OpenMV Cam H7¶
A OpenMV Cam H7 é uma placa de visão por computador baseada em Cortex‑M7, construída em torno do STMicroelectronics STM32H743 a 480 MHz, com 1 MB de SRAM interna, 2 MB de flash interna e um codec JPEG por hardware. A placa existe em duas revisões de sensor — a H7 com o OV7725 e a H7 R2 com o ON Semi MT9M114 — mas o firmware, o pinout e a API Python são idênticos.

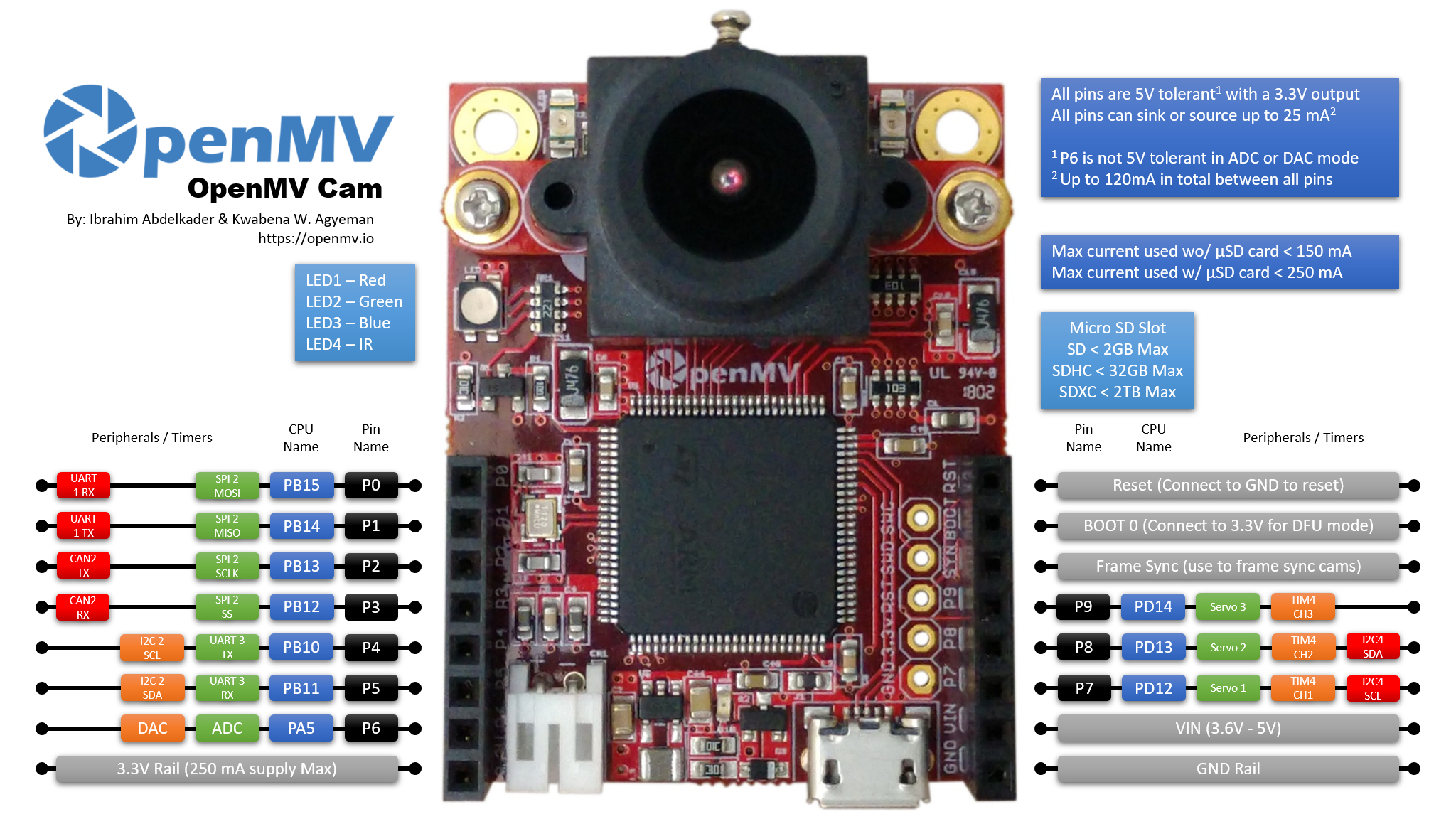
Para a ficha técnica completa, fotografias e dimensões, consulte a página do produto OpenMV Cam H7.
