Touch LCD Shield¶
Touch LCD Shield มอบจอแสดงผล TFT LCD ขนาด 2.3 นิ้ว 320x240 แบบ capacitive multi-touch ให้กับ OpenMV Cam เพื่อแสดงตัวอย่างเอาต์พุตกล้อง (และรับอินพุต) โดยไม่ต้องใช้คอมพิวเตอร์โฮสต์ Qwiic header สองตัวช่วยให้เชื่อมต่ออุปกรณ์ I2C เพิ่มเติมได้ง่าย
ดูข้อมูล datasheet ฉบับเต็ม รูปภาพ และการสั่งซื้อได้ที่ หน้าผลิตภัณฑ์ Touch LCD Shield
จุดเด่น¶
TFT LCD ขนาด 2.3 นิ้ว 320x240 RGB565 16 บิต
อินพุต capacitive multi-touch
แบ็คไลต์ควบคุมด้วย PWM
Qwiic connector สองตัวสำหรับการเชื่อมต่ออุปกรณ์ I2C ได้ง่าย
ผังพิน¶
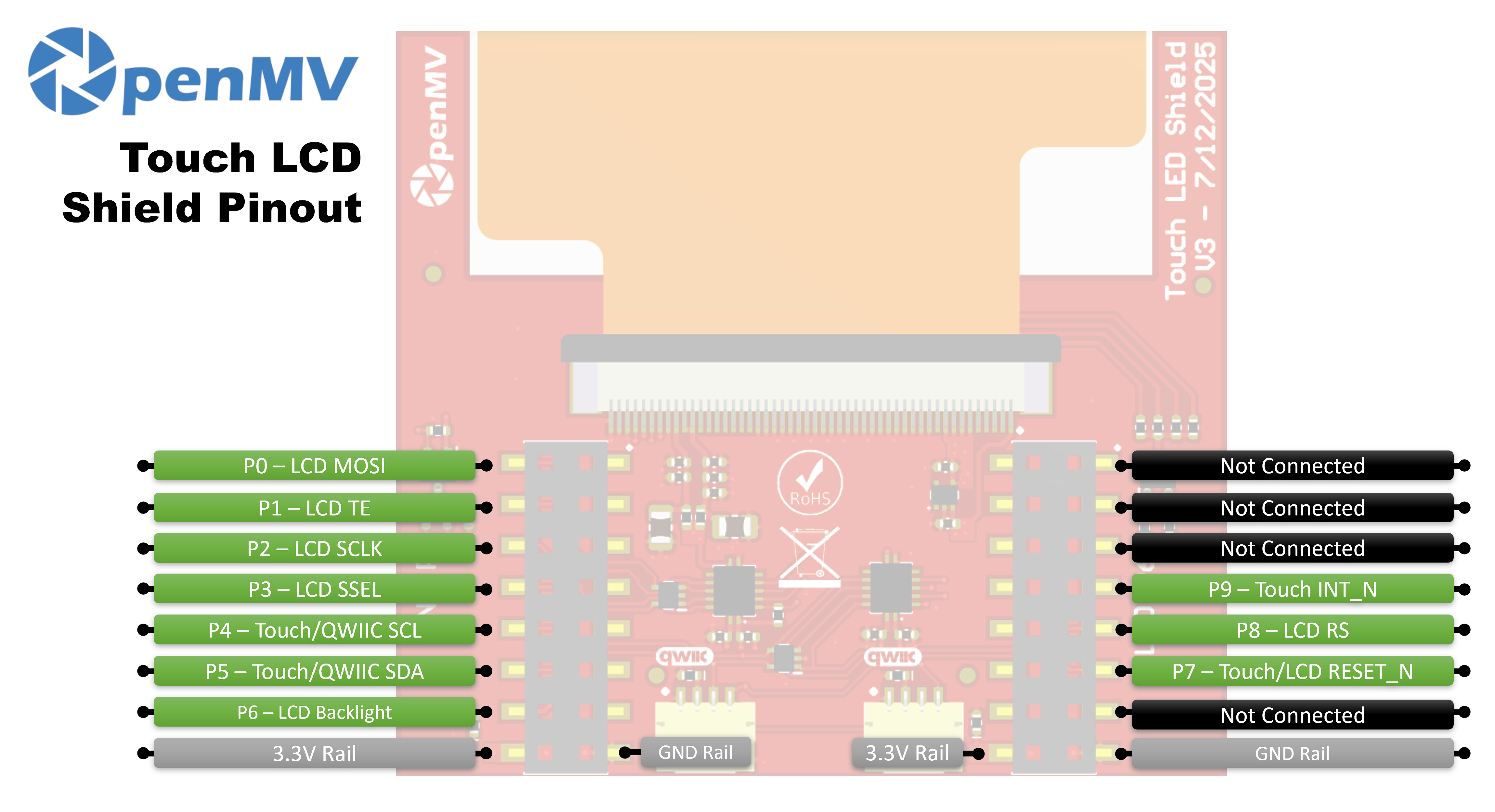
อ้างอิงพิน¶
พิน |
ฟังก์ชัน |
|---|---|
P0 |
LCD MOSI (ข้อมูล SPI ไปยังจอแสดงผล) |
P1 |
LCD TE (เอาต์พุต tearing-effect) |
P2 |
LCD SCLK (สัญญาณนาฬิกา SPI) |
P3 |
LCD SSEL (SPI chip select) |
P4 |
Touch / Qwiic SCL (สัญญาณนาฬิกา I²C — ใช้ร่วมกับ Qwiic header) |
P5 |
Touch / Qwiic SDA (สัญญาณข้อมูล I²C — ใช้ร่วมกับ Qwiic header) |
P6 |
แบ็คไลต์ LCD |
P7 |
Touch / LCD RESET_N |
P8 |
LCD RS (เลือกข้อมูล / คำสั่ง) |
P9 |
Touch INT_N |
3.3V rail |
จ่ายไฟให้ LCD และตัวควบคุม touch |
GND rail |
กราวด์ร่วม |
การใช้งาน¶
ขับ shield ผ่านคลาส display.SPIDisplay ส่งเฟรมกล้องแบบสตรีมไปยัง LCD 320×240:
import csi
import time
import display
import image
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.QVGA)
lcd = display.SPIDisplay(width=320,
height=240,
bgr=True,
vflip=False,
hmirror=False)
clock = time.clock()
while True:
clock.tick()
lcd.write(csi0.snapshot(), hint=image.CENTER | image.SCALE_ASPECT_KEEP)
print(clock.fps())
