PIR Shield¶
PIR Shield ปลุก OpenMV Cam จากโหมดสลีปลึกเมื่อตรวจพบการเคลื่อนไหว ใช้กระแสไฟต่ำมากเพียง 6 µA ในโหมดสแตนด์บาย และมี LED สีขาวแปดดวงพร้อม LED อินฟราเรด 850 nm อีกแปดดวงสำหรับให้แสงสว่าง เหมาะสำหรับกล้องเฝ้าระวังและกล้องล่าสัตว์ที่ใช้แบตเตอรี่
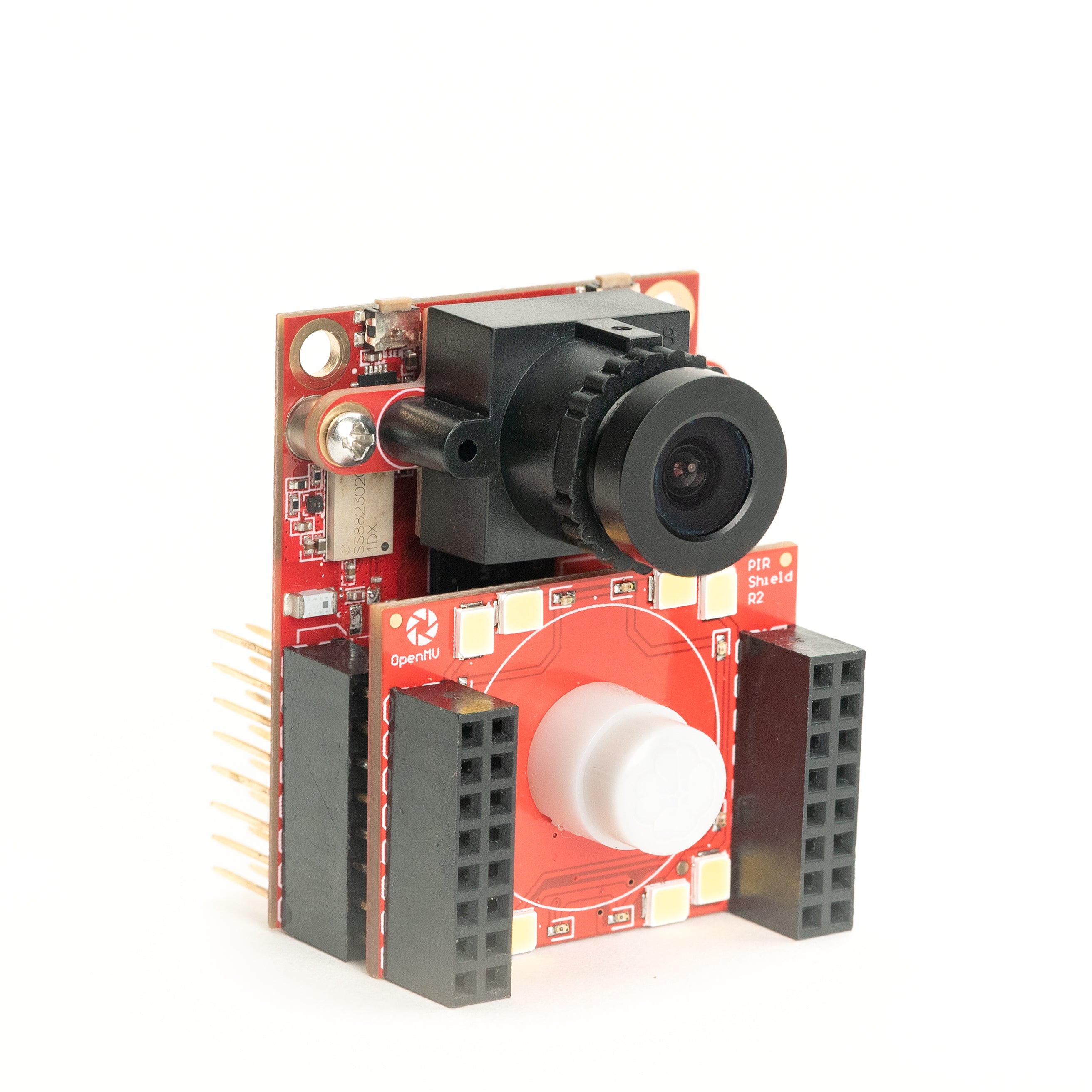
สำหรับข้อมูลจำเพาะเต็ม ภาพถ่าย และการสั่งซื้อ ดูที่ หน้าผลิตภัณฑ์ PIR Shield
จุดเด่น¶
PIR sensor สแตนด์บาย 6 µA สำหรับการทำงานด้วยแบตเตอรี่นานหลายปี
LED สีขาว 3500 K แปดดวงและ LED อินฟราเรด 850 nm แปดดวง (ปรับความสว่างด้วย PWM)
แผนผังพิน¶
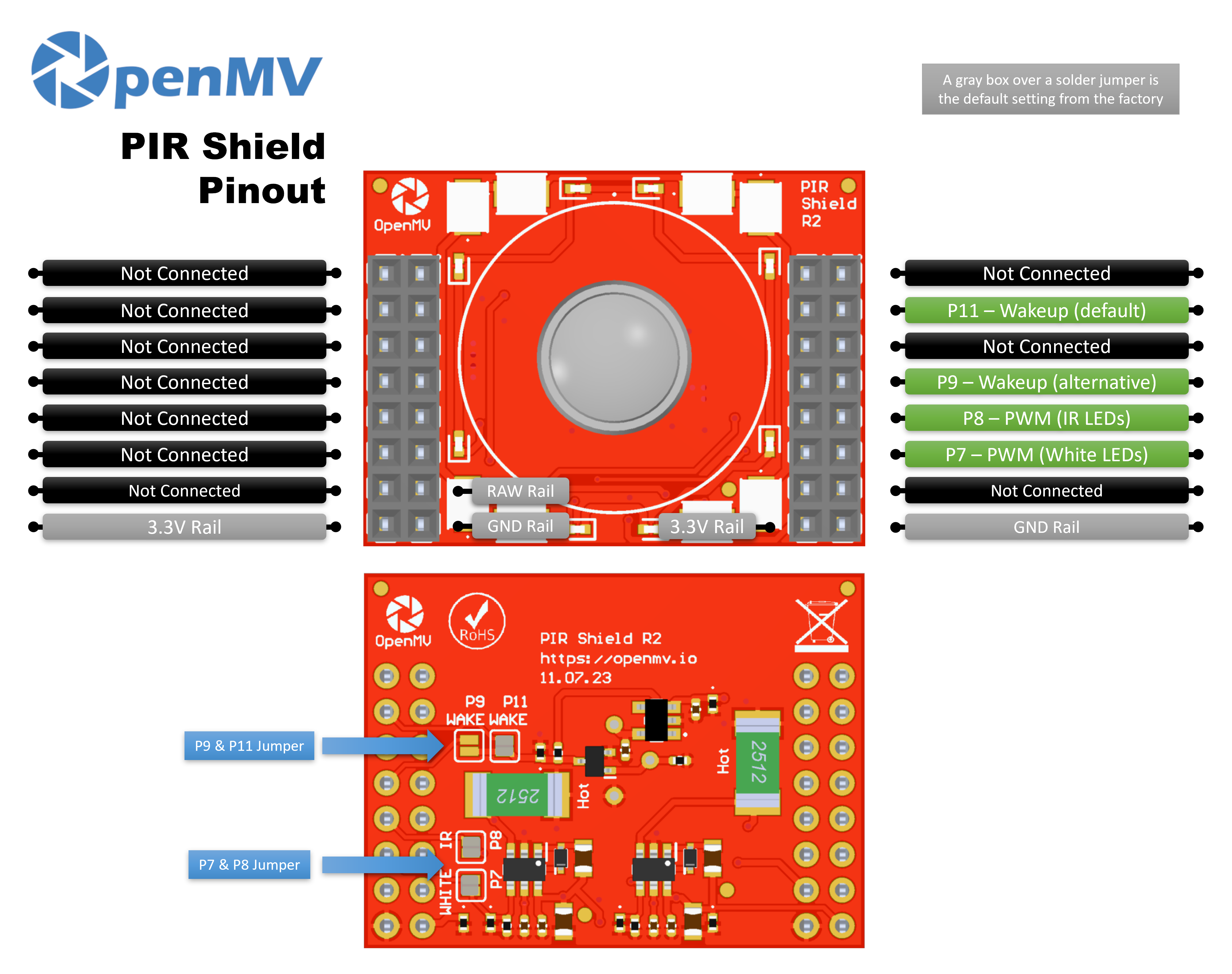
อ้างอิงพิน¶
พิน |
หน้าที่ |
|---|---|
P7 |
ควบคุม PWM สำหรับ LED สีขาว |
P8 |