Destaques¶
STMicroelectronics STM32H743 Cortex‑M7 a 480 MHz (1027 DMIPS).
Encoder/decoder JPEG por hardware.
1 MB de SRAM interna — sem SDRAM externa.
2 MB de flash interna (sem flash QSPI externa).
Sensor OV7725 (ou MT9M114 na H7 R2).
USB full‑speed (12 Mb/s) — surge como VCP + armazenamento em massa USB no host.
Conector microSD — SD até 2 GB, SDHC até 32 GB, SDXC até 2 TB.
Conector de bateria LiPo (sem carregador integrado — utilize uma célula carregada ou alimente via VIN/USB).
10 pinos de E/S, tolerantes a 5 V com saída a 3,3 V, 25 mA por pino (120 mA no total no conector), com suporte a interrupções. O P6 não é tolerante a 5 V quando utilizado no modo ADC ou DAC.
LED RGB de utilizador e dois LEDs IR de alta potência a 850 nm para iluminação ativa em visão com pouca luz.
Nota
A H7 não tem chip de gestão de energia integrado: não há carregador de bateria, ADC de tensão de bateria, LEDs de estado de carga/alimentação nem botão de energia por hardware. Ligue uma LiPo pré-carregada ao JST de bateria ou alimente a placa via USB / VIN.
Pinout¶
Referência de pinos¶
Nome do pino |
Função |
|---|---|
P0 |
UART1 RX / SPI2 MOSI |
P1 |
UART1 TX / SPI2 MISO |
P2 |
SPI2 SCK / FDCAN2 TX |
P3 |
SPI2 NSS (CS) / FDCAN2 RX |
P4 |
I2C2 SCL / UART3 TX / TIM2 CH3 |
P5 |
I2C2 SDA / UART3 RX / TIM2 CH4 |
P6 |
ADC / DAC / TIM2 CH1 |
P7 |
I2C4 SCL / TIM4 CH1 |
P8 |
I2C4 SDA / TIM4 CH2 |
P9 |
TIM4 CH3 |
RESET |
ligar ao GND para reiniciar a placa |
SYN |
pad de sincronização de fotograma — ligado apenas ao sensor da câmara |
BOOT0 |
ligar a 3,3 V no arranque para DFU / bootloader de ROM |
LED_RED |
canal vermelho do LED RGB (ativo a baixo) |
LED_GREEN |
canal verde do LED RGB (ativo a baixo) |
LED_BLUE |
canal azul do LED RGB (ativo a baixo) |
LED_IR |
LEDs IR de alta potência (ambos os canais acionados em conjunto) |
Nota
O pad SYN no conector está ligado diretamente à linha de disparo / exposição do sensor da câmara — não é encaminhado para o MCU na H7. Acione-o ou leia-o externamente; não é possível controlá-lo a partir do MicroPython.
Pinos de alimentação¶
3.3V — rail regulado a 3,3 V. Até 250 mA disponíveis para shields (menos se o cartão microSD estiver em uso). Ao contrário das câmaras mais recentes, este pino é bidirecional — consulte o aviso abaixo.
VIN — entrada de 3,6 – 5 V. Alimenta a placa através do regulador integrado.
GND — massa comum.
Está também presente um conector LiPo de 3,7 V, mas a H7 não tem carregador de bateria — ligue uma célula pré-carregada ou alimente via VIN / USB.
Nota
Quando estão presentes USB e VIN/LiPo em simultâneo, a entrada VIN/LiPo prevalece — o comutador de alimentação integrado prioriza-a sobre o USB para alimentar a placa.
Aviso
O conector de bateria e o VIN estão ligados entre si na H7. Não ligue uma LiPo e aplique VIN ao mesmo tempo — as duas fontes entrarão em conflito e podem danificar a bateria, a placa ou ambos.
Aviso
Pode alimentar a H7 injetando 3,3 V diretamente no pino 3.3V se não quiser passar pelo regulador integrado. Nesse caso, não aplique também VIN ou alimentação USB ao mesmo tempo — retroalimentar o regulador enquanto outra fonte está ativa pode danificá-lo permanentemente e destruir a câmara.
Dica
Utilize o estimador de autonomia da bateria para modelar quanto tempo a H7 funcionará com uma bateria para um dado ciclo de trabalho ativo / em sono profundo.