ขับแบ็คไลต์ผ่าน PWM เพื่อความสว่างที่ปรับได้ ห่อ machine.PWM ในคลาสตัวควบคุมแบ็คไลต์ขนาดเล็กและส่งต่อไปยัง SPIDisplay ผ่านอาร์กิวเมนต์ backlight — SPIDisplay เรียก backlight(value) บนออบเจ็กต์เมื่อต้องการอัปเดตระดับ:
import csi
import time
import display
import image
from machine import Pin, PWM
class PWMBacklight:
"""Drives a backlight pin with machine.PWM (0–100 %)."""
def __init__(self, pin, frequency=200):
self._pwm = PWM(Pin(pin), freq=frequency, duty_u16=0)
def backlight(self, value):
self._pwm.duty_u16(int(value * 65535 / 100))
def deinit(self):
self._pwm.deinit()
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.QVGA)
lcd = display.SPIDisplay(width=320,
height=240,
bgr=True,
vflip=False,
hmirror=False,
backlight=PWMBacklight("P6"))
lcd.backlight(50) # 0–100
clock = time.clock()
while True:
clock.tick()
lcd.write(csi0.snapshot(), hint=image.CENTER | image.SCALE_ASPECT_KEEP)
print(clock.fps())
อ่านอินพุต multi-touch จากตัวควบคุม capacitive FT6x36 บนบอร์ด ซึ่งต่อสายกับ I²C bus ของกล้องบน P4/P5 โดยมี reset บน P7 และ IRQ บน P9 ตัวอย่างด้านล่างจับคู่ touch กับการสตรีมกล้องสด โดยวาดวงกลมสีแดงบน LCD ตรงที่นิ้วแตะ:
from time import sleep_ms
from array import array
from machine import Pin, SoftI2C
import csi
import display
import image
import time
_DEFAULT_ADDR = const(0x38)
_DEV_MODE = const(0x00)
_TD_STATUS = const(0x02)
class FT6X36:
FLAG_PRESSED = 0
FLAG_RELEASED = 1
FLAG_MOVED = 2
def __init__(
self,
bus,
reset_pin,
irq_pin,
address=_DEFAULT_ADDR,
width=320,
height=240,
reverse_x=False,
reverse_y=False,
touch_callback=None,
):
