Touch LCD Shield¶
Touch LCD Shield trang bị cho OpenMV Cam màn hình cảm ứng đa điểm điện dung 2,3 inch 320x240 để xem trước đầu ra camera (và nhận đầu vào) mà không cần máy tính chủ. Hai đầu nối Qwiic giúp dễ dàng kết nối chuỗi các thiết bị I2C.
Để xem datasheet đầy đủ, ảnh và đặt hàng, hãy xem trang sản phẩm Touch LCD Shield.
Tính năng nổi bật¶
TFT LCD 2,3 inch, 320x240, RGB565 16-bit
Đầu vào cảm ứng đa điểm điện dung
Đèn nền điều chỉnh qua PWM
Hai đầu nối Qwiic để dễ dàng kết nối chuỗi thiết bị I2C
Sơ đồ chân¶
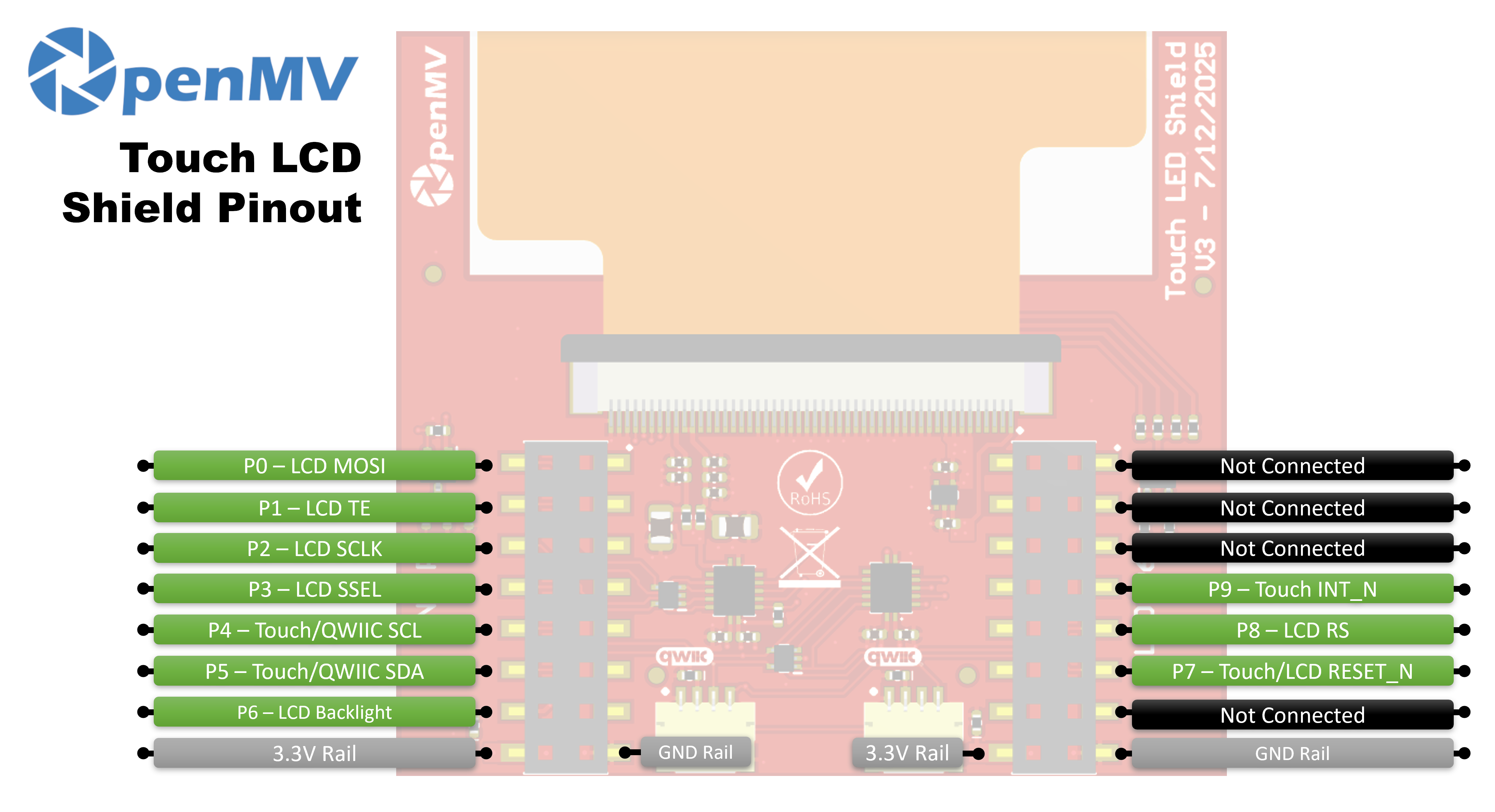
Tham chiếu chân (pin)¶
Chân (Pin) |
Chức năng |
|---|---|
P0 |
LCD MOSI (dữ liệu SPI đến màn hình) |
P1 |
LCD TE (đầu ra hiệu ứng xé hình) |
P2 |
LCD SCLK (xung nhịp SPI) |
P3 |
LCD SSEL (chip select SPI) |
P4 |
Touch / Qwiic SCL (xung nhịp I²C — dùng chung với đầu nối Qwiic) |
P5 |
Touch / Qwiic SDA (dữ liệu I²C — dùng chung với đầu nối Qwiic) |
P6 |
Đèn nền LCD |
P7 |
Touch / LCD RESET_N |
P8 |
LCD RS (chọn dữ liệu / lệnh) |
P9 |
Touch INT_N |
3.3V rail |
Cấp nguồn cho bộ điều khiển LCD và cảm ứng |
GND rail |
Đất chung |
Cách sử dụng¶
Điều khiển shield qua lớp display.SPIDisplay. Truyền phát khung hình camera lên LCD 320×240:
import csi
import time
import display
import image
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.QVGA)
lcd = display.SPIDisplay(width=320,
height=240,
bgr=True,
vflip=False,
hmirror=False)
clock = time.clock()
while True:
clock.tick()
lcd.write(csi0.snapshot(), hint=image.CENTER | image.SCALE_ASPECT_KEEP)
print(clock.fps())