Pinos de recuperação e depuração¶
RESET — ligar ao GND para reiniciar a placa. Ao libertar, o MCU arranca normalmente.
BOOT0 — ligar a 3,3 V ao ligar a placa para entrar no bootloader de ROM do STM32 (modo DFU). O OpenMV IDE usa este modo para reprogramar o bootloader integrado.
A placa expõe um conector de depuração SWD (RST / SWCLK / SWDIO) junto ao conector GPIO, compatível com adaptadores ST‑LINK e SEGGER J‑Link.
Periféricos integrados¶
LEDs¶
A H7 tem um único LED RGB de utilizador e um par de LEDs IR de alta potência a 850 nm:
LED RGB de utilizador — controlável por software, exposto como
LED_RED,LED_GREENeLED_BLUEfrom machine import LED LED("LED_RED").on() LED("LED_GREEN").on() LED("LED_BLUE").on()
LEDs IR — ambos os LEDs são acionados em conjunto através do pino
LED_IR. OLED_IRé ligado ativo a alto por hardware, enquanto o firmware trata todos os outros LEDs integrados como ativos a baixo, pelo que deve usarlow()/high()em vez deon()/off()(que inverteriam o sentido):from machine import LED ir = LED("LED_IR") ir.low() # turn IR illumination ON ir.high() # turn IR illumination OFF
Sensor da câmara¶
O OV7725 (ou MT9M114 na H7 R2) é controlado através do módulo csi — sensores de câmara
import csi
cam = csi.CSI()
cam.reset()
cam.pixformat(csi.RGB565)
cam.framesize(csi.QVGA)
cam.snapshot(time=2000) # let auto‑exposure settle
while True:
img = cam.snapshot()
O sensor encontra-se num módulo amovível — pode trocá-lo por qualquer outro módulo de câmara OpenMV (obturador global, térmico, maior resolução, etc.) sem alterar o resto da placa.
Cartão microSD¶
Quando um cartão é inserido, é montado automaticamente em /sdcard e pode ser utilizado através do sistema de ficheiros habitual:
import os
for entry in os.listdir("/sdcard"):
print(entry)
Referência de barramentos¶
GPIO¶
Utilize machine.Pin para ler ou acionar qualquer um dos pinos indicados na serigrafia. As saídas são CMOS a 3,3 V, tolerantes a 5 V no lado da entrada, e podem absorver/fornecer até 25 mA por pino (120 mA no total em todo o conector).
from machine import Pin
out = Pin("P0", Pin.OUT)
out.on()
out.off()
out.value(1)
inp = Pin("P1", Pin.IN, Pin.PULL_UP)
print(inp.value())
Qualquer pino de entrada pode também disparar uma interrupção em transições de nível:
def handler(pin):
print("triggered:", pin)
Pin("P1", Pin.IN, Pin.PULL_UP).irq(
handler, Pin.IRQ_FALLING | Pin.IRQ_RISING,
)
UART¶
Barramento |
TX |
RX |
|---|---|---|
UART1 |
P1 |
P0 |
UART3 |
P4 |
P5 |
from machine import UART
uart = UART(3, baudrate=115200)
uart.write("hello")
uart.read(5)
I²C¶
Barramento |
SCL |
SDA |
|---|---|---|
I2C2 |
P4 |
P5 |
I2C4 |
P7 |
P8 |
from machine import I2C
i2c = I2C(2, freq=400_000)
i2c.scan()
i2c.writeto(0x76, b"hi")
O mesmo hardware pode também ser utilizado no modo alvo (escravo) através de machine.I2CTarget para expor uma região de memória a outro controlador I²C:
from machine import I2CTarget
buf = bytearray(32)
target = I2CTarget(2, addr=0x42, mem=buf)
SPI¶
Barramento |
MOSI |
MISO |
SCK |
CS |
|---|---|---|---|---|
SPI2 |
P0 |
P1 |
P2 |
P3 |
from machine import SPI
from machine import Pin
spi = SPI(2, baudrate=10_000_000)
cs = Pin("P3", Pin.OUT, value=1) # CS is not driven by the SPI peripheral
cs.value(0)
spi.write(b"hello")
cs.value(1)
CAN (FDCAN)¶
Barramento |
TX |
RX |
|---|---|---|
FDCAN2 |
P2 |
P3 |
from machine import CAN
can = CAN(2, 500_000)
can.set_filters(None)
can.send(0x123, b"\xDE\xAD\xBE\xEF")
print(can.recv())
ADC e DAC¶
O P6 é o único pino analógico de utilizador. Pode ser usado como entrada ADC de 12 bits ou como saída DAC.