self.bus = bus
self.address = address
self.width = width
self.height = height
self.reverse_x = reverse_x
self.reverse_y = reverse_y
self.touch_callback = touch_callback
# reset_pin=None skips the reset pulse — useful when another
# peripheral on the same line (e.g. the LCD) has already done it.
if reset_pin is not None:
self.rst_pin = Pin(reset_pin, Pin.OUT_PP, value=0)
else:
self.rst_pin = None
self.irq_pin = None
self.irq_pin_label = irq_pin
# Reset the touch panel controller.
self.reset()
# Put the controller into normal operating mode.
self._write_reg(_DEV_MODE, 0x00)
# Scratch buffer for points (x, y, flag, id) — chip max 2.
self.points_data = [array("H", [0, 0, 0, 0]) for _ in range(2)]
self._touch_points_old = 0
self._touch_points = 0
def _read_reg(self, reg, size=1, buf=None):
# FT6X36 expects two separate START/STOP transactions
# (no repeated start), so don't use readfrom_mem here.
self.bus.writeto(self.address, bytes([reg]))
if buf is not None:
self.bus.readfrom_into(self.address, buf)
else:
return self.bus.readfrom(self.address, size)
def _write_reg(self, reg, val, size=1):
if size == 1:
buf = bytes([reg, val & 0xFF])
else:
buf = bytes([reg, val & 0xFF, val >> 8])
self.bus.writeto(self.address, buf)
def reset(self):
if self.irq_pin is not None:
self.irq_pin.irq(handler=None)
if self.rst_pin is not None:
self.rst_pin(0)
sleep_ms(1)
self.rst_pin(1)
sleep_ms(39)
self.irq_pin = Pin(self.irq_pin_label, Pin.IN, Pin.PULL_UP)
if self.touch_callback is not None:
self.irq_pin.irq(
handler=self.touch_callback,
trigger=Pin.IRQ_FALLING,
hard=False,
)
def read_points(self):
regs = self._read_reg(_TD_STATUS, 13)
n_points = min(regs[0] & 0x0F, 2)
for i in range(0, n_points):
base = 1 + i * 6
x = ((regs[base] & 0xF) << 8) | regs[base + 1]
y = ((regs[base + 2] & 0xF) << 8) | regs[base + 3]
if self.reverse_x:
x = self.width - 1 - x
if self.reverse_y:
y = self.height - 1 - y
self.points_data[i][0] = x
self.points_data[i][1] = y
self.points_data[i][2] = regs[base] >> 6
self.points_data[i][3] = regs[base + 2] >> 4
# Mark previously-active slots as released so the caller
# sees a release event after a finger lifts.
for i in range(n_points, 2):
self.points_data[i][2] = self.FLAG_RELEASED
# Latch touch count: rising immediate, falling debounced one read.
if n_points >= self._touch_points:
self._touch_points = n_points
elif n_points <= self._touch_points_old:
self._touch_points = self._touch_points_old
self._touch_points_old = n_points
return self._touch_points, self.points_data
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.QVGA)
lcd = display.SPIDisplay(width=320,
height=240,
bgr=True,
vflip=False,
hmirror=False)
# The LCD and touch controllers share P7 as a reset line. The LCD
# has already pulsed it during its own init, so init the touch
# controller after with reset_pin=None to skip a redundant pulse.
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"), freq=100_000)
touch = FT6X36(bus, reset_pin=None, irq_pin="P9", reverse_y=True)
clock = time.clock()
# Some sensors return less than 240 lines at QVGA (e.g. 320x200 on
# the N6). The display centers the frame, so map touch Y to image Y.
y_offset = (touch.height - csi0.height()) // 2
while True:
clock.tick()
img = csi0.snapshot()
n, points = touch.read_points()
for i in range(n):
x, y, flag, tid = points[i]
if flag != FT6X36.FLAG_RELEASED:
iy = y - y_offset
if 0 <= iy < csi0.height():
img.draw_circle(
(x, iy, 18), color=(255, 0, 0), thickness=2
)
lcd.write(img, hint=image.CENTER | image.SCALE_ASPECT_KEEP)
print(clock.fps())