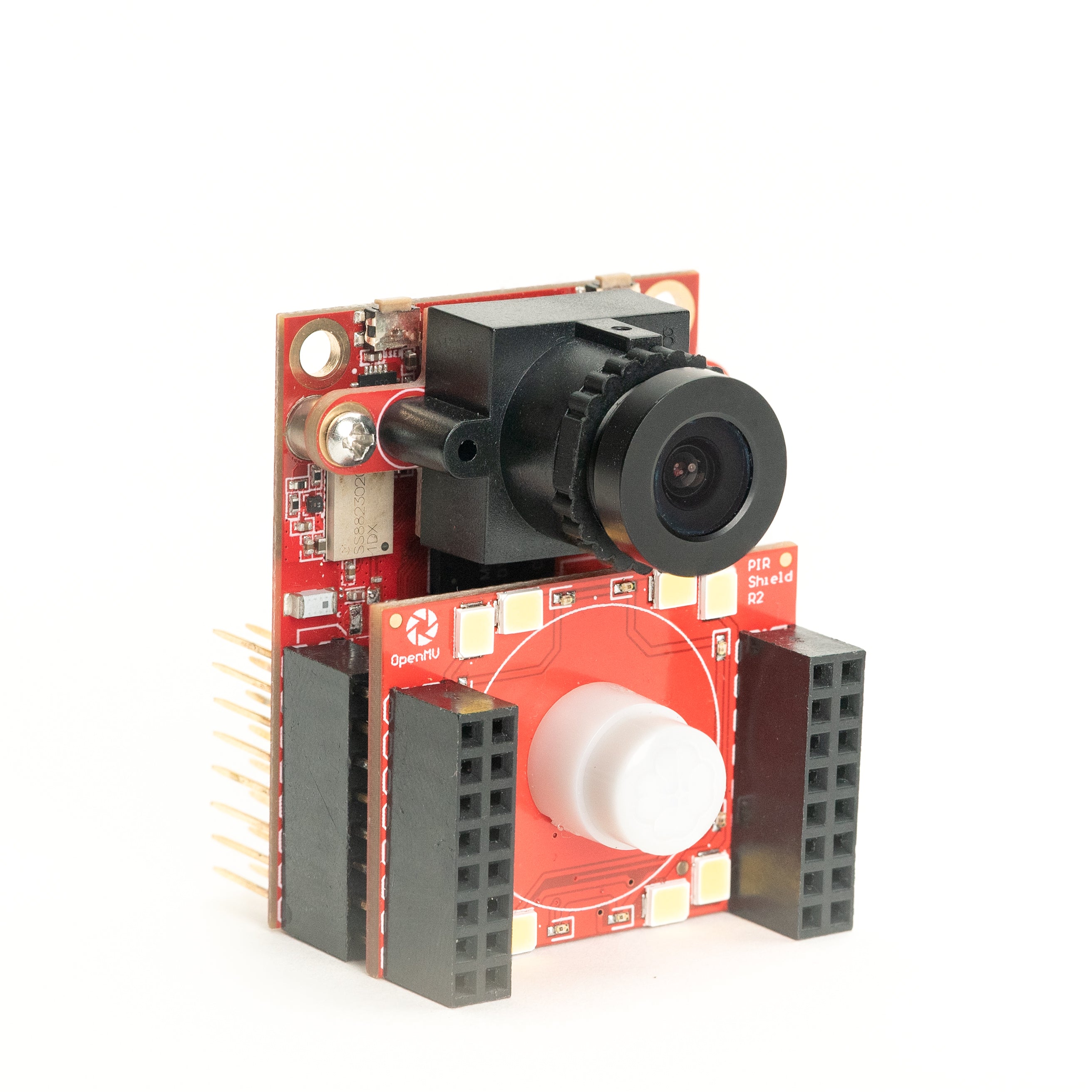
PIR Shield¶
PIR Shield đánh thức OpenMV Cam khỏi trạng thái ngủ sâu khi phát hiện chuyển động, tiêu thụ cực thấp chỉ 6 µA ở chế độ chờ, và trang bị thêm tám đèn LED trắng cùng tám đèn LED hồng ngoại 850 nm để chiếu sáng. Lý tưởng cho camera giám sát và camera theo dõi động vật chạy bằng pin.
Để xem datasheet đầy đủ, ảnh và đặt hàng, hãy xem trang sản phẩm PIR Shield.