ADC — escala completa a 3,3 V no pino:
from machine import ADC import time adc = ADC("P6") while True: voltage = adc.read_u16() * 3.3 / 65535 print(voltage) time.sleep_ms(100)
DAC — através de
pyb.DAC. O valor de 8 bits cobre 0–3,3 V:from pyb import DAC dac = DAC("P6") voltage = 1.65 dac.write(int(voltage / 3.3 * 255))
No modo ADC ou DAC, o P6 é tolerante apenas a 3,3 V — não aplique 5 V.
PWM¶
Pino |
Temporizador / canal |
|---|---|
P4 |
TIM2 CH3 |
P5 |
TIM2 CH4 |
P6 |
TIM2 CH1 |
P7 |
TIM4 CH1 |
P8 |
TIM4 CH2 |
P9 |
TIM4 CH3 |
Nota
O TIM1 está reservado pelo firmware para gerar o clock de pixel do sensor da câmara, pelo que os canais do TIM1 que estão fisicamente em P0/P1/P2 não podem ser usados para PWM de utilizador sem quebrar o funcionamento da câmara.
O TIM4 é partilhado com pyb.Servo — instanciar um servo reconfigura todo o temporizador para operação a 50 Hz, por isso não misture machine.PWM em P7/P8/P9 com pyb.Servo no mesmo script.
Acione qualquer um deles via machine.PWM
from machine import Pin, PWM
pwm = PWM(Pin("P7"), freq=1_000, duty_u16=32768)
Barramentos por software (bit-banging)¶
machine.SoftI2C e machine.SoftSPI funcionam em qualquer GPIO se precisar de um barramento adicional.
Sensor térmico (externo)¶
O firmware inclui o driver fir — driver de sensor térmico (fir == infravermelho longínquo) para sensores térmicos ligados externamente:
MLX90621 — matriz IR de 16 × 4
MLX90640 — matriz IR de 32 × 24
MLX90641 — matriz IR de 16 × 12
AMG8833 — matriz IR de 8 × 8
Ligue o módulo ao barramento I²C da placa e leia fotogramas com fir.init() + fir.snapshot()
import time
import image
import fir
fir.init() # auto‑detects the sensor
clock = time.clock()
while True:
clock.tick()
try:
img = fir.snapshot(x_scale=5, y_scale=5,
color_palette=image.PALETTE_IRONBOW,
hint=image.BICUBIC,
copy_to_fb=True)
except OSError:
continue
print(clock.fps())
O driver fir comunica com o sensor apenas via I²C 2 — ligue o módulo a P4 (SCL) e P5 (SDA).
Temporização¶
time¶
O módulo time cobre atrasos bloqueantes, ticks monotónicos e medição de tempo decorrido:
import time
time.sleep(1) # seconds
time.sleep_ms(500)
time.sleep_us(10)
start = time.ticks_ms()
# ...do work...
elapsed = time.ticks_diff(time.ticks_ms(), start)
Temporizadores virtuais¶
machine.Timer agenda callbacks periódicos ou únicos sem consumir um slot de temporizador por hardware. Passe -1 como id para usar um temporizador virtual (por software):
from machine import Timer
one_shot = Timer(-1)
one_shot.init(period=5_000, mode=Timer.ONE_SHOT,
callback=lambda t: print("once"))
periodic = Timer(-1)
periodic.init(period=2_000, mode=Timer.PERIODIC,
callback=lambda t: print("tick"))
Os valores de período estão em milissegundos. Chame deinit() para parar e libertar o slot.
Relógio em tempo real¶
machine.RTC mantém a hora do relógio entre reinicializações:
from machine import RTC
rtc = RTC()
rtc.datetime((2026, 4, 30, 4, 12, 0, 0, 0)) # Y, M, D, weekday, h, m, s, subsec
print(rtc.datetime())
Watchdog¶
machine.WDT reinicia a placa se a aplicação ficar bloqueada. Uma vez iniciado, não pode ser parado nem reconfigurado — alimente-o periodicamente dentro do seu ciclo principal:
from machine import WDT
wdt = WDT(timeout=5_000) # 5 second window
while True:
# ...do work...
wdt.feed()
Informação de arranque e runtime¶
Janela do bootloader USB¶
Em cada arranque, a câmara executa um bootloader breve (alguns segundos) que permite ao OpenMV IDE atualizar o firmware sem que o utilizador necessite de entrar no modo DFU. Após expirar a janela, o bootloader passa o controlo a boot.py e depois a main.py.
