Arduino Giga R1 WiFi¶
ה‑Arduino Giga R1 WiFi הוא לוח בגודל 101 × 53 מ“מ בפורמט Mega, הבנוי סביב ה‑STMicroelectronics STM32H747XI — שבב SoC דו‑ליבתי המשלב Cortex‑M7 ב‑480 MHz עם Cortex‑M4 ב‑240 MHz. קושחת OpenMV רצה כולה על ליבת ה‑M7. ה‑Giga מוסיף מחבר גמיש למצלמת Arducam בן 22 פינים, מחבר MIPI‑DSI עבור ה‑Arduino Giga Display Shield, ושקע אודיו סטריאו 3.5 מ“מ למבנה הסטנדרטי של מחברי ה‑Arduino Mega.
ל‑datasheet המלא, תמונות ומידות ראו את דף המוצר של Arduino Giga R1 WiFi.
עיקרים¶
STMicroelectronics STM32H747XI דו‑ליבתי Cortex‑M7 (480 MHz) + Cortex‑M4 (240 MHz). קושחת OpenMV רצה על ליבת ה‑M7 בלבד; ליבת ה‑M4 נחשפת דרך openamp לתקשורת בין‑מעבדים.
8 MB של SDRAM חיצוני בתוספת 2 MB של flash פנימי ו‑16 MB של QSPI flash חיצוני.
מקודד/מפענח JPEG חומרתי.
מחבר גמיש למצלמה תואם Arducam בן 22 פינים (
J6) — תמיכת מנהל התקן עבור מודולי החיישנים OV5640 (5MP), OV7670, GC2145, HM01B0 ו‑HM0360.מחבר תצוגה MIPI‑DSI (
J5) עבור ה‑Arduino Giga Display Shield (פאנל מגע קיבולי 480×800) בתוספת מנוע תצוגה LTDC RGB עבור לוחות נשיאה מתקדמים.שקע אודיו 3.5 מ“מ עם יציאת line‑out סטריאו וכניסת מיקרופון.
Wi‑Fi b/g/n (2.4 GHz) + Bluetooth LE 5.1 באמצעות מודול ה‑Murata 1DX (CYW4343W) — מתחבר לאנטנה המצורפת דרך מחבר U.FL על הלוח.
USB‑C (full‑speed) להזנת מתח / טורי / תכנות.
קלט/פלט משתמש על מחברי סגנון ה‑Mega —
D0–D75(דיגיטלי),A0–A11(אנלוגי),DAC0/DAC1(יציאות DAC),CAN_RX/CAN_TX(FDCAN2), וזוג ה‑I²CSDA1/SCL1בשורה הפנימית. מחבר SPI1 נפרד בן 6 פינים בחזית הלוח מוציא אתCIPO/COPI/SCK(D89/D90/D91).JTAG / SWD מוצא במחבר ה‑debug בצד העליון עבור debug מתקדם.
מיפוי פינים¶
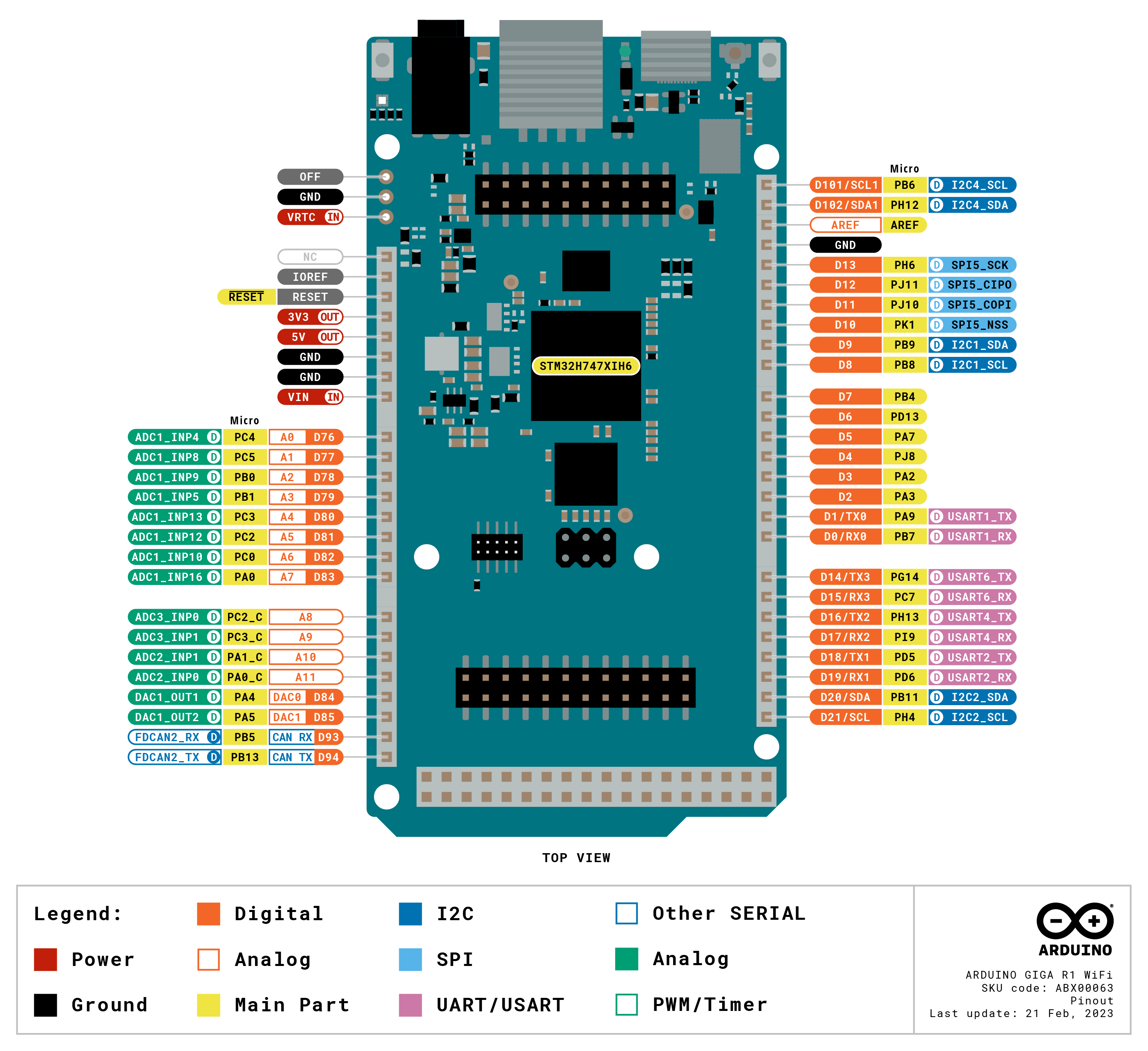
מדריך פינים¶
מחברי סגנון ה‑Arduino Mega חושפים 76 פינים דיגיטליים (D0–D75), 12 פינים אנלוגיים (A0–A11), שתי יציאות DAC (DAC0/DAC1), זוג I²C משני (SDA1/SCL1), וזוג FDCAN2 (CAN_RX/CAN_TX). מחבר SPI1 נפרד בן 6 פינים בחזית הלוח מוציא את CIPO/COPI/SCK (D89/D90/D91).
