OpenMV Cam M7¶
A OpenMV Cam M7 é uma placa de visão por computador baseada em Cortex‑M7, construída em torno do STMicroelectronics STM32F765 a 216 MHz, com 512 KB de SRAM interna e 2 MB de flash interna. O sensor OV7725 incluído captura fotogramas em escala de cinzentos de 640×480 ou RGB565 de 320×240 a até 150 FPS, e o conector de utilizador de 10 pinos expõe periféricos UART, I²C, SPI, CAN, ADC/DAC e PWM.

Para o datasheet completo, fotografias e dimensões, consulte a página do produto OpenMV Cam M7.
Destaques¶
STMicroelectronics STM32F765 Cortex‑M7 a 216 MHz.
512 KB de SRAM interna — sem SDRAM externa.
2 MB de flash interna (sem flash QSPI externa).
Sensor OV7725 — escala de cinzentos 640×480 ou RGB565 320×240 a até 150 FPS.
USB de alta velocidade (12 Mb/s) — aparece ao sistema anfitrião como VCP + armazenamento de massa USB.
Ranhura microSD — SD até 2 GB, SDHC até 32 GB, SDXC até 2 TB.
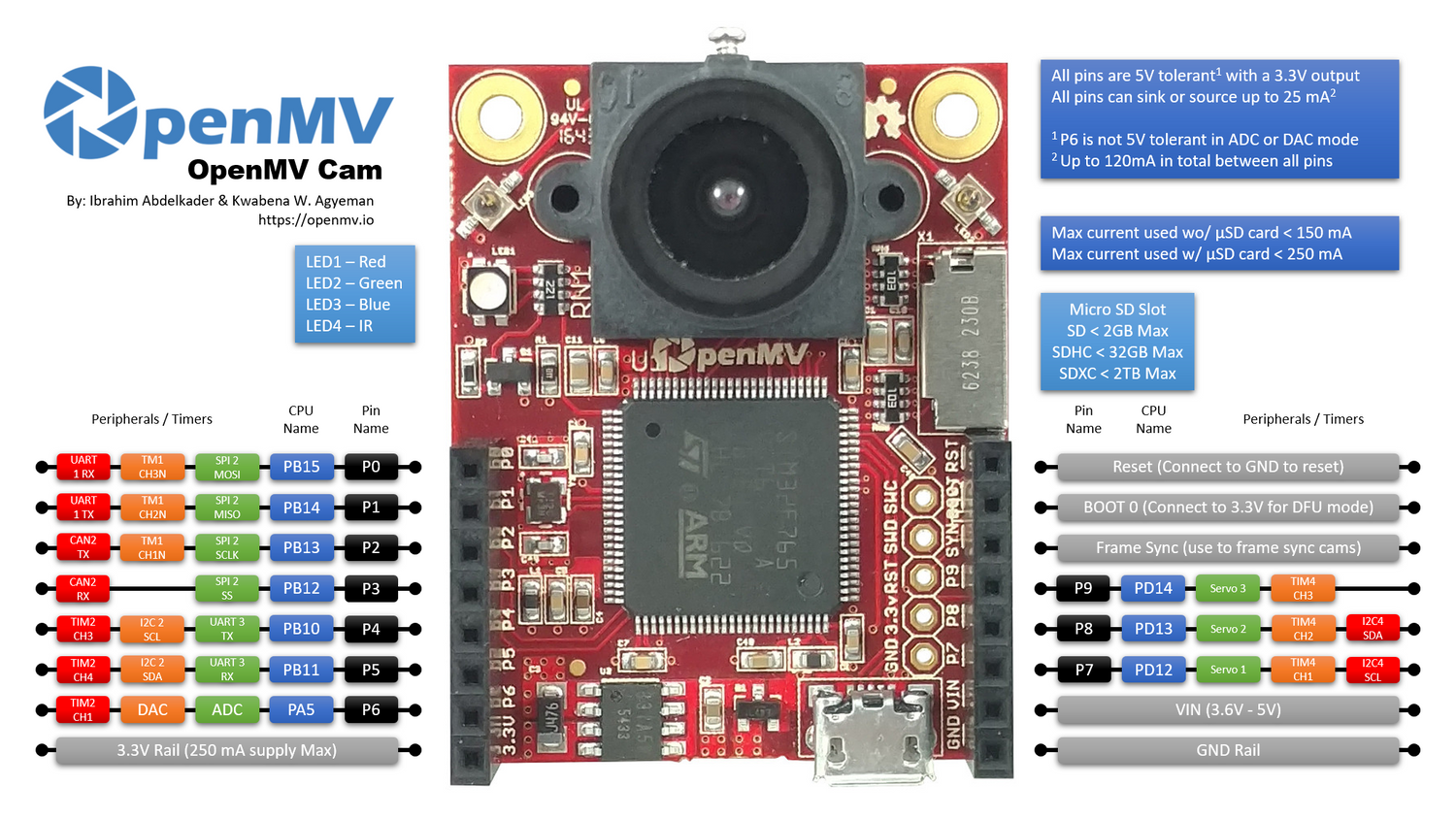
10 pinos de E/S, tolerantes a 5 V com saída de 3,3 V, 25 mA por pino (120 mA no total em todo o conector), com suporte a interrupções. O pino P6 não é tolerante a 5 V quando utilizado no modo ADC ou DAC.