ควบคุม PWM สำหรับ LED อินฟราเรด 850 nm |
P9 |
ปลุกเครื่อง (ทางเลือก) |
P11 |
ปลุกเครื่อง (ค่าเริ่มต้น) — ดึงต่ำเมื่อ PIR ตรวจพบการเคลื่อนไหว |
ขา RAW |
จ่ายไฟตลอดเวลาให้ PIR sensor — รักษาการตรวจจับการเคลื่อนไหวให้ทำงานอยู่ขณะกล้องอยู่ในโหมดสลีปลึก |
ขา 3.3V |
จ่ายไฟให้วงจรอิเล็กทรอนิกส์บนบอร์ดของ shield |
ขา GND |
กราวด์ร่วม |
Note
พิน P7, P8, P9 และ P11 แต่ละตัวสามารถนำไปใช้งานอื่นได้ P7, P8 และ P11 เชื่อมต่อเป็นค่าเริ่มต้นผ่านจัมเปอร์บัดกรีด้านหลัง — เปิดจัมเปอร์ของพินที่ต้องการปลดออก P9 ค่าเริ่มต้นคือไม่ได้เชื่อมต่อ: บัดกรีจัมเปอร์ด้านหลังเพื่อเชื่อมสัญญาณปลุกเครื่องไปที่ P9 แทน (และเปิดจัมเปอร์ด้านหลังของ P11 เพื่อปลด P11)
Note
