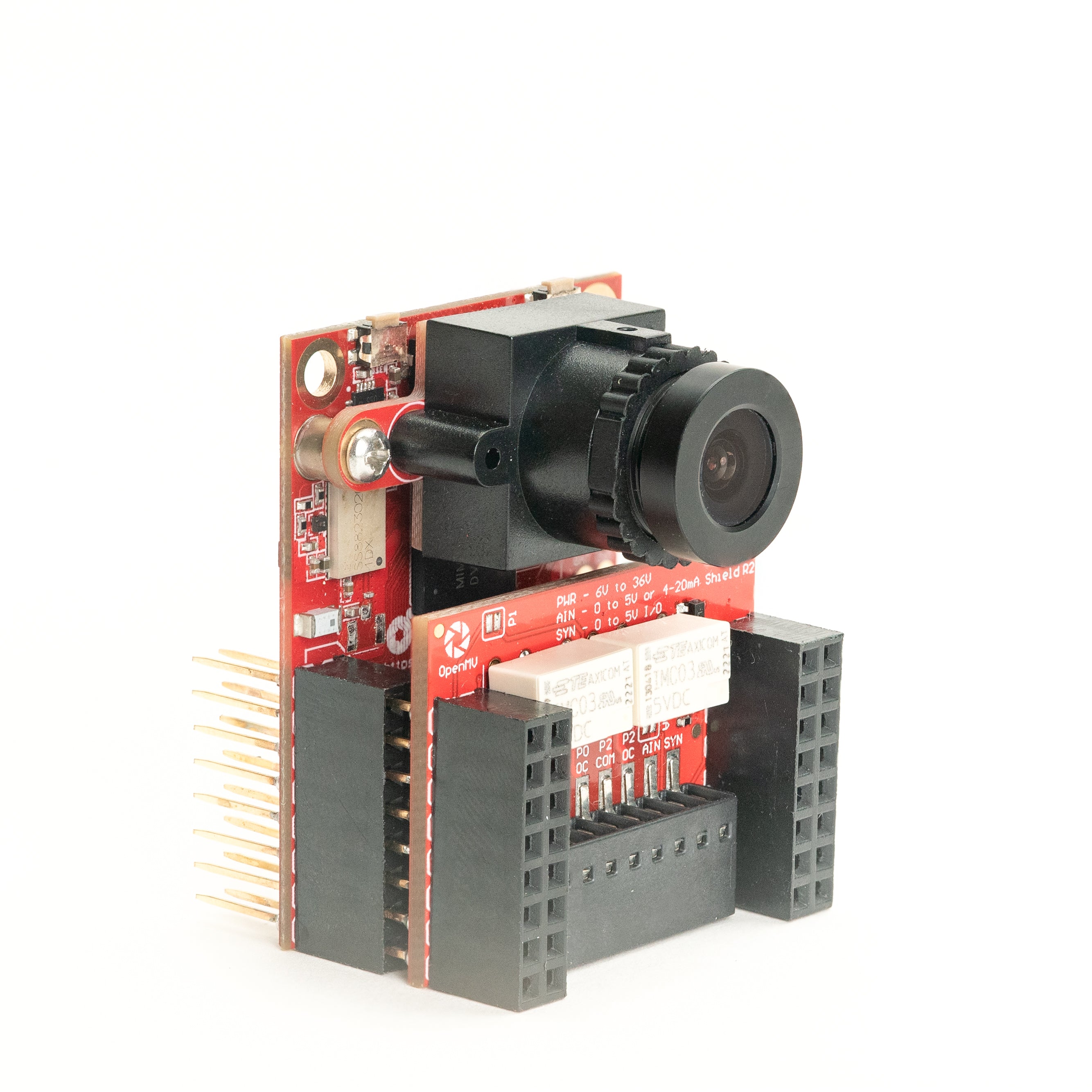
Relay Shield¶
Relay Shield สวิตช์โหลด AC หรือ DC กำลังสูงสองชุดได้สูงสุด 60 W ต่อรีเลย์จาก OpenMV Cam พร้อมอินพุต 6-36 V รวมถึงอินพุต ADC และสาย I/O ดิจิทัลสำหรับการซิงค์
สำหรับข้อมูลจำเพาะเต็ม ภาพถ่าย และการสั่งซื้อ ดูที่ หน้าผลิตภัณฑ์ Relay Shield
จุดเด่น¶
รีเลย์คู่ — 60 W แต่ละตัว (15-220 V DC, 125-260 V AC)
อินพุต 6-36 V พร้อมการป้องกันแรงดันไฟย้อน
อินพุต ADC 0-5 V พร้อมการป้องกันแรงดันเกิน ±36 V
I/O ดิจิทัล 0-5 V สำหรับทริกเกอร์ซิงค์กล้อง
แผนผังพิน¶
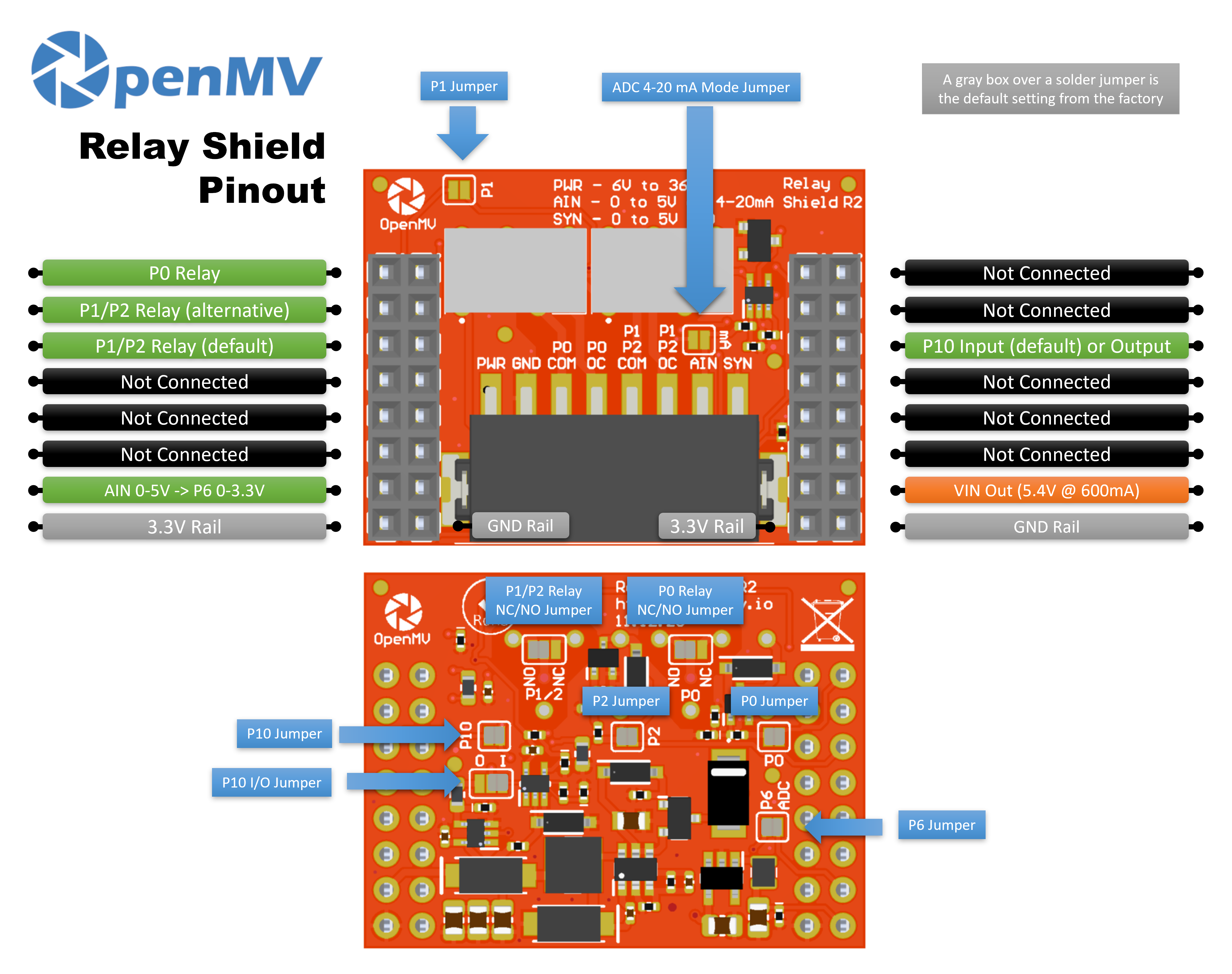
อ้างอิงพิน¶
พิน |
หน้าที่ |
|---|---|
P0 |
ควบคุมรีเลย์ 1 |
P1 |
ควบคุมรีเลย์ 2 (ทางเลือก) |
P2 |
ควบคุมรีเลย์ 2 (ค่าเริ่มต้น) |
P6 |
รีดแบ็ค AIN ที่เปลี่ยนระดับแล้ว (0–3.3 V บน P6) |
P10 |
SYN — I/O ดิจิทัล open-drain บนบล็อกเทอร์มินัล |
PWR เข้า |
อินพุตกว้าง 6–36 V บนบล็อกเทอร์มินัล (ทนแรงดันไฟย้อน) |