Tính năng nổi bật¶
Cảm biến PIR chờ 6 µA cho phép hoạt động bằng pin trong nhiều năm
Tám đèn LED trắng 3500 K và tám đèn LED hồng ngoại 850 nm (điều chỉnh độ sáng bằng PWM)
Sơ đồ chân¶
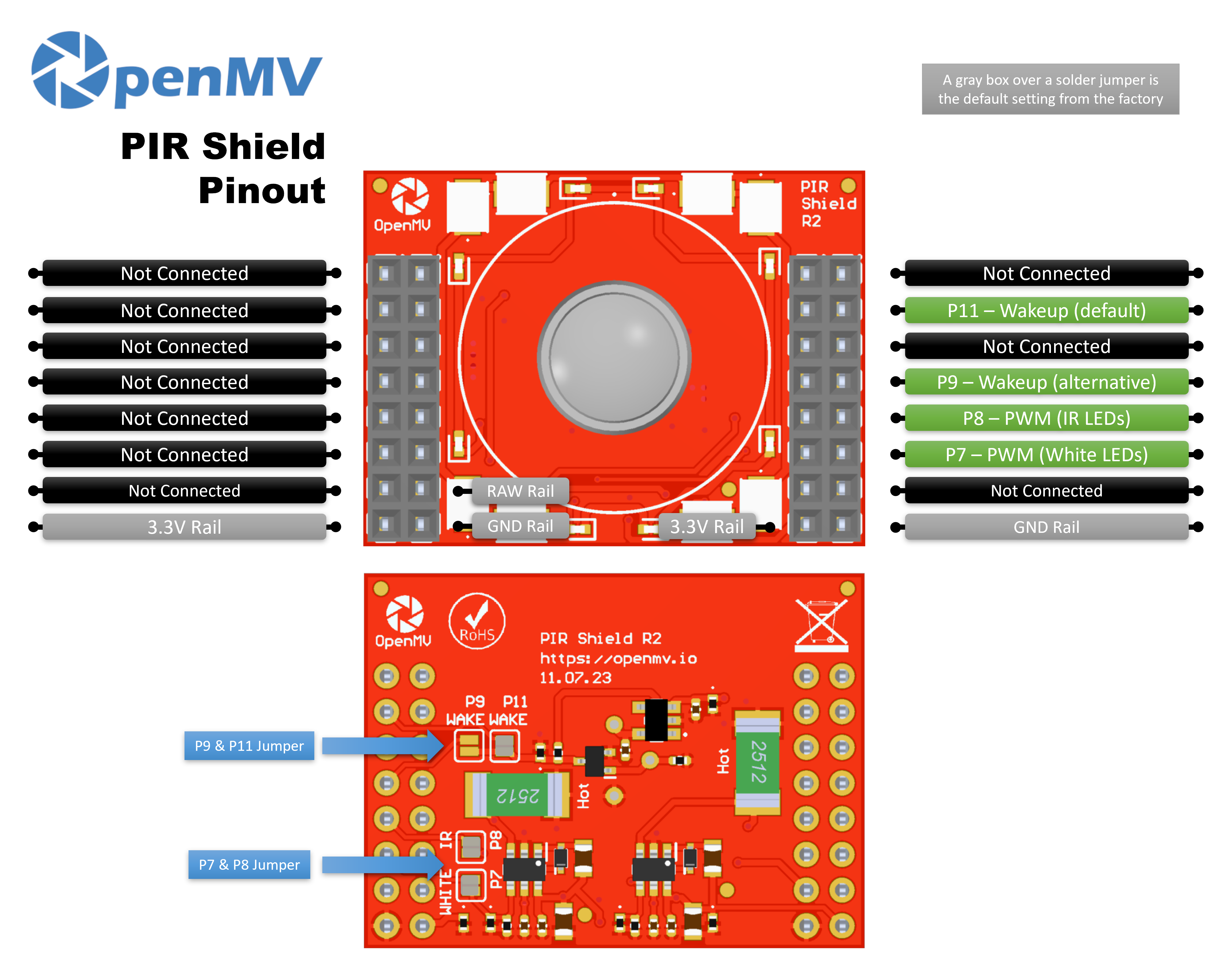
Tham chiếu chân¶
Chân |
Chức năng |
|---|---|
P7 |
Điều khiển PWM cho đèn LED trắng |
P8 |
Điều khiển PWM cho đèn LED hồng ngoại 850 nm |
P9 |
Đánh thức (thay thế) |
P11 |
Đánh thức (mặc định) — kéo xuống mức thấp khi PIR phát hiện chuyển động |
Rail RAW |
Nguồn điện luôn bật cho cảm biến PIR — duy trì khả năng phát hiện chuyển động khi camera đang ngủ sâu |
Rail 3.3V |
Cấp nguồn cho mạch điện tử trên bo mạch của shield |
Rail GND |
Chân đất chung |
Ghi chú
Mỗi chân P7, P8, P9 và P11 đều có thể được thu hồi để sử dụng cho mục đích khác. P7, P8 và P11 được kết nối theo mặc định thông qua các jumper hàn ở mặt sau — mở jumper trên bất kỳ chân nào bạn muốn giải phóng. P9 mặc định là ngắt kết nối: bắc cầu jumper ở mặt sau để dẫn tín hiệu đánh thức đến P9 thay thế (và mở jumper ở mặt sau của P11 để giải phóng P11).
Ghi chú
P11 là chân đánh thức trên tất cả các OpenMV Cam đời mới — hãy để shield ở cấu hình mặc định để deepsleep() hoạt động khi phát hiện chuyển động. Phương án thay thế P9 dành cho các OpenMV Cam đời cũ, vốn không có đường đánh thức riêng — P9 được gắn vào một GPIO thông thường mà bạn có thể thăm dò hoặc gắn IRQ vào.
Sử dụng¶
Điều chỉnh độ sáng bằng PWM cho đèn LED trắng và hồng ngoại:
from machine import PWM, Pin
white = PWM(Pin("P7"), freq=50_000, duty_u16=0)
ir = PWM(Pin("P8"), freq=50_000, duty_u16=0)
white.duty_u16(32_768) # 50% white
ir.duty_u16(16_384) # 25% IR
Đánh thức camera khỏi trạng thái ngủ sâu khi phát hiện chuyển động. P11 (đường đánh thức mặc định) kéo xuống mức thấp khi PIR kích hoạt và khởi động lại camera:
from machine import deepsleep
deepsleep() # the next motion event resets the camera