P11 คือพินปลุกเครื่องบน OpenMV Cam รุ่นใหม่ทุกรุ่น — ปล่อยให้ shield ใช้การแมปค่าเริ่มต้นสำหรับการปลุกเครื่องจากโหมด deepsleep() เมื่อตรวจพบการเคลื่อนไหว ทางเลือก P9 มีไว้สำหรับ OpenMV Cam รุ่นเก่าที่ไม่มีสายปลุกเครื่องเฉพาะ — P9 ต่อกับ GPIO ปกติที่คุณจะต้องโพลหรือผูก IRQ แทน
การใช้งาน¶
ปรับความสว่าง LED สีขาวและ IR ด้วย PWM:
from machine import PWM, Pin
white = PWM(Pin("P7"), freq=50_000, duty_u16=0)
ir = PWM(Pin("P8"), freq=50_000, duty_u16=0)
white.duty_u16(32_768) # 50% white
ir.duty_u16(16_384) # 25% IR
ปลุกกล้องจากโหมดสลีปลึกเมื่อตรวจพบการเคลื่อนไหว P11 (สายปลุกเครื่องค่าเริ่มต้น) ดึงต่ำเมื่อ PIR ทำงานและรีเซ็ตกล้อง:
from machine import deepsleep
deepsleep() # the next motion event resets the camera