AIN เข้า |
อินพุตอนาล็อกบนบล็อกเทอร์มินัล |
VIN ออก |
5.4 V ที่กระแสสูงสุด 600 mA จากตัวควบคุมบนบอร์ด |
ขา 3.3V |
จ่ายไฟให้วงจรอิเล็กทรอนิกส์บนบอร์ดของ shield |
ขา GND |
กราวด์ร่วม |
Note
AIN ได้รับการป้องกันแรงดันเกินสูงสุด ±36 V และค่าเริ่มต้นคืออินพุตแรงดัน 0–5 V ลดระดับลงเป็น 0–3.3 V บน P6 บัดกรีชันท์โหมด 4–20 mA ด้านหน้า shield เพื่อสลับ AIN เป็นอินพุตวงจรกระแส 4–20 mA
Note
SYN เป็นสายดิจิทัล open-drain ดึงขึ้นไปที่ 3.3 V ฝั่งกล้องและ 5 V ฝั่งเทอร์มินัล SYN ค่าเริ่มต้นคืออินพุต — shield เปลี่ยนระดับ 0–5 V บน SYN ลงเป็น 0–3.3 V บน P10 เปลี่ยนจัมเปอร์บัดกรีบนบอร์ดเพื่อกลับ P10 เป็นเอาต์พุต โดยเปลี่ยนระดับ 0–3.3 V บน P10 ขึ้นเป็น 0–5 V บน SYN
Note
พิน P0, P1, P2, P6 และ P10 แต่ละตัวสามารถนำไปใช้งานอื่นได้ P0, P2, P6 และ P10 เชื่อมต่อเป็นค่าเริ่มต้นผ่านจัมเปอร์บัดกรีด้านหลัง — เปิดจัมเปอร์ของพินที่ต้องการปลดออก P1 ค่าเริ่มต้นคือไม่ได้เชื่อมต่อ: บัดกรีจัมเปอร์ด้านหน้าเพื่อเชื่อมรีเลย์ 2 ไปที่ P1 แทน (และเปิดจัมเปอร์ด้านหลังของ P2 เพื่อปลด P2)