LED RGB de utilizador e dois LEDs IR de alta potência a 850 nm para iluminação ativa em visão com pouca luz.
Nota
A M7 não possui chip de gestão de energia a bordo: não tem conector de bateria, nem carregador de bateria, nem ADC de tensão de bateria, nem LEDs de carga/estado de energia, nem botão de alimentação por hardware. Alimente a placa através de USB ou VIN.
Pinagem¶
Referência de pinos¶
Nome do pino |
Função |
|---|---|
P0 |
UART1 RX / SPI2 MOSI |
P1 |
UART1 TX / SPI2 MISO |
P2 |
SPI2 SCK / CAN2 TX |
P3 |
SPI2 NSS (CS) / CAN2 RX |
P4 |
I2C2 SCL / UART3 TX / TIM2 CH3 |
P5 |
I2C2 SDA / UART3 RX / TIM2 CH4 |
P6 |
ADC / DAC / TIM2 CH1 |
P7 |
I2C4 SCL / TIM4 CH1 |
P8 |
I2C4 SDA / TIM4 CH2 |
P9 |
TIM4 CH3 |
RESET |
ligar ao GND para reiniciar a placa |
SYN |
pad de sincronização de fotograma — ligado apenas ao sensor da câmara |
BOOT0 |
ligar a 3,3 V ao ligar para DFU / bootloader ROM |
LED_RED |
canal vermelho do LED RGB (ativo em nível baixo) |
LED_GREEN |
canal verde do LED RGB (ativo em nível baixo) |
LED_BLUE |
canal azul do LED RGB (ativo em nível baixo) |
LED_IR |
LEDs IR de alta potência (ambos os canais acionados em conjunto) |
Nota
O pad SYN no conector está ligado diretamente à linha de disparo/exposição do sensor da câmara — não está encaminhado para o MCU na M7. Acione-o ou leia-o externamente; não é possível controlá-lo a partir do MicroPython.
Pinos de alimentação¶
3.3V — rail de 3,3 V regulado. Até 250 mA disponíveis para shields (menos se o cartão microSD estiver em uso). Ao contrário das câmaras mais recentes, este pino é bidirecional — consulte o aviso abaixo.
VIN — entrada de 3,6–5 V. Alimenta a placa através do regulador a bordo.
GND — massa comum.
Nota
Quando USB e VIN estão presentes simultaneamente, aquele com maior tensão alimenta a placa — os díodos a bordo selecionam simplesmente o rail mais forte.
Aviso
Pode alimentar a M7 injetando 3,3 V diretamente no pino 3.3V se não quiser passar pelo regulador a bordo. Nesse caso, não aplique também alimentação por VIN ou USB ao mesmo tempo — alimentar o regulador na direção inversa enquanto outra fonte estiver ativa pode danificar e destruir permanentemente a câmara.
Dica
Utilize o estimador de duração de bateria para modelar quanto tempo a M7 funcionará com uma bateria para um dado ciclo de trabalho ativo/sono profundo.
Pinos de recuperação e depuração¶
RESET — ligar ao GND para reiniciar a placa. Ao libertar, o MCU arranca normalmente.
