.reset()
cam.pixformat(csi.RGB565)
cam.framesize(csi.QVGA)
cam.snapshot(time=2000) # let auto‑exposure settle
while True:
img = cam.snapshot()
Nota
O OV7670 utiliza 14 pinos. O firmware liga-os da seguinte forma:
Sinal do sensor |
Pino Nano RP2040 |
|---|---|
D0 |
|
D1 |
|
D2 |
|
D3 |
|
D4 |
|
D5 |
|
D6 |
|
D7 |
|
HSYNC |
|
VSYNC |
|
PXCLK |
|
MXCLK |
|
POWER |
|
RESET |
|
SCL |
|
SDA |
|
O barramento de controlo I²C do OV7670 é partilhado com o IMU integrado e o ATECC608A no I²C 0. O sensor encontra-se no endereço de 7 bits 0x21 — os dispositivos do utilizador no barramento 0 também devem evitar este endereço quando a câmara está ligada.
IMU¶
O LSM6DSOX integrado de 6 eixos (acelerómetro + giroscópio) encontra-se em I2C0. O machine.I2C(0) do port rp2 usa por defeito um conjunto de pinos diferente, por isso passe explicitamente os pads SDA/SCL serigrafados. Utilize o controlador frozen lsm6dsox.LSM6DSOX
import time
from machine import I2C, Pin
from lsm6dsox import LSM6DSOX
bus = I2C(0, scl=Pin("SCL"), sda=Pin("SDA"))
imu = LSM6DSOX(bus)
while True:
print(imu.accel()) # (x, y, z) in g
print(imu.gyro()) # (x, y, z) in deg/s
time.sleep_ms(100)
Microfone¶
O microfone PDM MP34DT06 integrado é capturado através de audio — Módulo de Áudio usando um dos blocos PIO do RP2040:
import audio
from ulab import numpy as np
def loudness(pcmbuf):
samples = np.array(np.frombuffer(pcmbuf, dtype=np.int16), dtype=np.float)
rms = np.sqrt(np.mean(samples ** 2))
if rms > 10000:
print("Loud!", int(rms))
audio.init(channels=1, frequency=16000, gain_db=24)
audio.start_streaming(loudness)
while True:
pass
Wi‑Fi¶
O módulo NINA‑W102 integrado é exposto via network — configuração de rede como interface de estação:
import network, time
wlan = network.WLAN(network.STA_IF)
wlan.active(True)
wlan.connect("ssid", "password")
while not wlan.isconnected():
time.sleep(1)
print("Wi‑Fi IP:", wlan.ipconfig("addr4")[0])
Bluetooth¶
O mesmo módulo NINA também expõe Bluetooth 4.2 LE. Utilize aioble — BLE Assíncrono para BLE compatível com asyncio — por exemplo, anuncie como periférico e aguarde a ligação de um central:
import asyncio
import aioble
async def run():
while True:
conn = await aioble.advertise(250_000, name="Nano-RP2040")
print("Connected:", conn.device)
await conn.disconnected()
asyncio.run(run())
Referência de barramentos¶
GPIO¶
Utilize machine.Pin para ler ou controlar qualquer um dos pinos serigrafados. As saídas são CMOS de 3.3 V, com 50 mA de sink total em todos os GPIOs.
from machine import Pin
out = Pin("D2", Pin.OUT)
out.on()
out.off()
out.value(1)
inp = Pin("D3", Pin.IN, Pin.PULL_UP)
print(inp.value())
Qualquer pino de entrada pode também disparar uma interrupção em transições de aresta:
def handler(pin):
print("triggered:", pin)
Pin("D3", Pin.IN, Pin.PULL_UP).irq(
handler, Pin.IRQ_FALLING | Pin.IRQ_RISING,
)
UART¶
Barramento |
TX |
RX |
|---|---|---|
UART0 |
TX |
RX |
Utilize os nomes serigrafados TX/RX com machine.UART
from machine import UART
uart = UART(0, baudrate=115200)
uart.write("hello")
uart.read(5)
Nota
machine.UART(1) existe mas está reservado para o módulo NINA‑W102 integrado (o link BLE); não o utilize diretamente.
I²C¶
Barramento |
SDA |
SCL |
|---|---|---|
I2C0 |
|
|
I2C1 |
|
|
Ambos os barramentos necessitam que os seus pinos sejam passados explicitamente a machine.I2C
from machine import I2C, Pin
bus0 = I2C(0, scl=Pin("SCL"), sda=Pin("SDA"), freq=400_000)
bus0.scan()
bus1 = I2C(1, scl=Pin("A1"), sda=Pin("A0"), freq=400_000)
bus1.scan()
Nota
Dois chips integrados partilham o barramento 0 — os dispositivos do utilizador neste barramento devem evitar os seus endereços:
0x6A— IMU LSM6DSOX0x60— ATECC608A‑MAHDA‑T
Usar A0/A1 como I²C consome-os para o barramento, pelo que não podem ser simultaneamente entradas ADC.