שם פין |
ייחוס |
פונקציה |
|---|---|---|
D0 |
3.3 V |
USART1 RX (Serial1) / TIM4 CH2 |
D1 |
3.3 V |
USART1 TX (Serial1) / TIM1 CH2 |
D2 |
3.3 V |
TIM2 CH4 / TIM5 CH4 / USART2 RX |
D3 |
3.3 V |
TIM2 CH3 / TIM5 CH3 / USART2 TX |
D4 |
3.3 V |
TIM8 CH1 / UART8 TX |
D5 |
3.3 V |
TIM3 CH2 / SPI1 MOSI / SPI6 MOSI |
D6 |
3.3 V |
TIM4 CH2 |
D7 |
3.3 V |
TIM3 CH1 / SPI1 MISO / SPI3 MISO / SPI6 MISO |
D8 |
3.3 V |
TIM4 CH3 / I2C1 SCL / I2C4 SCL / UART4 RX |
D9 |
3.3 V |
TIM4 CH4 / I2C1 SDA / I2C4 SDA / UART4 TX |
D10 |
3.3 V |
TIM1 CH1 / TIM8 CH3N |
D11 |
3.3 V |
TIM8 CH2 / SPI5 MOSI |
D12 |
3.3 V |
TIM8 CH2N / SPI5 MISO |
D13 |
3.3 V |
TIM12 CH1 / SPI5 SCK |
D14 |
3.3 V |
USART6 TX (Serial2) / SPI6 MOSI |
D15 |
3.3 V |
USART6 RX (Serial2) / TIM3 CH2 / TIM8 CH2 |
D16 |
3.3 V |
UART4 TX (Serial3) / TIM8 CH1N |
D17 |
3.3 V |
UART4 RX (Serial3) |
D18 |
3.3 V |
USART2 TX (Serial4) |
D19 |
3.3 V |
USART2 RX (Serial4) / SPI3 MOSI |
D20 |
3.3 V |
I2C2 SDA / TIM2 CH4 / USART3 RX |
D21 |
3.3 V |
I2C2 SCL |
D22 |
3.3 V |
GPIO |
D23 |
3.3 V |
GPIO / SPI6 SCK |
D24 |
3.3 V |
GPIO / SPI6 MISO |
D25 |
3.3 V |
GPIO |
D26 |
3.3 V |
GPIO |
D27 |
3.3 V |
GPIO |
D28 |
3.3 V |
GPIO |
D29 |
3.3 V |
GPIO |
D30 |
3.3 V |
GPIO |
D31 |
3.3 V |
GPIO |
D32 |
3.3 V |
GPIO |
D33 |
3.3 V |
GPIO |
D34 |
3.3 V |
GPIO |
D35 |
3.3 V |
GPIO |
D36 |
3.3 V |
GPIO |
D37 |
3.3 V |
TIM8 CH2 |
D38 |
3.3 V |
TIM8 CH2N |
D39 |
3.3 V |
GPIO |
D40 |
3.3 V |
TIM15 CH2 / SPI4 MOSI |
D41 |
3.3 V |
GPIO |
D42 |
3.3 V |
GPIO |
D43 |
3.3 V |
GPIO |
D44 |
3.3 V |
GPIO |
D45 |
3.3 V |
GPIO |
D46 |
3.3 V |
TIM8 CH3N |
D47 |
3.3 V |
SPI3 MOSI |
D48 |
3.3 V |
TIM8 CH3 / SPI5 SCK |
D49 |
3.3 V |
GPIO |
D50 |
3.3 V |
GPIO |
D51 |
3.3 V |
TIM15 CH1 / SPI4 MISO |
D52 |
3.3 V |
GPIO |
D53 |
3.3 V |
GPIO |
D54 |
3.3 V |
TIM8 CH1 (camera DCMI VSYNC) |
D55 |
3.3 V |
I2C3 SDA (camera DCMI HSYNC) |
D56 |
3.3 V |
TIM3 CH1 / TIM13 CH1 (camera DCMI PXCLK) |
D57 |
3.3 V |
TIM8 CH1N / UART8 RX (camera master clock — TIM1 CH3) |
D58 |
3.3 V |
TIM8 CH3 (camera DCMI D7) |
D59 |
3.3 V |
TIM8 CH2 (camera DCMI D6) |
D60 |
3.3 V |
GPIO (camera DCMI D5) |
D61 |
3.3 V |
TIM8 CH2N / UART4 RX (camera DCMI D4) |
D62 |
3.3 V |
SPI1 SCK (camera DCMI D3) |
D63 |
3.3 V |
TIM5 CH2 / I2C4 SCL (display I²C) |
D64 |
3.3 V |
TIM5 CH1 (camera DCMI D1) |
D65 |
3.3 V |
TIM12 CH2 (camera DCMI D0) |
D66 |
3.3 V |
GPIO (camera reset — claimed when camera is active) |
D67 |
3.3 V |
GPIO (camera power‑down — claimed when camera is active) |
D68 |
3.3 V |
