Pan and Tilt Shield¶
Pan and Tilt Shield มอบช่องเซอร์โวสามช่องพร้อม NCP1117 ตัวควบคุมแรงดันเชิงเส้น 5 V ที่จ่ายไฟให้ทั้งกล้องและเซอร์โวจากแบตเตอรี่ขนาด 6.5–18 V เส้นเดียวให้กับ OpenMV Cam
ดูข้อมูลทางเทคนิคฉบับเต็ม รูปภาพ และการสั่งซื้อได้ที่ หน้าผลิตภัณฑ์ Pan and Tilt Shield
คุณสมบัติเด่น¶
ช่องเซอร์โวอิสระสามช่อง
เชื่อมกับ Servo Shield ได้
การจัดเรียงพิน¶
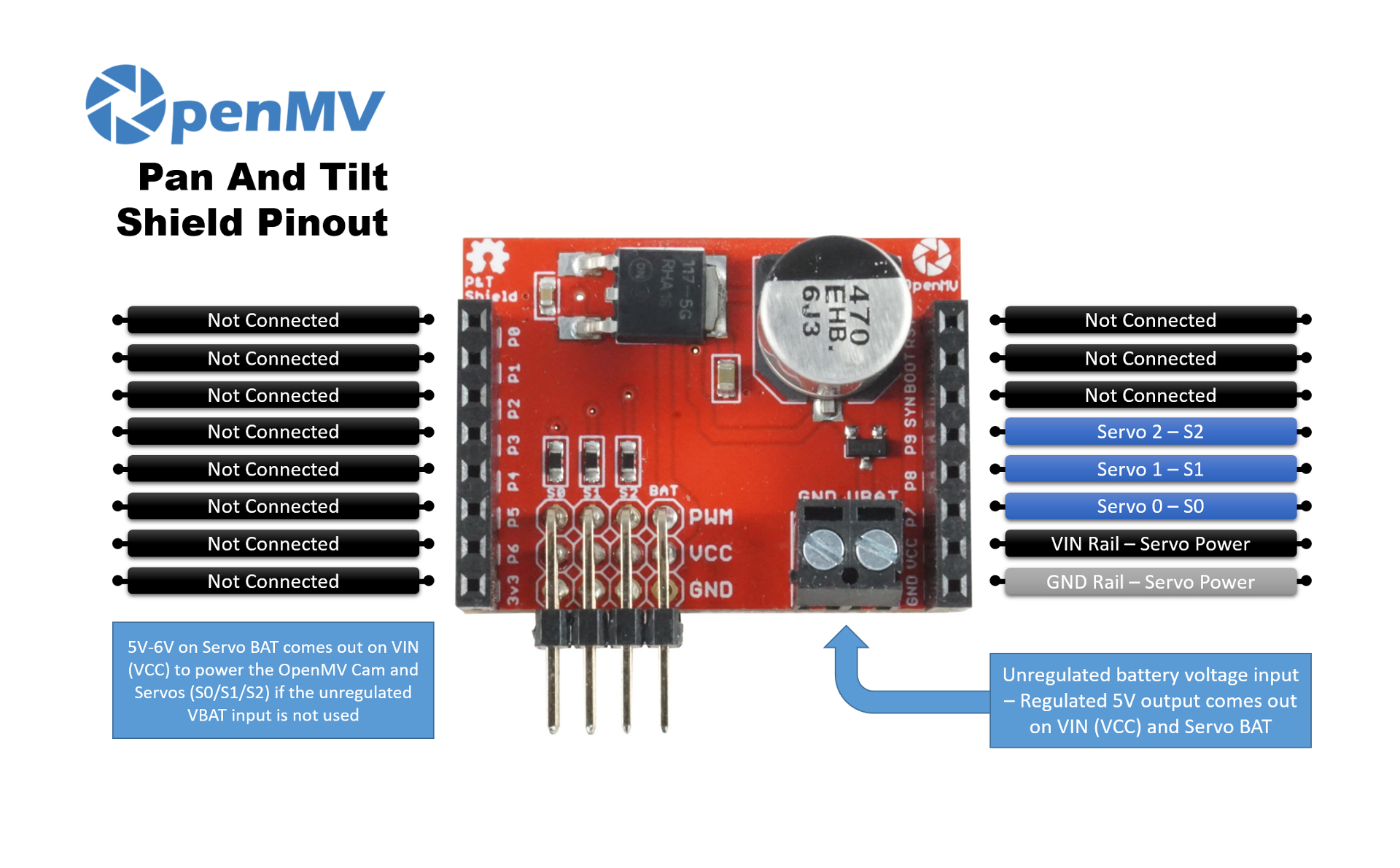
ข้อมูลอ้างอิงพิน¶
พิน |
ฟังก์ชัน |
|---|---|
P7 |
Servo 0 (S0) |
P8 |
Servo 1 (S1) |
P9 |
Servo 2 (S2) |
VBAT in |
อินพุตแบตเตอรี่ 6.5–18 V บนขั้วต่อแบบสกรู (ขีดจำกัด NCP1117) |
VIN out |
5 V ที่ควบคุมจาก NCP1117 บนบอร์ด — จ่ายไฟให้ทั้งกล้องและราง servo |
GND rail |
กราวด์ร่วมของ servo และกล้อง |
การใช้งาน¶
ขับช่องเซอร์โวสามช่องด้วย PWM 50 Hz ช่วงความกว้างพัลส์แตกต่างกันระหว่างเซอร์โว ดังนั้นปรับ MIN_US และ MAX_US ให้ตรงกับของคุณ — ค่าทั่วไปอยู่ที่ประมาณ 1000–2000 µs:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)