Um script em execução pode voltar ao bootloader a pedido chamando machine.bootloader()
import machine
machine.bootloader()
Sistema de ficheiros e ordem de arranque¶
O firmware da H7 monta até três sistemas de ficheiros no arranque:
Flash interna — montada sempre em
/flash. Contémmain.pyeREADME.txtpor predefinição; criada no primeiro arranque.Cartão microSD — se um cartão estiver inserido, é montado em
/sdcard.ROMFS — sistema de ficheiros de leitura apenas, mapeado em memória em
/rom, usado para distribuir grandes recursos de dados (por ex., modelos de IA) que beneficiam de acesso sem cópia. Montado automaticamente pelo MicroPython no arranque, antes de qualquer código Python do utilizador ser executado.
Após a montagem, o diretório de trabalho é definido como /sdcard quando o cartão está presente, ou /flash caso contrário. O interpretador executa então os scripts a partir desse diretório:
boot.pyé executado em cada reset suave (arranque a frio,Ctrl‑Dno REPL, ou sempre que o script em execução termina).main.pyé executado apenas no arranque a frio, imediatamente apósboot.py. Os resets suaves subsequentes re-executamboot.pymas passam diretamente para o REPL — para re-executarmain.pyé necessário reinicializar completamente a placa.
Colocar um boot.py ou main.py no cartão SD substitui a cópia na flash sem a alterar — ambos os ficheiros são procurados no diretório de arranque (/sdcard quando o cartão está montado, caso contrário /flash).
O main.py predefinido que é distribuído numa placa recém-programada apenas faz piscar o canal azul do LED RGB de utilizador como batida cardíaca (dois pulsos curtos, pausa curta), para que seja possível confirmar que o firmware arrancou corretamente sem qualquer host ligado.
sys.path é alargado para incluir os três sistemas de ficheiros e os seus subdiretórios lib/, pelo que os módulos importáveis podem estar em /flash/lib, /sdcard/lib ou /rom/lib.
Para forçar o sistema a ignorar um cartão SD inserido (por exemplo, para executar o main.py da flash mesmo com um cartão presente), crie um ficheiro vazio com o nome SKIPSD na raiz de /flash.
Quando ligado via USB, o sistema de ficheiros de arranque (/sdcard se houver cartão, caso contrário /flash) também é enumerado como unidade de armazenamento em massa USB no host, permitindo editar diretamente boot.py, main.py e quaisquer outros ficheiros. Ejete a unidade antes de reiniciar a câmara para que o host descarregue as escritas em cache.
Nota
Como o sistema operativo trata a unidade como um dispositivo de blocos passivo, os ficheiros criados ou modificados por código a correr na OpenMV Cam não aparecerão até o host remontar a unidade. Se tanto o sistema operativo como a OpenMV Cam escreverem no mesmo sistema de ficheiros ao mesmo tempo, o sistema operativo prevalecerá e sobrescreverá as alterações feitas pela câmara. Utilize o cartão SD para quaisquer dados que o script escreva, e remonte antes de ler esses ficheiros a partir do host.
Nota
O canal vermelho do LED RGB de utilizador pode acender brevemente enquanto o host está a ler ou a escrever na unidade de armazenamento em massa USB — trata-se de um indicador de atividade controlado pelo firmware, não de uma falha.
Tamanhos de armazenamento¶
A H7 é fornecida com:
/flash— sistema de ficheiros FAT de 128 KB, leitura/escrita./rom— ROMFS de 128 KB de leitura apenas, mapeado em memória./sdcard— tamanho total do cartão microSD inserido (quando presente), leitura/escrita.
Indicador de hard fault¶
Se o LED RGB de utilizador estiver a percorrer rapidamente todas as cores — rápido o suficiente para parecer um LED branco a piscar em vez de tonalidades distintas — o firmware sofreu um hard fault irrecuperável. Reprogramar o firmware para recuperar; se a reprogramação não ajudar, a placa pode estar fisicamente danificada.
Bibliotecas de software¶
Consulte o índice de bibliotecas para a lista completa de módulos — incluindo quais são exclusivos da compilação H7.