TIM3 CH1 / TIM8 CH1 / USART6 TX (Display Shield DSI RESET) |
D69 |
3.3 V |
TIM5 CH4 (Display Shield DSI TE) |
D70 |
3.3 V |
SPI2 SCK |
D71 |
3.3 V |
TIM8 CH4 / SPI2 MISO |
D72 |
3.3 V |
SPI2 MOSI |
D73 |
3.3 V |
ADC123 IN11 (Display Shield DFSDM mic data) |
D74 |
3.3 V |
GPIO (display backlight — claimed by the Giga Display Shield) |
D75 |
3.3 V |
SPI2 SCK (Display Shield DFSDM mic clock) |
A0 / D76 |
3.3 V |
ADC12 IN4 |
A1 / D77 |
3.3 V |
ADC12 IN8 |
A2 / D78 |
3.3 V |
ADC12 IN9 / TIM3 CH3 / TIM8 CH2N |
A3 / D79 |
3.3 V |
ADC12 IN5 / TIM3 CH4 / TIM8 CH3N |
A4 / D80 |
3.3 V |
ADC12 IN13 / SPI2 MOSI |
A5 / D81 |
3.3 V |
ADC123 IN12 / SPI2 MISO |
A6 / D82 |
3.3 V |
ADC123 IN10 |
A7 / D83 |
3.3 V |
ADC1 IN16 / TIM2 CH1 / TIM5 CH1 (audio jack mic input) |
A8 |
3.3 V |
ADC3 IN0 (analog only) |
A9 |
3.3 V |
ADC3 IN1 (analog only) |
A10 |
3.3 V |
ADC12 IN1 (analog only) |
A11 |
3.3 V |
ADC12 IN0 (analog only) |
DAC0 / A12 / D84 |
3.3 V |
DAC1 OUT1 / ADC12 IN18 (audio jack line‑out L) |
DAC1 / A13 / D85 |
3.3 V |
DAC1 OUT2 / TIM2 CH1 / SPI1 SCK / ADC12 IN19 (audio jack line‑out R) |
D89 |
3.3 V |
SPI1 MISO ( |
D90 |
3.3 V |
SPI1 MOSI ( |
D91 |
3.3 V |
SPI1 SCK ( |
CAN_RX / D93 |
3.3 V |
FDCAN2 RX / TIM3 CH2 / UART5 RX |
CAN_TX / D94 |
3.3 V |
FDCAN2 TX / SPI2 SCK / UART5 TX |
SDA1 / D102 |
3.3 V |
I2C4 SDA (display touch / camera control bus) |
SCL1 / D101 |
3.3 V |
I2C4 SCL (display touch / camera control bus) |
RESET |
3.3 V |
לחצו על כפתור ה‑RESET שעל הלוח או משכו ל‑GND כדי לאפס |
LED_RED |
3.3 V |
ערוץ אדום של נורית RGB (active low) |
LED_GREEN |
3.3 V |
ערוץ ירוק של נורית RGB (active low) |
LED_BLUE |
3.3 V |
ערוץ כחול של נורית RGB (active low) |
הערה
A8–A11 הם רפידות אנלוגיות בלבד על פיני ה‑_C של ה‑STM32H747 — אין להם פונקציית GPIO וניתן לקרוא אותם רק דרך ה‑ADC.
פיני מתח¶
פיני מחבר ה‑Mega:
VIN — כניסת 6–32 V. מזינה את הלוח דרך מווסת ה‑buck שעל הלוח.
+5V — מסילת 5 V המוזנת מ‑USB דרך דיודה או מווסת ה‑buck שעל הלוח.
+3V3 — מסילת 3.3 V הראשית.
IOREF — משקפת את מתח הקלט/פלט של הלוח (3.3 V).
AREF — ייחוס מתח אנלוגי עבור פיני ה‑ADC. ברירת המחדל היא 3.3 V; הזינו חיצונית כדי להשתמש בייחוס אחר.
OFF — משכו ל‑GND כדי לכבות את מסילת ה‑+3.3 V ולהשבית את המערכת.
VRTC — כניסת סוללת מטבע 3.0 V (3.3 V מקסימום) ששומרת על ה‑RTC שבשבב פעיל בזמן ששאר הלוח כבוי.
GND — הארקה משותפת.
ניתן להזין את ה‑Giga R1 דרך כל אחד מהמסלולים הבאים:
USB‑C — מספק 5 V למווסת ה‑buck שעל הלוח.
פין VIN — הזינו ספק מוסדר של 6–32 V ישירות.
טיפ
השתמשו במחשבון אורך חיי הסוללה כדי לדמות כמה זמן ה‑Giga R1 יפעל על סוללה עבור מחזור פעילות / שינה עמוקה נתון.