BOOT0 — ligar a 3,3 V ao alimentar a placa para entrar no bootloader ROM do STM32 (modo DFU). O OpenMV IDE utiliza este modo para reflashear o bootloader a bordo.
A placa expõe um conector de depuração SWD (RST / SWCLK / SWDIO) junto ao conector GPIO, compatível com adaptadores ST‑LINK e SEGGER J‑Link.
Periféricos a bordo¶
LEDs¶
A M7 tem um único LED RGB de utilizador mais um par de LEDs IR de alta potência a 850 nm:
LED RGB de utilizador — controlável por software, exposto como
LED_RED,LED_GREENeLED_BLUEfrom machine import LED LED("LED_RED").on() LED("LED_GREEN").on() LED("LED_BLUE").on()
LEDs IR — ambos os LEDs são acionados em conjunto através do pino
LED_IR. OLED_IRestá ligado como ativo em nível alto por hardware, enquanto o firmware trata todos os outros LEDs a bordo como ativos em nível baixo; por isso utilizelow()/high()em vez deon()/off()(que inverteriam o sentido):from machine import LED ir = LED("LED_IR") ir.low() # turn IR illumination ON ir.high() # turn IR illumination OFF
Sensor da câmara¶
O OV7725 é controlado através do módulo csi — sensores de câmara
import csi
cam = csi.CSI()
cam.reset()
cam.pixformat(csi.RGB565)
cam.framesize(csi.QVGA)
cam.snapshot(time=2000) # let auto‑exposure settle
while True:
img = cam.snapshot()
O sensor está soldado à placa na M7 — não se encontra num módulo substituível.
Cartão microSD¶
Quando um cartão é inserido, é montado automaticamente em /sdcard e pode ser utilizado através do sistema de ficheiros regular:
import os
for entry in os.listdir("/sdcard"):
print(entry)
Referência de barramentos¶
GPIO¶
Utilize machine.Pin para ler ou acionar qualquer um dos pinos indicados na silkscreen. As saídas são CMOS de 3,3 V, tolerantes a 5 V no lado de entrada, e podem absorver/fornecer até 25 mA por pino (120 mA no total em todo o conector).
from machine import Pin
out = Pin("P0", Pin.OUT)
out.on()
out.off()
out.value(1)
inp = Pin("P1", Pin.IN, Pin.PULL_UP)
print(inp.value())
Qualquer pino de entrada pode também disparar uma interrupção em transições de aresta:
def handler(pin):
print("triggered:", pin)
Pin("P1", Pin.IN, Pin.PULL_UP).irq(
handler, Pin.IRQ_FALLING | Pin.IRQ_RISING,
)
UART¶
Barramento |
TX |
RX |
|---|---|---|
UART1 |
P1 |
P0 |
UART3 |
P4 |
P5 |
from machine import UART
uart = UART(3, baudrate=115200)
uart.write("hello")
uart.read(5)
I²C¶
Barramento |
SCL |
SDA |
|---|---|---|
I2C2 |
P4 |
P5 |
I2C4 |
P7 |
P8 |
from machine import I2C
i2c = I2C(2, freq=400_000)
i2c.scan()
i2c.writeto(0x76, b"hi")
O mesmo hardware pode também ser utilizado em modo alvo (escravo) através de machine.I2CTarget para expor uma região de memória a outro controlador I²C:
from machine import I2CTarget
buf = bytearray(32)
target = I2CTarget(2, addr=0x42, mem=buf)
SPI¶
Barramento |
MOSI |
MISO |
SCK |
CS |
|---|---|---|---|---|
SPI2 |
P0 |
P1 |
P2 |
P3 |
from machine import SPI
from machine import Pin
spi = SPI(2, baudrate=10_000_000)
cs = Pin("P3", Pin.OUT, value=1) # CS is not driven by the SPI peripheral
cs.value(0)
spi.write(b"hello")
cs.value(1)
CAN¶
Barramento |
TX |
RX |
|---|---|---|
CAN2 |
P2 |
P3 |
from machine import CAN
can = CAN(2, 500_000)
can.set_filters(None)
can.send(0x123, b"\xDE\xAD\xBE\xEF")
print(can.recv())
ADC e DAC¶
P6 é o único pino analógico de utilizador. Pode ser utilizado como entrada ADC de 12 bits ou como saída DAC.