Note
รีเลย์ค่าเริ่มต้นคือปกติเปิด (NO) บัดกรีสะพานที่ด้านล่างของ shield เพื่อเปลี่ยนเป็นปกติปิด (NC)
การใช้งาน¶
สลับรีเลย์ทั้งสองจาก P0 และ P1:
from machine import Pin
import time
relay1 = Pin("P0", Pin.OUT)
relay2 = Pin("P1", Pin.OUT)
while True:
relay1.on()
relay2.off()
time.sleep(1)
relay1.off()
relay2.on()
time.sleep(1)
อ่านอินพุตบล็อกเทอร์มินัล AIN ผ่านพิน P6 ที่เปลี่ยนระดับแล้ว:
from machine import ADC
import time
ain = ADC("P6")
while True:
v = ain.read_u16() * 3.3 / 65535
print("AIN:", v * (5.0 / 3.3), "V")
time.sleep_ms(100)
ตอบสนองต่อขอบขาลงบนสาย SYN — ตัวอย่างเช่น เพื่อซิงค์กล้องกับอุปกรณ์อื่นที่ดึง SYN ต่ำ:
from machine import Pin
def on_sync(pin):
print("SYN falling edge")
syn = Pin("P10", Pin.IN)
syn.irq(on_sync, Pin.IRQ_FALLING)