פיני שחזור ו‑debug¶
RESET — גם פין חשוף על מחבר המתח וגם מתג רגעי בחלק העליון של הלוח, מחוברים לקו ה‑NRST של ה‑SoC. משכו ל‑GND או לחצו על הכפתור כדי לאפס.
ה‑Giga R1 משתמש ב‑double‑tap reset הסטנדרטי של Arduino כדי להיכנס ל‑bootloader של Arduino. לחצו במהירות על כפתור ה‑RESET פעמיים — הלוח מתמספר מחדש דרך USB כהתקן DFU ו‑OpenMV IDE יכול לצרוב תמונת קושחה חדשה.
אם ה‑bootloader חסר לחלוטין, החזיקו את כפתור ה‑BOOT0 בזמן הלחיצה על RESET כדי לאלץ את ה‑SoC למצב ROM bootloader.
אותות ה‑SWD של ה‑STM32 מוצאים ב‑מחבר Cortex Debug בן 10 פינים בצעד 1.27 מ“מ בחזית הלוח. חברו אותם דרך SEGGER J‑Link, ST‑Link, או כל גשש JTAG/SWD סטנדרטי של ARM. כל אותות ה‑debug הם בייחוס 3.3 V.
התקנים היקפיים על הלוח¶
נוריות LED¶
ל‑Giga R1 יש נורית RGB יחידה למשתמש, הניתנת לשליטה תוכנתית דרך machine.LED
from machine import LED
LED("LED_RED").on()
LED("LED_GREEN").on()
LED("LED_BLUE").on()
נורית power נפרדת על הלוח נדלקת בכל פעם שמסילת ה‑+3.3 V פעילה ואינה ניתנת לשליטה על ידי המשתמש.
מחבר מצלמה (J6)¶
J6 הוא מחבר גמיש למצלמה תואם Arducam בן 22 פינים. חברו כל אחד ממודולי החיישנים הנתמכים והקושחה מזהה אותם אוטומטית דרך מודול הcsi — חיישני מצלמה
import csi
cam = csi.CSI()
cam.reset()
cam.pixformat(csi.RGB565)
cam.framesize(csi.QVGA)
cam.snapshot(time=2000) # let auto‑exposure settle
while True:
img = cam.snapshot()
חיישנים נתמכים:
OV5640 — 5 MP צבע, עד QSXGA (2592 × 1944).
OV7670 — 0.3 MP צבע, עד VGA (640 × 480).
GC2145 — 2 MP צבע, עד UXGA (1600 × 1200).
HM01B0 — מונוכרום 320 × 320.
HM0360 — מונוכרום VGA (640 × 480).
אזהרה
בזמן שהמצלמה מאותחלת, פיני מחבר ה‑Mega הבאים נתפסים על ידי הקושחה ואינם ניתנים לשימוש:
פין |
סיבה |
|---|---|
|
אותות נתונים + סנכרון של DCMI על המחבר הגמיש של המצלמה |
|
TIM1 CH3 — שעון אב של המצלמה |
|
GPIO של reset המצלמה |
|
GPIO של power‑down המצלמה |
|
I²C 4 — משותף עם המצלמה; האפיק שמיש אך הימנעו מכתובת ה‑I²C של החיישן |
למידת מכונה¶
ml — למידת מכונה מריץ מודלי TFLite מקוונטטים על ה‑Cortex‑M7 עם גרעיני CMSIS‑NN — מהיר מספיק עבור גלאים קומפקטיים בכמה פריימים לשנייה. מודלים על מערכת הקבצים לקריאה בלבד /rom נטענים ישירות מ‑flash ללא העתקה ל‑RAM. הנה גלאי BlazeFace בגודל 128×128 המכסה את הפנים שזוהו ואת ששת ציוני הדרך שלהן בכל פריים:
import csi
import time
import ml
from ml.postprocessing.mediapipe import BlazeFace
# Initialize the sensor.
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.VGA)
csi0.window((400, 400))
# Load built-in face detection model
model = ml.Model("/rom/blazeface_front_128.tflite", postprocess=BlazeFace(threshold=0.4))
print(model)
clock = time.clock()
while True:
clock.tick()
img = csi0.snapshot()
for r, score, keypoints in model.predict([img]):
ml.utils.draw_predictions(img, [r], ("face",), ((0, 0, 255),), format=None)
ml.utils.draw_keypoints(img, keypoints, color=(255, 0, 0))
print(clock.fps(), "fps")
ליבת M4¶
ליבת ה‑Cortex‑M4 נחשפת דרך openamp לתקשורת בין‑מעבדים. קושחת OpenMV רצה על ה‑M7 בלבד; ל‑M4 אין סביבת ריצה משלו של MicroPython, כך ששימוש בו מחייב בניית תמונת קושחה נפרדת ב‑C וטעינתה ממערכת הקבצים דרך openamp.RemoteProc. קושחת דוגמה בנויה מראש המממשת נקודת קצה של UART וירטואלי זמינה במאגר openamp_vuart — עקבו אחר ה‑README שלו כדי לבנות את vuart.elf
import openamp
import time
def ept_recv_callback(src_addr, data):
print("Received:", data.decode())
ept = openamp.Endpoint("vuart-channel", callback=ept_recv_callback)
rproc = openamp.RemoteProc("vuart.elf")
rproc.start()
count = 0
while True:
if ept.is_ready():
ept.send("Hello World %d!" % count, timeout=1000)
count += 1
time.sleep_ms(1000)
בפועל מוטב להתייחס לתמיכה זו כהדגמה של ממשק ה‑openamp ולא כפלטפורמה דו‑ליבתית פעילה — לא ניתן לאפס את ה‑M4 בנפרד מה‑M7, כך שעצירת ה‑M4 מאלצת אתחול מלא של המערכת.