Điều khiển đèn nền qua PWM để điều chỉnh độ sáng. Bọc machine.PWM trong một lớp điều khiển đèn nền nhỏ và truyền nó vào SPIDisplay qua đối số backlight — SPIDisplay sẽ gọi backlight(value) trên đối tượng bất cứ khi nào cần cập nhật mức sáng:
import csi
import time
import display
import image
from machine import Pin, PWM
class PWMBacklight:
"""Drives a backlight pin with machine.PWM (0–100 %)."""
def __init__(self, pin, frequency=200):
self._pwm = PWM(Pin(pin), freq=frequency, duty_u16=0)
def backlight(self, value):
self._pwm.duty_u16(int(value * 65535 / 100))
def deinit(self):
self._pwm.deinit()
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.QVGA)
lcd = display.SPIDisplay(width=320,
height=240,
bgr=True,
vflip=False,
hmirror=False,
backlight=PWMBacklight("P6"))
lcd.backlight(50) # 0–100
clock = time.clock()
while True:
clock.tick()
lcd.write(csi0.snapshot(), hint=image.CENTER | image.SCALE_ASPECT_KEEP)
print(clock.fps())
Đọc đầu vào đa điểm cảm ứng từ bộ điều khiển điện dung FT6x36 tích hợp — kết nối với bus I²C của camera trên P4/P5 với reset trên P7 và IRQ trên P9. Ví dụ dưới đây kết hợp cảm ứng với truyền phát camera trực tiếp, vẽ hình tròn màu đỏ trên LCD tại vị trí ngón tay chạm vào:
from time import sleep_ms
from array import array
from machine import Pin, SoftI2C
import csi
import display
import image
import time
_DEFAULT_ADDR = const(0x38)
_DEV_MODE = const(0x00)
_TD_STATUS = const(0x02)
class FT6X36:
FLAG_PRESSED = 0
FLAG_RELEASED = 1
FLAG_MOVED = 2
def __init__(
self,
bus,
reset_pin,
irq_pin,
address=_DEFAULT_ADDR,
width=320,
height=240,
reverse_x=False,
reverse_y=False,
touch_callback=None,
):