Nota
Os pads SDA / SCL (barramento 0) têm resistências de pull-up integradas para 3.3 V, pelo que não são necessárias resistências de pull-up externas para dispositivos nesse barramento. A0 / A1 (barramento 1) não as têm — adicione pull-ups externas quando utilizar o barramento 1.
O mesmo hardware também pode ser utilizado em modo alvo (escravo) através de machine.I2CTarget para expor uma região de memória a outro controlador I²C:
from machine import I2CTarget
buf = bytearray(32)
target = I2CTarget(0, addr=0x42, mem=buf)
SPI¶
Barramento |
MOSI |
MISO |
SCK |
CS |
|---|---|---|---|---|
SPI0 |
D11 |
D12 |
D13 |
D10 |
O port rp2 não pré-configura os pinos do SPI0 nesta placa, por isso passe os pads serigrafados explicitamente ao criar o barramento:
from machine import SPI, Pin
spi = SPI(0, baudrate=10_000_000,
sck=Pin("D13"), mosi=Pin("D11"), miso=Pin("D12"))
cs = Pin("D10", Pin.OUT, value=1) # CS is not driven by the SPI peripheral
cs.value(0)
spi.write(b"hello")
cs.value(1)
Nota
D13 funciona também como o LED_BUILTIN cor de laranja — ao conduzir SPI neste barramento, o LED piscará em sincronia com o relógio do barramento.
Nota
machine.SPI(1) existe mas está reservado para o módulo NINA‑W102 integrado (o link SPI Wi-Fi/BLE); não o utilize diretamente.
ADC¶
O RP2040 tem quatro canais ADC de 12 bits expostos em A0–A3, todos referenciados a 3.3 V — read_u16 devolve 0–65535 para 0–3.3 V no pino. O pino AREF da placa não está ligado, pelo que a referência é sempre 3.3 V:
from machine import ADC
import time
adc = ADC("A0")
while True:
voltage = adc.read_u16() * 3.3 / 65535
print(voltage)
time.sleep_ms(100)
PWM¶
Pino |
Fatia / canal |
|---|---|
TX |
PWM0 A |
RX |
PWM0 B |
D2 |
PWM4 B |
D3 |
PWM7 B |
D4 |
PWM0 A |
D5 |
PWM0 B |
D6 |
PWM1 A |
D7 |
PWM1 B |
D8 |
PWM2 A |
D9 |
PWM2 B |
D10 |
PWM2 B |
D11 |
PWM3 B |
D12 |
PWM2 A |
D13 |
PWM3 A |
D14 / A0 |
PWM5 A |
D15 / A1 |
PWM5 B |
D16 / A2 |
PWM6 A |
D17 / A3 |
PWM6 B |
D18 / A4 / SDA |
PWM6 A |
D19 / A5 / SCL |
PWM6 B |
Controle qualquer um deles via machine.PWM
from machine import Pin, PWM
pwm = PWM(Pin("D3"), freq=1_000, duty_u16=32768)
Nota
Vários pinos partilham canais de fatia PWM:
PWM0 A está em
TXe emD4.PWM0 B está em
RXe emD5.PWM2 A está em
D8e emD12.PWM2 B está em
D9e emD10.PWM6 A está em
D16/A2e emD18/A4/SDA.PWM6 B está em
D17/A3e emD19/A5/SCL.
Escolha um consumidor por canal de fatia. Os canais A e B dentro da mesma fatia partilham o período (frequência), mas cada um tem o seu próprio ciclo de trabalho.
Barramentos por software (bit‑banging)¶
machine.SoftI2C e machine.SoftSPI funcionam em qualquer GPIO se precisar de um barramento adicional.
Sensor térmico (externo)¶
O firmware inclui o controlador fir — driver de sensor térmico (fir == infravermelho longínquo) para um imagiador térmico AMG8833 8×8 ligado externamente. Ligue o módulo ao barramento I²C indicado abaixo e, em seguida, leia fotogramas com fir.init() + fir.snapshot()
import time
import image
import fir
fir.init() # auto‑detects the sensor
clock = time.clock()
while True:
clock.tick()
try:
img = fir.snapshot(x_scale=5, y_scale=5,
color_palette=image.PALETTE_IRONBOW,
hint=image.BICUBIC,
copy_to_fb=True)
except OSError:
continue
print(clock.fps())
O controlador fir comunica com o sensor apenas via I²C 0 — ligue o módulo aos pads SCL / SDA serigrafados. O endereço de 7 bits do sensor (0x69) não deve ser utilizado por nenhum outro dispositivo nesse barramento.