תצוגה (J5)¶
J5 הוא מחבר MIPI‑DSI עבור ה‑Arduino Giga Display Shield — פאנל מגע קיבולי 480 × 800 הבנוי סביב מנהל הפאנל ST7701 ובקר המגע GT911. שני מנהלי ההתקן מסופקים מוקפאים עם הקושחה. השתמשו בdisplay — מנהל התקן תצוגה כדי לדחוף framebuffers ובgt911.GT911 עבור קלט מגע.
הדוגמה שלהלן משקפת את המצלמה לחלון תצוגה לאורך בגודל 800 × 480 ומכסה כל מגע כמעגל צבעוני:
import csi
import time
import image
import display
from gt911 import GT911
from machine import I2C
IMG_OFFSET = 80
touch_detected = False
points_colors = ((255, 0, 0), (0, 255, 0), (0, 0, 255),
(0, 255, 255), (255, 255, 0))
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.VGA)
lcd = display.DSIDisplay(
framesize=display.FWVGA,
portrait=True,
refresh=60,
controller=display.ST7701(),
)
# Pass pin names (not Pin objects) so the driver can flip
# the reset pin's direction during start-up.
touch = GT911(
I2C(4, freq=400_000),
reset_pin="D71",
irq_pin="D70",
touch_points=5,
refresh_rate=240,
reverse_x=True,
touch_callback=lambda pin: globals().update(touch_detected=True),
)
clock = time.clock()
while True:
clock.tick()
img = csi0.snapshot()
if touch_detected:
n, points = touch.read_points()
for i in range(n):
img.draw_circle(
(points[i][0] - IMG_OFFSET,
points[i][1],
points[i][2] * 3),
color=points_colors[points[i][3]],
thickness=2,
)
touch_detected = False
lcd.write(img, y=IMG_OFFSET, hint=image.TRANSPOSE | image.VFLIP)
print(clock.fps())
אזהרה
ה‑Giga Display Shield משתמש באותו אפיק I²C 4 (SDA1/SCL1) כמו המצלמה, ב‑D74 להפעלת תאורת הרקע של ה‑LCD, ב‑D70/D71 עבור ה‑IRQ וה‑reset של מגע ה‑GT911, וב‑D68/D69 עבור אותות ה‑TE וה‑RESET של פאנל ה‑DSI.
מיקרופון (Display Shield)¶
ה‑Arduino Giga Display Shield נושא מיקרופון דיגיטלי המחובר להתקן ההיקפי DFSDM של ה‑STM32H747 (שעון מיקרופון על D75, נתוני מיקרופון על D73). המיקרופון נקלט דרך audio — מודול אודיו. כל חוצץ (buffer) מגיע כ‑PCM bytearray של 16 ביט עם סימן, מוכן להזנה לulab/numpy לעיבוד אותות:
import audio
from ulab import numpy as np
def loudness(pcmbuf):
samples = np.array(np.frombuffer(pcmbuf, dtype=np.int16), dtype=np.float)
rms = np.sqrt(np.mean(samples ** 2))
if rms > 10000:
print("Loud!", int(rms))
audio.init(channels=1, frequency=16000, gain_db=24)
audio.start_streaming(loudness)
while True:
pass
IMU (Display Shield)¶
ה‑Arduino Giga Display Shield נושא IMU בעל 6 צירים מסוג Bosch BMI270 (מד תאוצה תלת‑ממדי + ג’ירוסקופ תלת‑ממדי) על אותו אפיק I²C 4 בכתובת 0x68. השתמשו במנהל ההתקן הקהילתי micropython_bmi270 כדי לקרוא אותו:
import time
from machine import I2C
from micropython_bmi270 import bmi270
sensor = bmi270.BMI270(I2C(4, freq=400_000))
sensor.load_config_file()
while True:
ax, ay, az = sensor.acceleration # m/s²
gx, gy, gz = sensor.gyro
print(ax, ay, az, gx, gy, gz)
time.sleep_ms(100)
מפת האוגרים המלאה נמצאת ב‑datasheet של BMI270.
נורית RGB (Display Shield)¶
ה‑Arduino Giga Display Shield נושא נורית RGB על הלוח המונעת על ידי מנהל נוריות תלת‑ערוצי ISSI IS31FL3197 על אותו אפיק I²C 4. פין ה‑AD של המנהל מחובר ל‑GND, כך שהוא יושב בכתובת I²C 0x50. השתמשו במנהל ההתקן הקהילתי IS31FL3197 כדי לשלוט בנורית:
from machine import I2C
from is31fl3197 import IS31FL3197
led = IS31FL3197(I2C(4, freq=400_000))
led.set_color(255, 0, 0) # full red
מפת האוגרים המלאה נמצאת ב‑datasheet של IS31FL3197.