ADC — escala completa a 3,3 V no pino:
from machine import ADC import time adc = ADC("P6") while True: voltage = adc.read_u16() * 3.3 / 65535 print(voltage) time.sleep_ms(100)
DAC — através de
pyb.DAC. O valor de 8 bits cobre 0–3,3 V:from pyb import DAC dac = DAC("P6") voltage = 1.65 dac.write(int(voltage / 3.3 * 255))
Em modo ADC ou DAC, o P6 é tolerante apenas a 3,3 V — não o alimente com 5 V.
PWM¶
Pino |
Temporizador / canal |
|---|---|
P4 |
TIM2 CH3 |
P5 |
TIM2 CH4 |
P6 |
TIM2 CH1 |
P7 |
TIM4 CH1 |
P8 |
TIM4 CH2 |
P9 |
TIM4 CH3 |
Nota
O TIM1 está reservado pelo firmware para gerar o clock de pixel do sensor da câmara, pelo que os canais do TIM1 que estão fisicamente em P0/P1/P2 não podem ser utilizados para PWM de utilizador sem danificar a câmara.
O TIM4 é partilhado com pyb.Servo — ao instanciar um servo reconfigura-se o temporizador inteiro para operação a 50 Hz, pelo que não se deve misturar machine.PWM em P7/P8/P9 com pyb.Servo no mesmo script.
Acione qualquer um deles através de machine.PWM
from machine import Pin, PWM
pwm = PWM(Pin("P7"), freq=1_000, duty_u16=32768)
Barramentos por software (bit-banging)¶
machine.SoftI2C e machine.SoftSPI funcionam em qualquer GPIO se precisar de um barramento adicional.
Sensor térmico (externo)¶
O firmware inclui o driver fir — driver de sensor térmico (fir == infravermelho longínquo) para imagiadores térmicos ligados externamente:
MLX90621 — array IR 16 × 4
MLX90640 — array IR 32 × 24
MLX90641 — array IR 16 × 12
AMG8833 — array IR 8 × 8
Ligue o módulo ao barramento I²C da placa e leia fotogramas com fir.init() + fir.snapshot()
import time
import image
import fir
fir.init() # auto‑detects the sensor
clock = time.clock()
while True:
clock.tick()
try:
img = fir.snapshot(x_scale=5, y_scale=5,
color_palette=image.PALETTE_IRONBOW,
hint=image.BICUBIC,
copy_to_fb=True)
except OSError:
continue
print(clock.fps())
O driver fir comunica com o sensor apenas através do I²C 2 — ligue o módulo a P4 (SCL) e P5 (SDA).
Temporização¶
time¶
O módulo time cobre atrasos bloqueantes, ticks monotónicos e medição de tempo decorrido:
import time
time.sleep(1) # seconds
time.sleep_ms(500)
time.sleep_us(10)
start = time.ticks_ms()
# ...do work...
elapsed = time.ticks_diff(time.ticks_ms(), start)
Temporizadores virtuais¶
machine.Timer agenda callbacks periódicos ou únicos sem consumir uma slot de temporizador por hardware. Passe -1 como id para usar um temporizador virtual (por software):
from machine import Timer
one_shot = Timer(-1)
one_shot.init(period=5_000, mode=Timer.ONE_SHOT,
callback=lambda t: print("once"))
periodic = Timer(-1)
periodic.init(period=2_000, mode=Timer.PERIODIC,
callback=lambda t: print("tick"))
Os valores de período são em milissegundos. Chame deinit() para parar e libertar a slot.
Relógio de tempo real¶
machine.RTC mantém a hora do relógio de parede entre reinícios:
from machine import RTC
rtc = RTC()
rtc.datetime((2026, 4, 30, 4, 12, 0, 0, 0)) # Y, M, D, weekday, h, m, s, subsec
print(rtc.datetime())
Watchdog¶
machine.WDT reinicia a placa se a aplicação ficar bloqueada. Uma vez iniciado, não pode ser parado nem reconfigurado — alimente-o periodicamente dentro do seu ciclo principal:
from machine import WDT
wdt = WDT(timeout=5_000) # 5 second window
while True:
# ...do work...
wdt.feed()
Informações de arranque e execução¶
Janela do bootloader USB¶
Em cada arranque, a câmara executa um bootloader breve (alguns segundos) que permite ao OpenMV IDE atualizar o firmware sem que o utilizador tenha de entrar em modo DFU. Após a janela expirar, o bootloader cede o controlo ao boot.py e depois ao main.py.