self.bus = bus
self.address = address
self.width = width
self.height = height
self.reverse_x = reverse_x
self.reverse_y = reverse_y
self.touch_callback = touch_callback
# reset_pin=None skips the reset pulse — useful when another
# peripheral on the same line (e.g. the LCD) has already done it.
if reset_pin is not None:
self.rst_pin = Pin(reset_pin, Pin.OUT_PP, value=0)
else:
self.rst_pin = None
self.irq_pin = None
self.irq_pin_label = irq_pin
# Reset the touch panel controller.
self.reset()
# Put the controller into normal operating mode.
self._write_reg(_DEV_MODE, 0x00)
# Scratch buffer for points (x, y, flag, id) — chip max 2.
self.points_data = [array("H", [0, 0, 0, 0]) for _ in range(2)]
self._touch_points_old = 0
self._touch_points = 0
def _read_reg(self, reg, size=1, buf=None):
# FT6X36 expects two separate START/STOP transactions
# (no repeated start), so don't use readfrom_mem here.
self.bus.writeto(self.address, bytes([reg]))
if buf is not None:
self.bus.readfrom_into(self.address, buf)
else:
return self.bus.readfrom(self.address, size)
def _write_reg(self, reg, val, size=1):
if size == 1:
buf = bytes([reg, val & 0xFF])
else:
buf = bytes([reg, val & 0xFF, val >> 8])
self.bus.writeto(self.address, buf)
def reset(self):
if self.irq_pin is not None:
self.irq_pin.irq(handler=None)
if self.rst_pin is not None:
self.rst_pin(0)
sleep_ms(1)
self.rst_pin(1)
sleep_ms(39)
self.irq_pin = Pin(self.irq_pin_label, Pin.IN, Pin.PULL_UP)
if self.touch_callback is not None:
self.irq_pin.irq(
handler=self.touch_callback,
trigger=Pin.IRQ_FALLING,
hard=False,
)
def read_points(self):
regs = self._read_reg(_TD_STATUS, 13)
n_points = min(regs[0] & 0x0F, 2)
for i in range(0, n_points):
base = 1 + i * 6
x = ((regs[base] & 0xF) << 8) | regs[base + 1]
y = ((regs[base + 2] & 0xF) << 8) | regs[base + 3]
if self.reverse_x:
x = self.width - 1 - x
if self.reverse_y:
y = self.height - 1 - y
self.points_data[i][0] = x
self.points_data[i][1] = y
self.points_data[i][2] = regs[base] >> 6
self.points_data[i][3] = regs[base + 2] >> 4
# Mark previously-active slots as released so the caller
# sees a release event after a finger lifts.
for i in range(n_points, 2):
self.points_data[i][2] = self.FLAG_RELEASED
# Latch touch count: rising immediate, falling debounced one read.
if n_points >= self._touch_points:
self._touch_points = n_points
elif n_points <= self._touch_points_old:
self._touch_points = self._touch_points_old
self._touch_points_old = n_points
return self._touch_points, self.points_data
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.QVGA)
lcd = display.SPIDisplay(width=320,
height=240,
bgr=True,
vflip=False,
hmirror=False)
# The LCD and touch controllers share P7 as a reset line. The LCD
# has already pulsed it during its own init, so init the touch
# controller after with reset_pin=None to skip a redundant pulse.
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"), freq=100_000)
touch = FT6X36(bus, reset_pin=None, irq_pin="P9", reverse_y=True)
clock = time.clock()
# Some sensors return less than 240 lines at QVGA (e.g. 320x200 on
# the N6). The display centers the frame, so map touch Y to image Y.
y_offset = (touch.height - csi0.height()) // 2
while True:
clock.tick()
img = csi0.snapshot()
n, points = touch.read_points()
for i in range(n):
x, y, flag, tid = points[i]
if flag != FT6X36.FLAG_RELEASED:
iy = y - y_offset
if 0 <= iy < csi0.height():
img.draw_circle(
(x, iy, 18), color=(255, 0, 0), thickness=2
)
lcd.write(img, hint=image.CENTER | image.SCALE_ASPECT_KEEP)
print(clock.fps())