Wi‑Fi¶
ה‑Murata 1DX (CYW4343W) שעל הלוח נחשף דרך network — הגדרת רשת כממשק תחנה. חברו את האנטנה המצורפת ל‑מחבר U.FL שעל הלוח לפני הפעלת הרדיו:
import network, time
wlan = network.WLAN(network.STA_IF)
wlan.active(True)
wlan.connect("ssid", "password")
while not wlan.isconnected():
time.sleep(1)
print("Wi‑Fi IP:", wlan.ipconfig("addr4")[0])
Bluetooth¶
אותו Murata 1DX חושף גם Bluetooth LE 5.1. השתמשו בaioble — BLE אסינכרוני עבור BLE ידידותי ל‑asyncio — לדוגמה, פרסמו כהתקן היקפי והמתינו שבקר מרכזי יתחבר:
import asyncio
import aioble
async def run():
while True:
conn = await aioble.advertise(250_000, name="Giga-R1")
print("Connected:", conn.device)
await conn.disconnected()
asyncio.run(run())
מדריך אפיקים¶
GPIO¶
השתמשו בmachine.Pin כדי לקרוא או להניע כל אחד מהפינים המסומנים בהדפס המשי. הפלטים הם 3.3 V CMOS ויכולים לשקוע/לספק עד 20 mA לפין (140 mA בסך הכול על פני כל המחבר).
from machine import Pin
out = Pin("D2", Pin.OUT)
out.on()
out.off()
out.value(1)
inp = Pin("D3", Pin.IN, Pin.PULL_UP)
print(inp.value())
כל פין קלט יכול גם להפעיל פסיקה במעברי קצה:
def handler(pin):
print("triggered:", pin)
Pin("D3", Pin.IN, Pin.PULL_UP).irq(
handler, Pin.IRQ_FALLING | Pin.IRQ_RISING,
)
UART¶
אפיק |
TX |
RX |
שם Arduino |
|---|---|---|---|
UART1 |
D1 |
D0 |
Serial1 |
UART6 |
D14 |
D15 |
Serial2 |
UART4 |
D16 |
D17 |
Serial3 |
UART2 |
D18 |
D19 |
Serial4 |
from machine import UART
uart = UART(1, baudrate=115200)
uart.write("hello")
uart.read(5)
I²C¶
אפיק |
SCL |
SDA |
|---|---|---|
I2C2 |
D21 |
D20 |
I2C1 |
D8 |
D9 |
I2C4 |
SCL1 |
SDA1 |
from machine import I2C
i2c = I2C(2, freq=400_000)
i2c.scan()
i2c.writeto(0x76, b"hi")
אפיק 2 (D20/D21, ה‑SCL/SDA המסומנים בהדפס המשי) הוא אפיק ה‑Wire של Arduino כברירת מחדל. אפיק 4 (SCL1/SDA1) משותף עם המצלמה ועם בקר המגע GT911 של ה‑Giga Display Shield — התקני משתמש על אפיק זה חייבים להימנע מהכתובות הבאות (7 ביט):
0x3C— OV5640 / GC21450x24— HM01B0 / HM03600x21— OV76700x5D— בקר המגע GT911 (Giga Display Shield)
ניתן להשתמש באותה חומרה גם במצב יעד (slave) דרך machine.I2CTarget כדי לחשוף אזור זיכרון לבקר I²C אחר:
from machine import I2CTarget
buf = bytearray(32)
target = I2CTarget(2, addr=0x42, mem=buf)
SPI¶
אפיק |
MOSI |
MISO |
SCK |
|---|---|---|---|
SPI1 |
D90 |
D89 |
D91 |
SPI5 |
D11 |
D12 |
D13 |
SPI1 מוצא על מחבר ייעודי בן 6 פינים בחזית הלוח. SPI5 מוצא על תוויות ה‑COPI/CIPO/SCK המסומנות בהדפס המשי על D11/D12/D13.
הערה
מיפוי הפינים של מחבר ה‑SPI1 הקדמי בן 6 הפינים (J7):
פין |
אות |
|---|---|
1 |
|
2 |
+5V |
3 |
|
4 |
|
5 |
NRST |
6 |
GND |
from machine import SPI
from machine import Pin
spi = SPI(5, baudrate=10_000_000)
cs = Pin("D10", Pin.OUT, value=1) # CS is not driven by the SPI peripheral
cs.value(0)
spi.write(b"hello")
cs.value(1)
CAN (FDCAN)¶
אפיק |
TX |
RX |
|---|---|---|
FDCAN2 |
D94 |
D93 |
from machine import CAN
can = CAN(2, 500_000)
can.set_filters(None)
can.send(0x123, b"\xDE\xAD\xBE\xEF")
print(can.recv())
ADC¶
ה‑Giga R1 חושף שנים‑עשר ערוצי ADC של 12 ביט על A0–A11, כולם בייחוס 3.3 V — read_u16 מחזיר 0–65535 על פני 0–3.3 V בפין. A8–A11 הם רפידות _C אנלוגיות בלבד ללא התקן GPIO היקפי:
from machine import ADC
import time
adc = ADC("A0")
while True:
voltage = adc.read_u16() * 3.3 / 65535
print(voltage)
time.sleep_ms(100)
הערה
A7 מחובר גם ל‑כניסת המיקרופון בשקע האודיו TRRS 3.5 מ“מ — כשאוזניות מחוברות, ADC("A7") קורא את אות המיקרופון האנלוגי ישירות.