Um script em execução pode voltar ao bootloader sob pedido chamando machine.bootloader()
import machine
machine.bootloader()
Sistema de ficheiros e ordem de arranque¶
O firmware da M7 monta até três sistemas de ficheiros no arranque:
Flash interna — sempre montada em
/flash. Contémmain.pyeREADME.txtpor omissão; criada no primeiro arranque.Cartão microSD — se um cartão estiver inserido, é montado em
/sdcard.ROMFS — sistema de ficheiros ROMFS de só leitura mapeado em memória em
/rom, utilizado para distribuir grandes recursos de dados (p. ex. modelos de IA) que beneficiam de acesso zero-copy. Montado automaticamente pelo MicroPython no arranque, antes de qualquer código Python do utilizador ser executado.
Após a montagem, o diretório de trabalho é definido para /sdcard quando o cartão está presente, caso contrário para /flash. O interpretador executa então scripts a partir desse diretório:
O
boot.pyé executado em cada soft reset (arranque a frio,Ctrl‑Da partir do REPL, ou sempre que o script em execução terminar).O
main.pyé executado apenas no arranque a frio, imediatamente após oboot.py. Os soft resets subsequentes re-executam oboot.pymas vão diretamente para o REPL — para re-executar omain.pytem de reiniciar completamente a placa.
Colocar um boot.py ou main.py no cartão SD substitui a cópia em flash sem a modificar — ambos os ficheiros são procurados no diretório de arranque (/sdcard quando o cartão está montado, caso contrário /flash).
O main.py predefinido fornecido numa placa recém-flasheada apenas pisca o canal azul do LED RGB de utilizador como heartbeat (dois pulsos curtos, pausa curta), para que possa confirmar que o firmware arrancou corretamente sem nenhum anfitrião ligado.
O sys.path é alargado para incluir os três sistemas de ficheiros e os respetivos subdiretórios lib/, pelo que os módulos importáveis podem residir em /flash/lib, /sdcard/lib ou /rom/lib.
Para forçar o sistema a ignorar um cartão SD inserido (por exemplo, para executar o main.py da flash mesmo com um cartão presente), crie um ficheiro vazio com o nome SKIPSD na raiz de /flash.
Quando ligado por USB, o sistema de ficheiros de arranque (/sdcard se um cartão estiver presente, caso contrário /flash) também é enumerado como uma unidade de armazenamento de massa USB no anfitrião, permitindo editar boot.py, main.py e quaisquer outros ficheiros diretamente. Ejete a unidade antes de reiniciar a câmara para que o anfitrião escreva as suas alterações em cache.
Nota
Como o sistema operativo trata a unidade como um dispositivo de blocos passivo, os ficheiros criados ou modificados por código em execução na OpenMV Cam não aparecerão até que o anfitrião remonte a unidade. Se tanto o sistema operativo como a OpenMV Cam escreverem no mesmo sistema de ficheiros ao mesmo tempo, o sistema operativo prevalecerá e sobrescreverá as alterações feitas pela câmara. Utilize o cartão SD para quaisquer dados que o script grave, e remonte antes de ler esses ficheiros a partir do anfitrião.
Nota
O canal vermelho do LED RGB de utilizador pode acender brevemente enquanto o anfitrião lê ou escreve na unidade de armazenamento de massa USB — este é um indicador de atividade controlado pelo firmware, não uma falha.
Tamanhos de armazenamento¶
A M7 é fornecida com:
/flash— sistema de ficheiros FAT de 96 KB, leitura/escrita./rom— ROMFS de só leitura mapeado em memória de 256 KB./sdcard— tamanho total do cartão microSD inserido (quando presente), leitura/escrita.
Indicador de hard fault¶
Se o LED RGB de utilizador estiver a ciclar rapidamente por todas as cores — suficientemente rápido para parecer um LED branco a cintilar em vez de matizes distintos — o firmware atingiu um hard fault irrecuperável. Reflashee o firmware para recuperar; se o reflash não ajudar, a placa pode estar fisicamente danificada.
Bibliotecas de software¶
Consulte o índice da biblioteca para obter a lista completa de módulos — incluindo quais são exclusivos da compilação M7.