Temporização¶
time¶
O módulo time abrange atrasos bloqueantes, ticks monotónicos e medição do tempo decorrido:
import time
time.sleep(1) # seconds
time.sleep_ms(500)
time.sleep_us(10)
start = time.ticks_ms()
# ...do work...
elapsed = time.ticks_diff(time.ticks_ms(), start)
Temporizadores virtuais¶
machine.Timer agenda callbacks periódicos ou únicos sem consumir um slot de temporizador de hardware. Passe -1 como id para utilizar um temporizador virtual (por software):
from machine import Timer
one_shot = Timer(-1)
one_shot.init(period=5_000, mode=Timer.ONE_SHOT,
callback=lambda t: print("once"))
periodic = Timer(-1)
periodic.init(period=2_000, mode=Timer.PERIODIC,
callback=lambda t: print("tick"))
Os valores de período estão em milissegundos. Chame deinit() para parar e libertar o slot.
Relógio de tempo real¶
machine.RTC mantém a hora do relógio entre reinicializações. O RTC do RP2040 está ligado ao oscilador interno e não sobrevive a uma perda total de energia — defina a hora em cada arranque a frio se isso for relevante para a sua aplicação:
from machine import RTC
rtc = RTC()
rtc.datetime((2026, 4, 30, 4, 12, 0, 0, 0)) # Y, M, D, weekday, h, m, s, subsec
print(rtc.datetime())
Watchdog¶
machine.WDT reinicia a placa se a aplicação ficar bloqueada. Uma vez iniciado, não pode ser parado nem reconfigurado — alimente-o periodicamente dentro do seu ciclo principal:
from machine import WDT
wdt = WDT(timeout=5_000) # 5 second window
while True:
# ...do work...
wdt.feed()
Informações de arranque e runtime¶
Atualização de firmware (UF2)¶
O Nano RP2040 Connect utiliza o duplo toque no botão de reset padrão do Arduino para entrar no bootloader do Arduino. Prima rapidamente o botão de reset duas vezes — a placa reenumera via USB como um dispositivo UF2 e o OpenMV IDE pode flashar uma nova imagem de firmware.
Um script em execução pode reentrar no bootloader a pedido chamando machine.bootloader()
import machine
machine.bootloader()
Sistema de ficheiros e ordem de arranque¶
O firmware do Nano RP2040 Connect monta um único sistema de ficheiros no arranque:
Flash interna — sempre montada em
/flashe utilizada como diretório de trabalho. Contémmain.pyeREADME.txtpor defeito; criada no primeiro arranque.
Após a montagem, o interpretador executa scripts a partir de /flash:
boot.pyé executado em cada reinicialização soft.main.pyé executado apenas no arranque a frio, imediatamente apósboot.py.
O main.py predefinido fornecido numa placa recém-flashada faz piscar o canal azul do LED RGB de utilizador como batimento cardíaco (dois pulsos curtos, pausa curta), para que possa verificar que o firmware arrancou corretamente sem qualquer host ligado.
Quando ligada via USB, /flash enumera como uma unidade de armazenamento USB de massa no host, permitindo editar boot.py, main.py e quaisquer outros ficheiros diretamente. Ejete a unidade antes de reiniciar a placa para que o host liberte as suas escritas em cache.
Nota
Como o sistema operativo trata a unidade como um dispositivo de blocos passivo, os ficheiros criados ou modificados por código em execução na câmara não aparecem até que o host remonte a unidade. Se tanto o sistema operativo como a câmara escreverem no mesmo sistema de ficheiros ao mesmo tempo, o sistema operativo prevalece e substitui as alterações feitas pela câmara. Utilize o cartão SD para quaisquer dados que o script escreva, e remonte antes de ler esses ficheiros a partir do host.
Nota
O canal vermelho do LED RGB de utilizador pode acender brevemente enquanto o host está a ler ou a escrever na unidade de armazenamento USB de massa — trata-se de um indicador de atividade controlado pelo firmware, não de uma falha.
Tamanhos de armazenamento¶
O Nano RP2040 Connect é fornecido com:
/flash— sistema de ficheiros FAT de 14 MB, leitura/escrita.
A compilação do Nano RP2040 não inclui ROMFS; distribua módulos Python e modelos ML diretamente em /flash.
Bibliotecas de software¶
Consulte o índice de biblioteca para a lista completa de módulos — incluindo quais são exclusivos da compilação do Nano RP2040 Connect.