DAC¶
שני ערוצי DAC של 12 ביט מוצאים על DAC0 ו‑DAC1 דרך pyb.DAC. שניהם מחוברים לשקע האודיו TRRS 3.5 מ“מ כערוצי ה‑line‑out השמאלי והימני:
from pyb import DAC
left = DAC("DAC0")
right = DAC("DAC1")
left.write(int(0.5 * 255)) # 8‑bit, ~1.65 V
right.write(int(0.5 * 255))
PWM¶
פין |
טיימר / ערוץ |
|---|---|
D0 |
TIM4 CH2 / TIM17 CH1N |
D1 |
TIM1 CH2 |
D2 |
TIM2 CH4 / TIM5 CH4 / TIM15 CH2 |
D3 |
TIM2 CH3 / TIM5 CH3 / TIM15 CH1 |
D4 |
TIM1 CH3N / TIM8 CH1 |
D5 |
TIM1 CH1N / TIM3 CH2 / TIM8 CH1N / TIM14 CH1 |
D6 |
TIM4 CH2 |
D7 |
TIM3 CH1 |
D8 |
TIM4 CH3 / TIM16 CH1 |
D9 |
TIM4 CH4 / TIM17 CH1 |
D10 |
TIM1 CH1 / TIM8 CH3N |
D11 |
TIM1 CH2N / TIM8 CH2 |
D12 |
TIM1 CH2 / TIM8 CH2N |
D13 |
TIM12 CH1 |
D15 |
TIM3 CH2 / TIM8 CH2 |
D16 |
TIM8 CH1N |
D20 |
TIM2 CH4 |
D37 |
TIM8 CH2 |
D38 |
TIM8 CH2N |
D40 |
TIM15 CH2 |
D46 |
TIM8 CH3N |
D48 |
TIM1 CH1N / TIM8 CH3 |
D51 |
TIM15 CH1 |
D54 |
TIM8 CH1 |
D56 |
TIM3 CH1 / TIM13 CH1 |
D57 |
TIM1 CH3 / TIM8 CH1N |
D58 |
TIM8 CH3 |
D59 |
TIM8 CH2 |
D61 |
TIM8 CH2N |
D63 |
TIM5 CH2 |
D64 |
TIM5 CH1 |
D65 |
TIM12 CH2 |
D68 |
TIM3 CH1 / TIM8 CH1 |
D69 |
TIM5 CH4 |
D71 |
TIM8 CH4 |
D78 / A2 |
TIM1 CH2N / TIM3 CH3 / TIM8 CH2N |
D79 / A3 |
TIM1 CH3N / TIM3 CH4 / TIM8 CH3N |
D83 / A7 |
TIM2 CH1 / TIM5 CH1 |
D85 / A13 |
TIM2 CH1 / TIM8 CH1N |
הניעו כל אחד מהם דרך machine.PWM
from machine import Pin, PWM
pwm = PWM(Pin("D2"), freq=1_000, duty_u16=32768)
אזהרה
TIM1 שמור עבור שעון אב של המצלמה כשהמצלמה מאותחלת דרך csi — חיישני מצלמה. פינים שפונקציית ה‑PWM היחידה שלהם היא על TIM1 — D1, D10, D11, D12 — אינם ניתנים להנעת PWM בזמן שהמצלמה פעילה. שאר הפינים המפורטים כולם בעלי חלופות שאינן TIM1.
הערה
מספר פינים חולקים ערוצי טיימר:
TIM2 CH4 נמצא על
D2וגם עלD20.TIM2 CH1 נמצא על
D83/A7וגם עלD85/A13.TIM3 CH1 נמצא על
D7,D56, וגם עלD68.TIM3 CH2 נמצא על
D5וגם עלD15.TIM4 CH2 נמצא על
D0וגם עלD6.TIM5 CH1 נמצא על
D64וגם עלD83/A7.TIM5 CH4 נמצא על
D2וגם עלD69.TIM8 CH1 נמצא על
D4,D54, וגם עלD68.TIM8 CH1N נמצא על
D5,D16,D57, וגם עלD85/A13.TIM8 CH2 נמצא על
D11,D15,D37, וגם עלD59.TIM8 CH2N נמצא על
D12,D38,D61, וגם עלD78/A2.TIM8 CH3 נמצא על
D48וגם עלD58.TIM8 CH3N נמצא על
D10,D46, וגם עלD79/A3.TIM15 CH1 נמצא על
D3וגם עלD51.TIM15 CH2 נמצא על
D2וגם עלD40.
בחרו צרכן אחד לכל ערוץ טיימר.
אפיקים תוכנתיים בשיטת bit‑bang¶
machine.SoftI2C ו‑machine.SoftSPI עובדים על כל GPIO אם אתם זקוקים לאפיק נוסף.
חיישן תרמי (חיצוני ללוח)¶
הקושחה כוללת את מנהל ההתקן fir — מנהל התקן לחיישן תרמי (fir == far infrared) עבור מצלמות תרמיות המחוברות חיצונית:
MLX90621 — מערך IR בגודל 16 × 4
MLX90640 — מערך IR בגודל 32 × 24
MLX90641 — מערך IR בגודל 16 × 12
AMG8833 — מערך IR בגודל 8 × 8
חברו את המודול לאפיק ה‑I²C של הלוח וקראו פריימים עם fir.init() + fir.snapshot()
import time
import image
import fir
fir.init() # auto‑detects the sensor
clock = time.clock()
while True:
clock.tick()
try:
img = fir.snapshot(x_scale=5, y_scale=5,
color_palette=image.PALETTE_IRONBOW,
hint=image.BICUBIC,
copy_to_fb=True)
except OSError:
continue
print(clock.fps())
מנהל ההתקן fir מתקשר עם החיישן רק דרך I²C 1 — חברו את המודול ל‑D8 (SCL) ול‑D9 (SDA).
תזמון¶
time¶
מודול הtime מכסה השהיות חוסמות, טיקים מונוטוניים ומדידת זמן שחלף:
import time
time.sleep(1) # seconds
time.sleep_ms(500)
time.sleep_us(10)
start = time.ticks_ms()
# ...do work...
elapsed = time.ticks_diff(time.ticks_ms(), start)
טיימרים וירטואליים¶
machine.Timer מתזמן פונקציות callback מחזוריות או חד‑פעמיות מבלי לצרוך משבצת טיימר חומרתי. העבירו -1 כמזהה כדי להשתמש בטיימר וירטואלי (תוכנתי):
from machine import Timer
one_shot = Timer(-1)
one_shot.init(period=5_000, mode=Timer.ONE_SHOT,
callback=lambda t: print("once"))
periodic = Timer(-1)
periodic.init(period=2_000, mode=Timer.PERIODIC,
callback=lambda t: print("tick"))
ערכי המחזור הם במילישניות. קראו לdeinit() כדי לעצור ולשחרר את המשבצת.
שעון זמן אמת¶
machine.RTC שומר על זמן שעון הקיר על פני אתחולים — וגם על פני כיבוי מלא כשסוללת מטבע מחוברת לפין VRTC
from machine import RTC
rtc = RTC()
rtc.datetime((2026, 4, 30, 4, 12, 0, 0, 0)) # Y, M, D, weekday, h, m, s, subsec
print(rtc.datetime())
Watchdog¶
machine.WDT מאפס את הלוח אם היישום נתקע. לאחר ההפעלה לא ניתן לעצור אותו או להגדירו מחדש — הזינו אותו מעת לעת בתוך הלולאה הראשית שלכם:
from machine import WDT
wdt = WDT(timeout=5_000) # 5 second window
while True:
# ...do work...
wdt.feed()
מידע על אתחול וזמן ריצה¶
עדכון קושחה (DFU)¶
ה‑Giga R1 משתמש ב‑double‑tap reset הסטנדרטי של Arduino כדי להיכנס ל‑bootloader של Arduino. לחצו במהירות על כפתור ה‑RESET פעמיים — הלוח מתמספר מחדש דרך USB כהתקן DFU ו‑OpenMV IDE יכול לצרוב תמונת קושחה חדשה. אם ה‑bootloader חסר לחלוטין, החזיקו את כפתור ה‑BOOT0 בזמן הלחיצה על RESET כדי לאלץ את ה‑SoC למצב ROM bootloader.
סקריפט פעיל יכול להיכנס מחדש ל‑bootloader לפי דרישה על ידי קריאה לmachine.bootloader()
import machine
machine.bootloader()
מערכת קבצים וסדר אתחול¶
קושחת ה‑Giga R1 מעגנת עד שתי מערכות קבצים באתחול:
Flash פנימי — תמיד מעוגן ב‑
/flash. מכיל אתmain.pyואתREADME.txtכברירת מחדל; נוצר באתחול הראשון ממש.ROMFS — מערכת קבצים לקריאה בלבד הממופה לזיכרון ב‑
/rom, מעוגנת אוטומטית על ידי MicroPython באתחול.
לאחר העיגון, ספריית העבודה מוגדרת ל‑/flash. המפרש מריץ אז סקריפטים מאותה ספרייה:
boot.pyמורץ בכל איפוס רך (אתחול קר,Ctrl‑Dמה‑REPL, או בכל פעם שהסקריפט הפעיל מסתיים).main.pyמורץ רק באתחול קר, מיד לאחרboot.py. איפוסים רכים עוקבים מריצים מחדש אתboot.pyאך עוברים ישירות ל‑REPL — כדי להריץ מחדש אתmain.pyעליכם לאפס את הלוח באופן מלא.
ה‑main.py המוגדר כברירת מחדל המסופק על לוח שזה עתה נצרב פשוט מהבהב את הערוץ הכחול של נורית ה‑RGB למשתמש כפעימת לב (שני פולסים קצרים, מרווח קצר), כך שתוכלו לדעת שהקושחה אותחלה כראוי ללא מארח מחובר.
sys.path מורחב כך שיכלול את שתי מערכות הקבצים ואת תת‑הספריות lib/ שלהן, כך שמודולים הניתנים לייבוא יכולים להתגורר ב‑/flash/lib או ב‑/rom/lib.
כשמחובר דרך USB, /flash מתמספר גם ככונן אחסון USB במארח, ומאפשר לכם לערוך את boot.py, main.py וכל קובץ אחר ישירות. הוציאו את הכונן לפני איפוס הלוח כדי שהמארח ישטוף את הכתיבות המאוחסנות שלו במטמון.
הערה
מכיוון שמערכת ההפעלה מתייחסת לכונן כהתקן בלוקים פסיבי, קבצים שנוצרו או שונו על ידי קוד הרץ על המצלמה לא יופיעו עד שהמארח יעגן מחדש את הכונן. אם גם מערכת ההפעלה וגם המצלמה כותבות לאותה מערכת קבצים בו‑זמנית, מערכת ההפעלה תנצח ותדרוס שינויים שביצעה המצלמה.
הערה
הערוץ האדום של נורית ה‑RGB למשתמש עשוי להידלק לרגע בזמן שהמארח קורא או כותב לכונן אחסון ה‑USB — זהו מחוון פעילות מונע‑קושחה, לא תקלה.
גדלי אחסון¶
ה‑Giga R1 מסופק עם:
/flash— מערכת קבצים FAT בגודל 11 MB, קריאה/כתיבה./rom— ROMFS בגודל 4 MB לקריאה בלבד הממופה לזיכרון, המשמש לשילוח סקריפטים ומודלי ML שנהנים מגישת mmap ללא העתקה.
מחוון hard‑fault¶
אם נורית ה‑RGB למשתמש עוברת במהירות בין כל הצבעים — מהר מספיק עד שהיא נוטה להיראות כנורית לבנה מנצנצת ולא כגוונים נפרדים — הקושחה נתקלה ב‑hard fault בלתי ניתן לשחזור. צרבו מחדש את הקושחה כדי להתאושש; אם צריבה מחדש אינה עוזרת, ייתכן שהלוח ניזוק פיזית.
ספריות תוכנה¶
ראו את אינדקס הספרייה לרשימה המלאה של המודולים — כולל אילו מהם ייחודיים לבניית ה‑Giga R1.